一种颠簸路段下的车辆控制方法、装置、设备及存储介质与流程
本申请实施例涉及辅助驾驶,特别是涉及一种颠簸路段下的车辆控制方法、装置、设备及存储介质。
背景技术:
1、现阶段人机共驾功能已经逐渐普及,但在自动驾驶的过程中,对于颠簸、坑洼路段等特殊路况缺少提前预警或其他避险手段。若无法对车辆颠簸状态及时做出调整,不仅容易导致车辆底盘磨损,同时也存在驾驶安全隐患,易引发交通事故。
技术实现思路
1、本发明提供了一种颠簸路段下的车辆控制方法、装置、计算机设备及存储介质,通过。
2、第一方面,本发明提供了一种颠簸路段下的车辆控制方法,包括如下步骤:
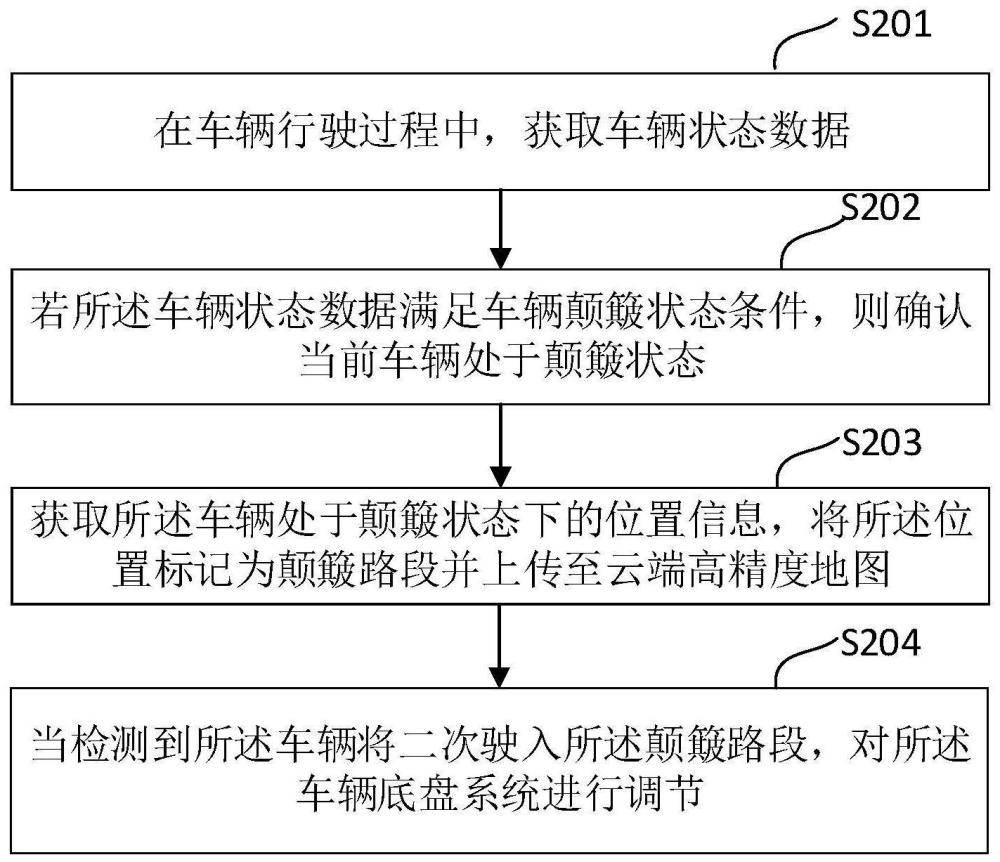
3、在车辆行驶过程中,获取车辆状态数据;
4、若所述车辆状态数据满足车辆颠簸状态条件,则确认当前车辆处于颠簸状态;
5、获取所述车辆处于颠簸状态下的位置信息,将所述位置标记为颠簸路段并上传至云端高精度地图;
6、当检测到所述车辆将二次驶入所述颠簸路段,对所述车辆底盘系统进行调节。
7、进一步地,所述若所述车辆状态数据满足车辆颠簸状态条件,则确认当前车辆处于颠簸状态之后,还包括:
8、通过激光雷达获取路面状态信息,所述路面状态信息包括路面材质、路面平整度、路面障碍物;
9、根据所述路面状态信息和颠簸状态下的车辆状态数据,对当前颠簸路段进行颠簸等级划分。
10、进一步地,所述当检测到所述车辆将二次驶入所述颠簸路段,对所述车辆底盘系统进行调节,还包括:
11、根据所述颠簸等级,对所述车辆底盘系统进行调节,其中,所述颠簸等级包括轻度颠簸、中度颠簸和重度颠簸;
12、当确认车辆处于轻度颠簸状态时,保持底盘高度不变,根据当前车辆状态数据对悬架阻尼进行调节;
13、当确认车辆处于中度颠簸状态时,根据当前车辆状态数据,将所述底盘高度提升至第一高度并对所述悬架阻尼进行调节;
14、当确认车辆处于重度颠簸状态时,将所述底盘高度提升至第二高度并增强所述悬架阻尼,其中,所述第二高度大于所述第一高度。
15、进一步地,所述获取所述车辆处于颠簸状态下的位置信息,将所述位置标记为颠簸路段并上传至云端高精度地图,还包括:
16、在车辆通行所述颠簸路段时,获取所述车辆状态数据;
17、若所述车辆状态数据不满足车辆颠簸状态条件,则将所述位置记录为非颠簸路段;
18、当所述非颠簸路段记录达到两次,则将所述颠簸路段标记为非颠簸路段并上传至云端高精度地图。
19、第二方面,本发明还提供了一种颠簸路段下的车辆控制装置,包括:
20、状态数据获取模块,用于在车辆行驶过程中,获取车辆状态数据;
21、颠簸状态确认模块,用于若所述车辆状态数据满足车辆颠簸状态条件,则确认当前车辆处于颠簸状态;
22、地图标记模块,用于获取所述车辆处于颠簸状态下的位置信息,将所述位置标记为颠簸路段并上传至云端高精度地图;
23、车辆调节模块,用于当检测到所述车辆将二次驶入所述颠簸路段,对所述车辆底盘系统进行调节。
24、进一步地,所述颠簸状态确认模块,还包括:
25、路面信息获取单元,用于通过激光雷达获取路面状态信息,所述路面状态信息包括路面材质、路面平整度、路面障碍物;
26、颠簸等级确认单元,用于根据所述路面状态信息和颠簸状态下的车辆状态数据,对当前颠簸路段进行颠簸等级划分。
27、进一步地,所述车辆调节模块,还包括:
28、底盘系统调节单元,用于根据所述颠簸等级,对所述车辆底盘系统进行调节,其中,所述颠簸等级包括轻度颠簸、中度颠簸和重度颠簸;
29、轻度状态调节单元,用于当确认车辆处于轻度颠簸状态时,保持底盘高度不变,根据当前车辆状态数据对悬架阻尼进行调节;
30、中度状态调节单元,用于当确认车辆处于中度颠簸状态时,根据当前车辆状态数据,将所述底盘高度提升至第一高度并对所述悬架阻尼进行调节;
31、重度状态调节单元,用于当确认车辆处于重度颠簸状态时,将所述底盘高度提升至第二高度并增强所述悬架阻尼,其中,所述第二高度大于所述第一高度。
32、进一步地,所述地图标记模块,还包括:
