车速确定方法、装置、车辆和存储介质与流程
本申请属于汽车,尤其涉及一种车速确定方法、装置、车辆和存储介质。
背景技术:
1、车速是表征车辆运动状态的重要参数,是车辆运动学及动力学控制的基础参数之一。通过轮速来确定整车车速是一种常见的确定车速的方法。
2、随着汽车技术的发展,分布式驱动系统日渐成熟。在分布式驱动系统下,不同的车轮的轮速可能不同,因此,亟需一种选择最优轮速以便准确确定车速的方法。
技术实现思路
1、本申请的目的在于提供一种车速确定方法、装置、车辆和存储介质,旨在解决传统的轮速确定不准确的问题。
2、本申请实施例的第一方面提供了一种车速确定方法,所述方法包括:
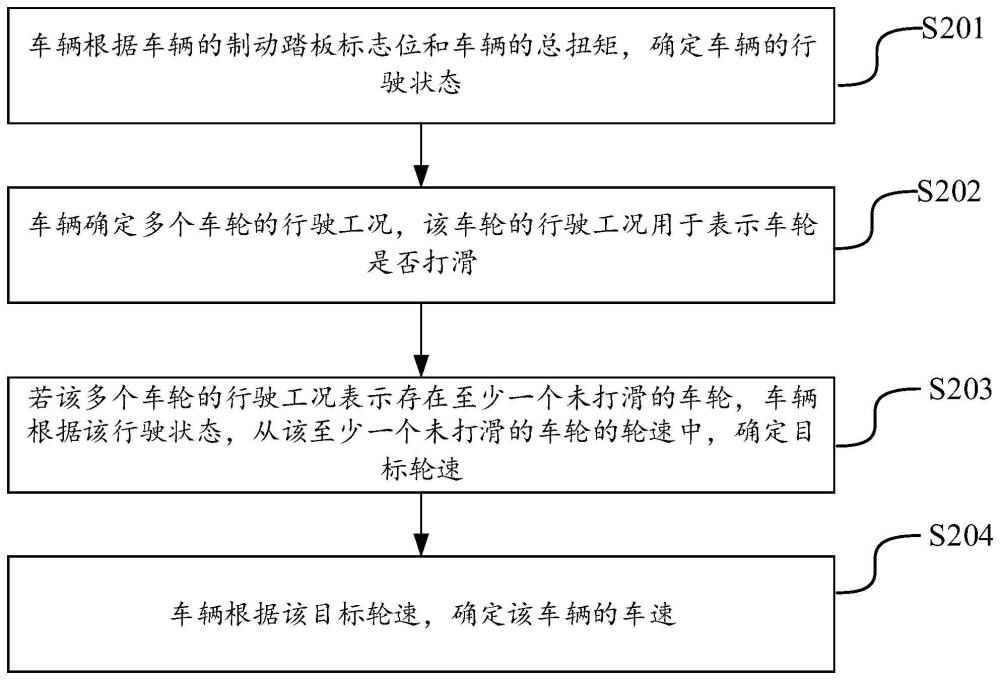
3、根据车辆的制动踏板标志位和车辆的总扭矩,确定车辆的行驶状态;
4、确定多个车轮的行驶工况,所述车轮的行驶工况用于表示车轮是否打滑;
5、若所述多个车轮的行驶工况表示存在至少一个未打滑的车轮,根据所述行驶状态,从所述至少一个未打滑的车轮的轮速中,确定目标轮速;
6、根据所述目标轮速,确定所述车辆的车速。
7、在一些实施例中,所述根据所述行驶状态,从所述至少一个未打滑的车轮的轮速中,确定目标轮速,包括:
8、若所述行驶状态为驱动状态,从所述至少一个未打滑的车轮的轮速中,确定最小轮速;
9、将所述最小轮速确定为所述目标轮速。
10、在一些实施例中,所述根据所述行驶状态,从所述至少一个未打滑的车轮的轮速中,确定目标轮速,包括:
11、若所述行驶状态为制动状态,从所述至少一个未打滑的车轮的轮速中,确定最大轮速;
12、将所述最大轮速确定为所述目标轮速。
13、在一些实施例中,所述根据车辆的制动踏板标志位和车辆的总扭矩,确定车辆的行驶状态,包括:
14、若所述制动踏板标志位表示制动踏板未踩下,且所述车辆的总扭矩大于预设阈值,确定所述车辆的行驶状态为驱动状态;
15、若所述制动踏板标志位表示制动踏板被踩下,或者,所述车辆的总扭矩小于或等于预设阈值,确定所述车辆的行驶状态为制动状态。
16、在一些实施例中,所述根据所述目标轮速,确定所述车辆的车速,包括:
17、确定所述车辆的行驶方向;
18、根据所述车辆的行驶方向和所述目标轮速,确定所述车辆的车速。
19、在一些实施例中,所述确定所述车辆的行驶方向,包括:
20、确定所述多个车轮的平均轮速;
21、若所述平均轮速大于0,则确定所述车辆的行驶方向为前进方向;
22、若所述平均轮速不大于0,则确定所述车辆的行驶方向为后退方向。
23、在一些实施例中,所述方法还包括:
24、若所述多个车轮的行驶工况表示不存在未打滑的车轮,获取车辆的纵向加速度;
25、通过对所述车辆的纵向加速度进行积分,得到所述车辆的车速。
26、本申请实施例的第二方面提供了一种车速确定装置,所述装置包括:
27、行驶状态确定单元,用于根据车辆的制动踏板标志位和车辆的总扭矩,确定车辆的行驶状态;
28、工况确定单元,用于确定多个车轮的行驶工况,所述车轮的行驶工况用于表示车轮是否打滑;
29、轮速确定单元,用于若所述多个车轮的行驶工况表示存在至少一个未打滑的车轮,根据所述行驶状态,从所述至少一个未打滑的车轮的轮速中,确定目标轮速;
30、车速确定单元,用于根据所述目标轮速,确定所述车辆的车速。
31、在一些实施例中,所述轮速确定单元,用于若所述行驶状态为驱动状态,从所述至少一个未打滑的车轮的轮速中,确定最小轮速;将所述最小轮速确定为所述目标轮速。
32、在一些实施例中,所述轮速确定单元,用于若所述行驶状态为制动状态,从所述至少一个未打滑的车轮的轮速中,确定最大轮速;将所述最大轮速确定为所述目标轮速。
