车辆控制方法、装置、设备、存储介质及程序产品与流程
本申请涉及通信技术,尤其涉及一种车辆控制方法、装置、设备、存储介质及程序产品。
背景技术:
1、在车辆的智能驾驶或者自动驾驶场景中,可以使用piecewise jerk算法进行驾驶的纵向规划或者横向规划。在使用上述piecewise jerk算法进行自动驾驶规划时,需要对该piecewise jerk算法进行优化得到最终的自动驾驶规划结果。其中,现有的优化过程主要是通过硬约束作为优化约束条件。
2、然而,在一些场景中,现有的优化过程可能会出现无解的情况,也就是求解失败。因此还需在车辆的车机系统中部署备选策略,用于在通过piecewise jerk算法求解失败时,基于该备选策略控制车辆行驶。
3、也就是说,现有的车机系统中需部署至少两个策略用于控制车辆行驶,导致系统复杂度较高,且增加了备选策略的设计工作量。若要不需使用备选策略,则需保障能够求解成功。然而如何保障能够求解成功是一个亟待解决的问题。
技术实现思路
1、本申请提供一种车辆控制方法、装置、设备、存储介质及程序产品,用以保障驾驶变量能够求解成功。
2、第一方面,本申请提供一种车辆控制方法,所述方法包括:
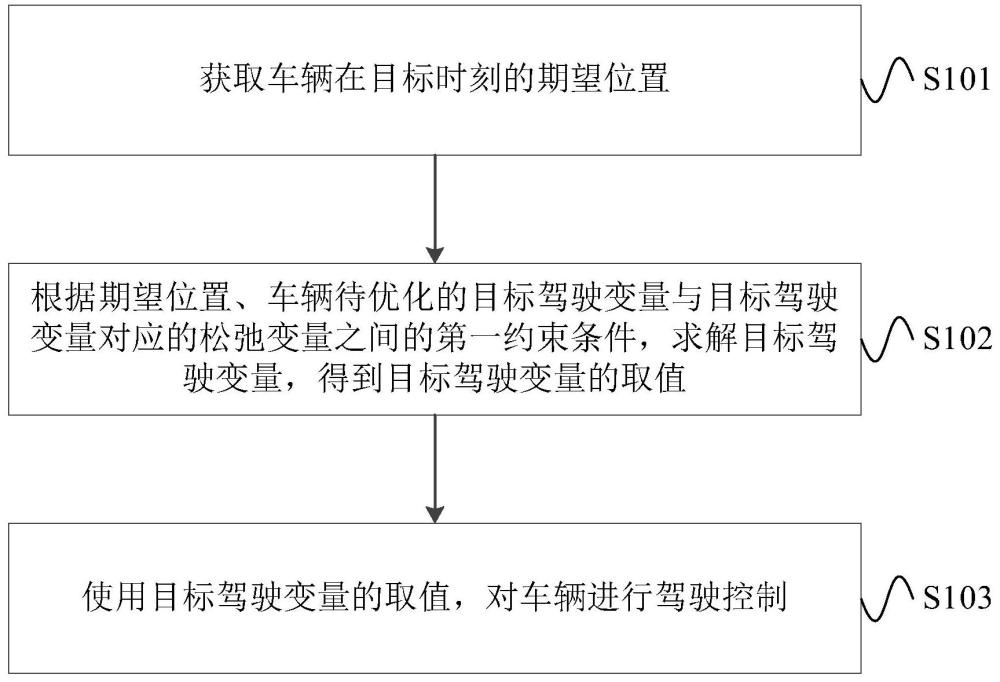
3、获取所述车辆在目标时刻的期望位置;
4、根据所述期望位置、所述车辆待优化的目标驾驶变量与所述目标驾驶变量对应的松弛变量之间的第一约束条件,求解所述目标驾驶变量,得到所述目标驾驶变量的取值;所述目标驾驶变量包括下述至少一项:位置、速度、加速度;
5、使用所述目标驾驶变量的取值,对所述车辆进行驾驶控制。
6、可选的,所述根据所述期望位置、所述车辆待优化的目标驾驶变量与所述目标驾驶变量对应的松弛变量之间的第一约束条件,求解所述目标驾驶变量,得到所述目标驾驶变量的取值,包括:
7、获取基于所述期望位置、所述目标驾驶变量,以及,所述目标驾驶变量对应的松弛变量构建的目标函数;
8、基于所述第一约束条件,对所述目标函数进行优化,得到所述目标驾驶变量的取值。
9、可选的,所述基于所述第一约束条件,对所述目标函数进行优化,得到所述目标驾驶变量的取值,包括:
10、构造所述目标函数的二次项系数矩阵和一次项系数矩阵;
11、基于所述第一约束条件,构造所述目标函数的第二约束条件;
12、基于所述二次项系数矩阵、所述一次项系数矩阵和所述第二约束条件,对所述目标函数进行优化,得到所述目标驾驶变量的取值。
13、可选的,所述基于所述第一约束条件,构造所述目标函数的第二约束条件,包括:
14、基于所述第一约束条件,确定松弛后的目标驾驶变量的下界矩阵,以及,松弛后的目标驾驶变量的上界矩阵;
15、根据所述松弛后的目标驾驶变量的下界矩阵和所述松弛后的目标驾驶变量的上界矩阵,以及,所述第二约束条件的表达式,得到所述第二约束条件。
16、可选的,所述松弛变量包括上界松弛变量和下界松弛变量,且所述松弛变量为所述目标函数的一次项自变量;所述第一约束条件包括:
17、所述上界松弛变量大于或等于第一值,且所述目标驾驶变量的取值与所述上界松弛变量之差小于或等于第一预设上限值;
18、所述下界松弛变量大于或等于第二值,且所述目标驾驶变量的取值与所述下界松弛变量之和大于或等于第一预设下限值。
19、可选的,所述松弛变量包括上界松弛变量和下界松弛变量,且所述松弛变量为所述目标函数的二次项自变量;所述第一约束条件包括:
20、所述目标驾驶变量的取值与所述上界松弛变量之差小于或等于第一预设上限值;
21、所述目标驾驶变量的取值与所述下界松弛变量之和大于或等于第一预设下限值。
22、第二方面,本申请提供一种车辆控制装置,所述装置包括:
23、获取模块,用于获取所述车辆在目标时刻的期望位置;
