矿用无轨胶轮车及其自动驾驶系统的制作方法
本技术涉及自动驾驶,尤其涉及一种矿用无轨胶轮车及其自动驾驶系统。
背景技术:
1、自动驾驶技术是当前汽车行业重要的前沿技术和发展方向。煤矿井下运输车辆具有运行频繁、运输量大和运行距离长等特点,且巷道狭窄,光线阴暗,沿线道路环境复杂,容易造成安全事故的发生;同时煤矿井下环境是一种相对封闭空间,车辆行驶中突发因素可控,因此,煤矿井下辅助运输更需要也更利于自动驾驶技术的推广运用。
2、目前在相对较为成熟的自动驾驶技术落地案例大多针对码头、港口、园区、露天矿上等封闭场所,所采用的方法是通过在车身四周安装雷达、摄像头等传感器感知车辆周边环境,再结合gnss信号实现预定路线的自动驾驶功能。相较于地面环境,煤矿井下无法接收到gnss信号,现有的自动驾驶车辆无法适用于煤矿井下,无法获取车辆井下的精确定位信息,进而难以保证自动驾驶的安全性。
技术实现思路
1、本实用新型要解决的技术问题是:为了解决现有自动驾驶车辆无法适用于煤矿井下,本实用新型提供一种矿用无轨胶轮车,适用于煤矿井下,提高煤矿井下运输车辆运行的安全性。
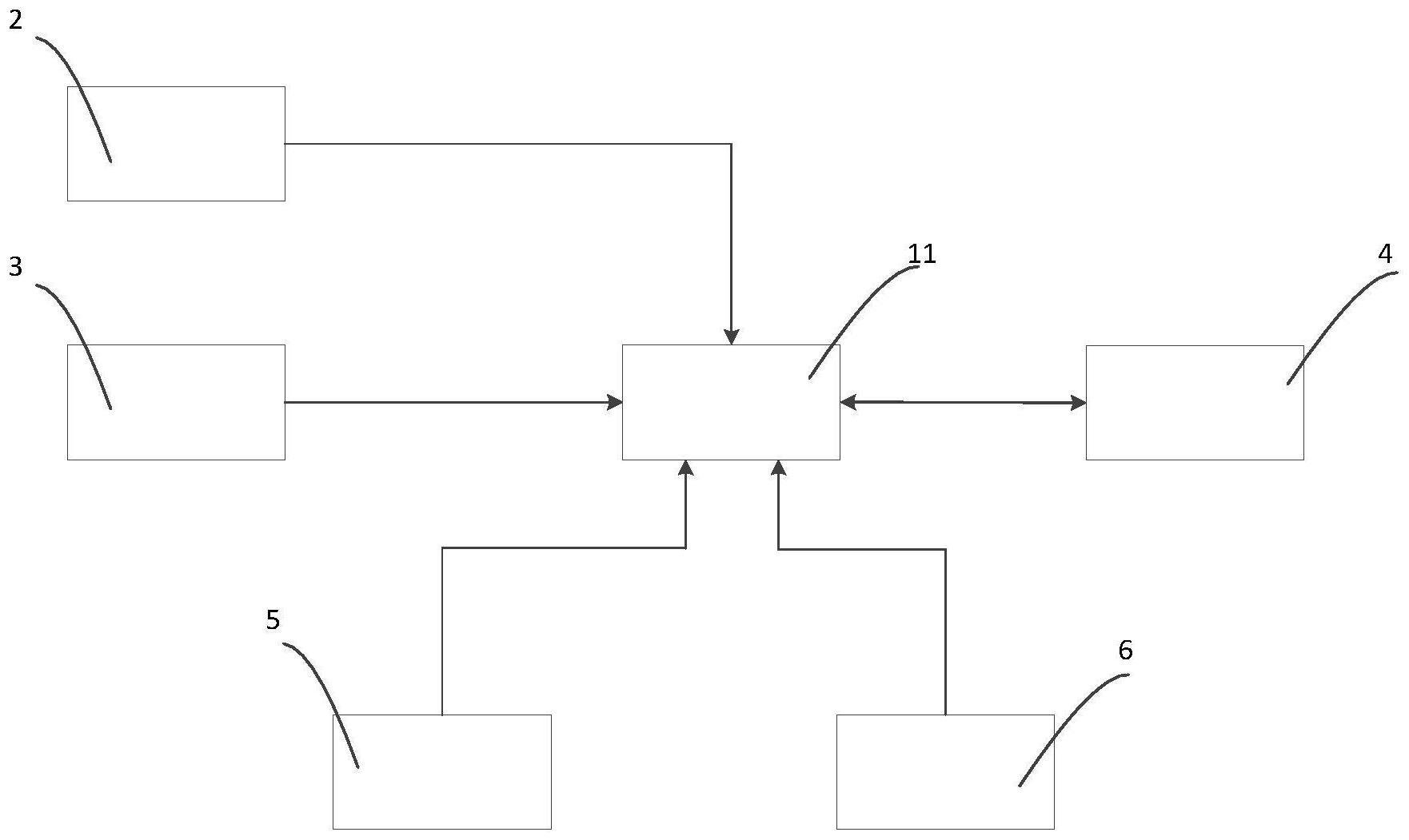
2、本实用新型解决其技术问题所采用的技术方案是:一种矿用无轨胶轮车,包括:车辆本体,所述车辆本体内设置有控制主机;惯性导航仪,固定设置在位于所述车辆本体顶部的中心位置;uwb标识卡,固定设置在所述车辆本体的顶部;第一通信模块,固定设置在所述车辆本体的顶部;若干本安摄像仪,至少固定设置在所述车辆本体的两侧以及所述车辆本体的顶部;雷达检测系统,固定设置在所述车辆本体上;其中,所述惯性导航仪、所述uwb标识卡、所述第一通信模块、所述本安摄像仪以及所述雷达检测系统均与所述控制主机连接。
3、进一步,具体地,所述雷达检测系统包括:若干本安超声波雷达,至少固定设置在车辆本体的前端、所述车辆本体的后端以及所述车辆本体的两侧;两个本安激光雷达,分别固定设置在位于所述车辆本体的前保险杠两侧,且相互对称;本安毫米波雷达,固定设置在位于靠近所述车辆本体的前保险杠的中心位置处。