33、颠簸路段状态数据获取单元,用于在车辆通行所述颠簸路段时,获取所述车辆状态数据;
34、非颠簸路段确认单元,用于若所述车辆状态数据不满足车辆颠簸状态条件,则将所述位置记录为非颠簸路段;
35、颠簸标记取消单元,用于当所述非颠簸路段记录达到两次,则将所述颠簸路段标记为非颠簸路段并上传至云端高精度地图。
36、第三方面,本发明还提供一种计算机设备,包括:
37、至少一个存储器以及至少一个处理器;
38、所述存储器,用于存储一个或多个程序;
39、当所述一个或多个程序被所述至少一个处理器执行,使得所述至少一个处理器实现如第一方面所述的一种颠簸路段下的车辆控制方法的步骤。
40、第四方面,本发明还提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如第一方面所述的一种颠簸路段下的车辆控制方法的步骤。
41、本申请通过在车辆行驶过程中,获取车辆状态数据;若所述车辆状态数据满足车辆颠簸状态条件,则确认当前车辆处于颠簸状态;获取所述车辆处于颠簸状态下的位置信息,将所述位置标记为颠簸路段并上传至云端高精度地图;当检测到所述车辆将二次驶入所述颠簸路段,对所述车辆底盘系统进行调节。本申请能够提前识别前方道路颠簸、坑洼情况,对驾驶员提出预警的同时,提前对底盘高度进行自适应调节的方案,使车主提前了解前方道路情况,及时有效的保护车辆和车主的生命及财产安全。
42、为了更清楚地说明本申请实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本申请的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
技术特征:
1.一种颠簸路段下的车辆控制方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的颠簸路段下的车辆控制方法,其特征在于,所述若所述车辆状态数据满足车辆颠簸状态条件,则确认当前车辆处于颠簸状态之后,还包括:
3.根据权利要求2所述的颠簸路段下的车辆控制方法,其特征在于,所述当检测到所述车辆将二次驶入所述颠簸路段,对所述车辆底盘系统进行调节,还包括:
4.根据权利要求1-3任一项所述的颠簸路段下的车辆控制方法,其特征在于,所述获取所述车辆处于颠簸状态下的位置信息,将所述位置标记为颠簸路段并上传至云端高精度地图,还包括:
5.一种颠簸路段下的车辆控制装置,其特征在于,包括:
6.根据权利要求5所述的颠簸路段下的车辆控制装置,其特征在于,所述颠簸状态确认模块,还包括:
7.根据权利要求5所述的颠簸路段下的车辆控制装置,其特征在于,所述车辆调节模块,还包括:
8.根据权利要求5-7任一项所述的颠簸路段下的车辆控制装置,其特征在于,所述地图标记模块,还包括:
9.一种计算机设备,其特征在于,包括:
10.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至4任一项所述的一种颠簸路段下的车辆控制方法的步骤。
技术总结
本发明提供了一种颠簸路段下的车辆控制方法、装置、设备及存储介质,应用于辅助驾驶技术领域,所述方法包括:通过在车辆行驶过程中,获取车辆状态数据;若所述车辆状态数据满足车辆颠簸状态条件,则确认当前车辆处于颠簸状态;获取所述车辆处于颠簸状态下的位置信息,将所述位置标记为颠簸路段并上传至云端高精度地图;当检测到所述车辆将二次驶入所述颠簸路段,对所述车辆底盘系统进行调节。本申请能够提前识别前方道路颠簸、坑洼情况,对驾驶员提出预警的同时,提前对底盘高度进行自适应调节的方案,使车主提前了解前方道路情况,及时有效的保护车辆和车主的生命及财产安全。
技术研发人员:宋尧,许圣义
受保护的技术使用者:华人运通(上海)云计算科技有限公司
技术研发日:
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!