24、处理模块,用于根据所述期望位置、所述车辆待优化的目标驾驶变量与所述目标驾驶变量对应的松弛变量之间的第一约束条件,求解所述目标驾驶变量,得到所述目标驾驶变量的取值;所述目标驾驶变量包括下述至少一项:位置、速度、加速度;
25、控制模块,用于使用所述目标驾驶变量的取值,对所述车辆进行驾驶控制。
26、第三方面,本申请提供一种电子设备,包括:处理器,以及与所述处理器通信连接的存储器;
27、所述存储器存储计算机执行指令;
28、所述处理器执行所述存储器存储的计算机执行指令,以实现如第一方面任一项所述的方法。
29、第四方面,本申请提供一种计算机可读存储介质,所述计算机可读存储介质中存储有计算机执行指令,所述计算机执行指令被处理器执行时用于实现如第一方面任一项所述的方法。
30、第五方面,本申请提供一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现如第一方面任一项所述的方法。
31、本申请提供的车辆控制方法、装置、设备、存储介质及程序产品,通过车辆在目标时刻的期望位置,可以基于该期望位置,以及,待优化的目标驾驶变量与目标驾驶变量对应的松弛变量之间的第一约束条件,得到各目标时刻的目标驾驶变量的取值,进而可以基于该目标驾驶变量的取值进行辆进行驾驶控制。通过上述方法,在求解目标驾驶变量的取值过程中,以基于目标驾驶变量对应的松弛变量的第一约束条件,作为求解的条件,也就是说该求解空间是松弛可变的,实现了通过软约束得到满足上述第一约束条件的目标驾驶变量的取值。通过上述方法,可以保障求解成功,因此避免了在车机系统中重复部署多种规划算法,降低了车机系统的复杂度。
技术特征:
1.一种车辆控制方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述根据所述期望位置、所述车辆待优化的目标驾驶变量与所述目标驾驶变量对应的松弛变量之间的第一约束条件,求解所述目标驾驶变量,得到所述目标驾驶变量的取值,包括:
3.根据权利要求2所述的方法,其特征在于,所述基于所述第一约束条件,对所述目标函数进行优化,得到所述目标驾驶变量的取值,包括:
4.根据权利要求3所述的方法,其特征在于,所述基于所述第一约束条件,构造所述目标函数的第二约束条件,包括:
5.根据权利要求4所述的方法,其特征在于,所述松弛变量包括上界松弛变量和下界松弛变量,且所述松弛变量为所述目标函数的一次项自变量;所述第一约束条件包括:
6.根据权利要求4所述的方法,其特征在于,所述松弛变量包括上界松弛变量和下界松弛变量,且所述松弛变量为所述目标函数的二次项自变量;所述第一约束条件包括:
7.一种车辆控制装置,其特征在于,所述装置包括:
8.一种电子设备,其特征在于,包括:处理器,以及与所述处理器通信连接的存储器;
9.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质中存储有计算机执行指令,所述计算机执行指令被处理器执行时用于实现如权利要求1至6任一项所述的方法。
10.一种计算机程序产品,其特征在于,包括计算机程序,所述计算机程序被处理器执行时实现如权利要求1至6任一项所述的方法。
技术总结
本申请提供一种车辆控制方法、装置、设备、存储介质及程序产品。该方法包括:获取车辆在目标时刻的期望位置;根据期望位置、车辆待优化的目标驾驶变量与目标驾驶变量对应的松弛变量之间的第一约束条件,求解目标驾驶变量,得到目标驾驶变量的取值;目标驾驶变量包括下述至少一项:位置、速度、加速度;使用目标驾驶变量的取值,对车辆进行驾驶控制。本申请的方法可以保障目标驾驶变量能够求解成功。
技术研发人员:马春山,刘志龙,张高明
受保护的技术使用者:上海云骥智行智能科技有限公司
技术研发日:
技术公布日:2024/3/31
- 还没有人留言评论。精彩留言会获得点赞!