4、进一步,具体地,所述本安超声波雷达的数量为十二个,四个所述本安超声波雷达设置在位于所述车辆本体前端、且延伸至所述车辆本体的前保险杠上,四个所述本安超声波雷达设置在位于所述车辆本体后端、且延伸至所述车辆本体的后保险杠上,四个所述本安超声波雷达设置在位于所述车辆本体左右两侧、且靠近所述车辆本体后端;每个所述本安超声波雷达均在同一水平线上。
5、进一步,具体地,所述本安摄像仪的数量为六个,分别是第一本安摄像仪、第二本安摄像仪、第三本安摄像仪、第四本安摄像仪、第五本安摄像仪以及第六本安摄像仪;所述第一本安摄像仪和所述第二本安摄像仪分别设置在位于所述车辆本体两侧的后视镜上;所述第三本安摄像仪和所述第四本安摄像仪设置在所述车辆本体的顶部,且分别位于所述本安惯性导航装置的前后位置;所述第五本安摄像仪设置在所述车辆本体的顶部,且位于所述本安惯性导航装置的左右任一侧;所述第六本安摄像仪设置在所述车辆本体内部,且朝向所述驾驶座。
6、进一步,具体地,所述第五本安摄像仪的镜头为长焦镜头。
7、进一步,具体地,每个所述本安超声波雷达的安装高度距离水平地面50-70cm。
8、进一步,具体地,所述本安激光雷达的安装高度和所述车灯或所述后视镜的高度相同。
9、进一步,具体地,所述本安毫米波雷达的安装高度距离所述水平地面60-80cm,所述本安毫米波雷达的收发面垂直于所述水平地面。
10、进一步,具体地,所述第一通信模块为5g模块。
11、一种矿用无轨胶轮车的自动驾驶系统,包括如上所述的矿用无轨胶轮车。
12、本实用新型的有益效果是,本实用新型的矿用无轨胶轮车,通过惯性导航和uwb定位技术,确保了矿用无轨胶轮车在井下无gnss信号的情况下,车辆能够实现精确定位,提高了煤矿井下运输车辆运行的安全性,利用雷达检测系统获取雷达信号,本安摄像仪采集井下图像,全面地探测到矿用无轨胶轮车周边是否有障碍物,保证了矿用无轨胶轮车障碍物感知结果的精确度,进而保证了自动驾驶技术的安全性。
技术特征:
1.一种矿用无轨胶轮车,其特征在于,包括:
2.如权利要求1所述的矿用无轨胶轮车,其特征在于,所述雷达检测系统(6)包括:
3.如权利要求2所述的矿用无轨胶轮车,其特征在于,所述本安超声波雷达(61)的数量为十二个,四个所述本安超声波雷达(61)设置在位于所述车辆本体(1)前端、且延伸至所述车辆本体(1)的前保险杠上,四个所述本安超声波雷达(61)设置在位于所述车辆本体(1)后端、且延伸至所述车辆本体(1)的后保险杠上,四个所述本安超声波雷达(61)设置在位于所述车辆本体(1)左右两侧、且靠近所述车辆本体(1)后端;