33、在一些实施例中,所述行驶状态确定单元,用于若所述制动踏板标志位表示制动踏板未踩下,且所述车辆的总扭矩大于预设阈值,确定所述车辆的行驶状态为驱动状态;若所述制动踏板标志位表示制动踏板被踩下,或者,所述车辆的总扭矩小于或等于预设阈值,确定所述车辆的行驶状态为制动状态。
34、在一些实施例中,所述车速确定单元,用于确定所述车辆的行驶方向;根据所述车辆的行驶方向和所述目标轮速,确定所述车辆的车速。
35、在一些实施例中,所述车速确定单元,用于确定所述多个车轮的平均轮速;若所述平均轮速大于0,则确定所述车辆的行驶方向为前进方向;若所述平均轮速不大于0,则确定所述车辆的行驶方向为后退方向。
36、在一些实施例中,所述装置还包括:
37、获取单元,用于若所述多个车轮的行驶工况表示不存在未打滑的车轮,获取车辆的纵向加速度;
38、所述车速确定单元,用于通过对所述车辆的纵向加速度进行积分,得到所述车辆的车速。
39、本申请实施例的第三方面提了一种车辆,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上所述车速确定方法。
40、本申请实施例的第四方面提了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如上所述车速确定方法。
41、本发明实施例与现有技术相比存在的有益效果是:
42、在本申请实施例中,通过从未打滑的车轮中,确定满足当前行驶状态的最佳目标轮速,从而根据该目标轮速确定车辆的速度,这样防止了车辆打滑对车速确定的影响,提高了确定车速的准确性。并且,结合车辆的行驶状态选择目标轮速,防止选择到当前行驶状态下处于临界值的轮速,进一步提高了确定轮速的准确性。
技术特征:
1.一种车速确定方法,其特征在于,所述方法包括:
2.如权利要求1所述的方法,其特征在于,所述根据所述行驶状态,从所述至少一个未打滑的车轮的轮速中,确定目标轮速,包括:
3.如权利要求1所述的方法,其特征在于,所述根据所述行驶状态,从所述至少一个未打滑的车轮的轮速中,确定目标轮速,包括:
4.如权利要求1所述的方法,其特征在于,所述根据车辆的制动踏板标志位和车辆的总扭矩,确定车辆的行驶状态,包括:
5.如权利要求1所述的方法,其特征在于,所述根据所述目标轮速,确定所述车辆的车速,包括:
6.如权利要求5所述的方法,其特征在于,所述确定所述车辆的行驶方向,包括:
7.如权利要求1-6任一项所述方法,其特征在于,所述方法还包括:
8.一种车速确定装置,其特征在于,所述装置包括:
9.一种车辆,其特征在于,所述车辆包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序使实现如权利要求1至7任一项所述的车速确定方法。
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至7任一项所述的车速确定方法。
技术总结
本申请提供了一种车速确定方法、装置、车辆和存储介质,属于汽车技术领域,该方法包括:根据车辆的制动踏板标志位和车辆的总扭矩,确定车辆的行驶状态;确定多个车轮的行驶工况,车轮的行驶工况用于表示车轮是否打滑;若多个车轮的行驶工况表示存在至少一个未打滑的车轮,根据行驶状态,从至少一个未打滑的车轮的轮速中,确定目标轮速;根据目标轮速,确定车辆的车速。通过从未打滑的车轮中,确定满足当前行驶状态的最佳目标轮速,从而根据该目标轮速确定车辆的速度,这样防止了车辆打滑对车速确定的影响,提高了确定车速的准确性。结合车辆的行驶状态选择目标轮速,防止选择到当前行驶状态下处于临界值的轮速,进一步提高了确定轮速的准确性。
技术研发人员:舒婕,连志远,刘佳函,高国伟,周德祥
受保护的技术使用者:长城汽车股份有限公司
技术研发日:
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!