4.如权利要求3所述的矿用无轨胶轮车,其特征在于,所述本安摄像仪(5)的数量为六个,分别是第一本安摄像仪(51)、第二本安摄像仪(52)、第三本安摄像仪(53)、第四本安摄像仪(54)、第五本安摄像仪(55)以及第六本安摄像仪;
5.如权利要求4所述的矿用无轨胶轮车,其特征在于,所述第五本安摄像仪(55)的镜头为长焦镜头。
6.如权利要求4所述的矿用无轨胶轮车,其特征在于,每个所述本安超声波雷达(61)的安装高度距离水平地面50-70cm。
7.如权利要求4所述的矿用无轨胶轮车,其特征在于,所述本安激光雷达(62)的安装高度和车灯或所述后视镜的高度相同。
8.如权利要求6所述的矿用无轨胶轮车,其特征在于,所述本安毫米波雷达(63)的安装高度距离所述水平地面60-80cm,所述本安毫米波雷达(63)的收发面垂直于所述水平地面。
9.如权利要求1所述的矿用无轨胶轮车,其特征在于,所述第一通信模块(4)为5g模块。
10.一种矿用无轨胶轮车的自动驾驶系统,其特征在于,包括如权利要求1至9中任一项的所述的矿用无轨胶轮车。
技术总结
本技术涉及自动驾驶技术领域,尤其涉及一种矿用无轨胶轮车及其自动驾驶系统,一种矿用无轨胶轮车,包括:车辆本体,车辆本体内设置有控制主机;惯性导航仪,固定设置在位于车辆本体顶部的中心位置;UWB标识卡,固定设置在车辆本体的顶部;第一通信模块,固定设置在车辆本体的顶部;若干本安摄像仪,至少固定设置在车辆本体的两侧以及车辆本体的顶部;雷达检测系统,固定设置在车辆本体上;其中,惯性导航仪、UWB标识卡、第一通信模块、本安摄像仪以及雷达检测系统均与控制主机连接。本技术的一种矿用无轨胶轮车,适用于煤矿井下,提高煤矿井下运输车辆运行的安全性。
技术研发人员:王天宇,周李兵,邹盛,王国庆,赵叶鑫,于政乾,陈晓晶,卫健健,蒋雪利,王超凡
受保护的技术使用者:天地(常州)自动化股份有限公司
技术研发日:20230103
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!