一种自动驾驶车辆人机共驾线控停车制动装置的制作方法
本技术涉及车辆停车制动,更具体地说,本技术涉及一种自动驾驶车辆人机共驾线控停车制动装置。
背景技术:
1、现有的自动驾驶车辆常常通过几种传感器组合来感知检测环境信息即车辆状态信息,通过车辆智能驾驶控制系统进行决策处理,再经过底层控制系统来控制车辆转向、加速、制动等功能来完成车辆自主驾驶。其中,自动驾驶车辆的停车制动性能是衡量自动驾驶系统的重要指标,关乎车辆的安全性问题。
2、目前,自动驾驶技术尚未成熟,有的车辆制动系统在复杂场景下缺乏人工驾驶干预的措施,因此提出一种自动驾驶车辆人机共驾线控停车制动装置,对停车制动系统进行改进,使自动驾驶线控停车制动与人工停车制动相对独立。
技术实现思路
1、为了克服现有技术的上述缺陷,本实用新型的实施例提供一种自动驾驶车辆人机共驾线控停车制动装置,以解决上述背景技术中提出的问题。
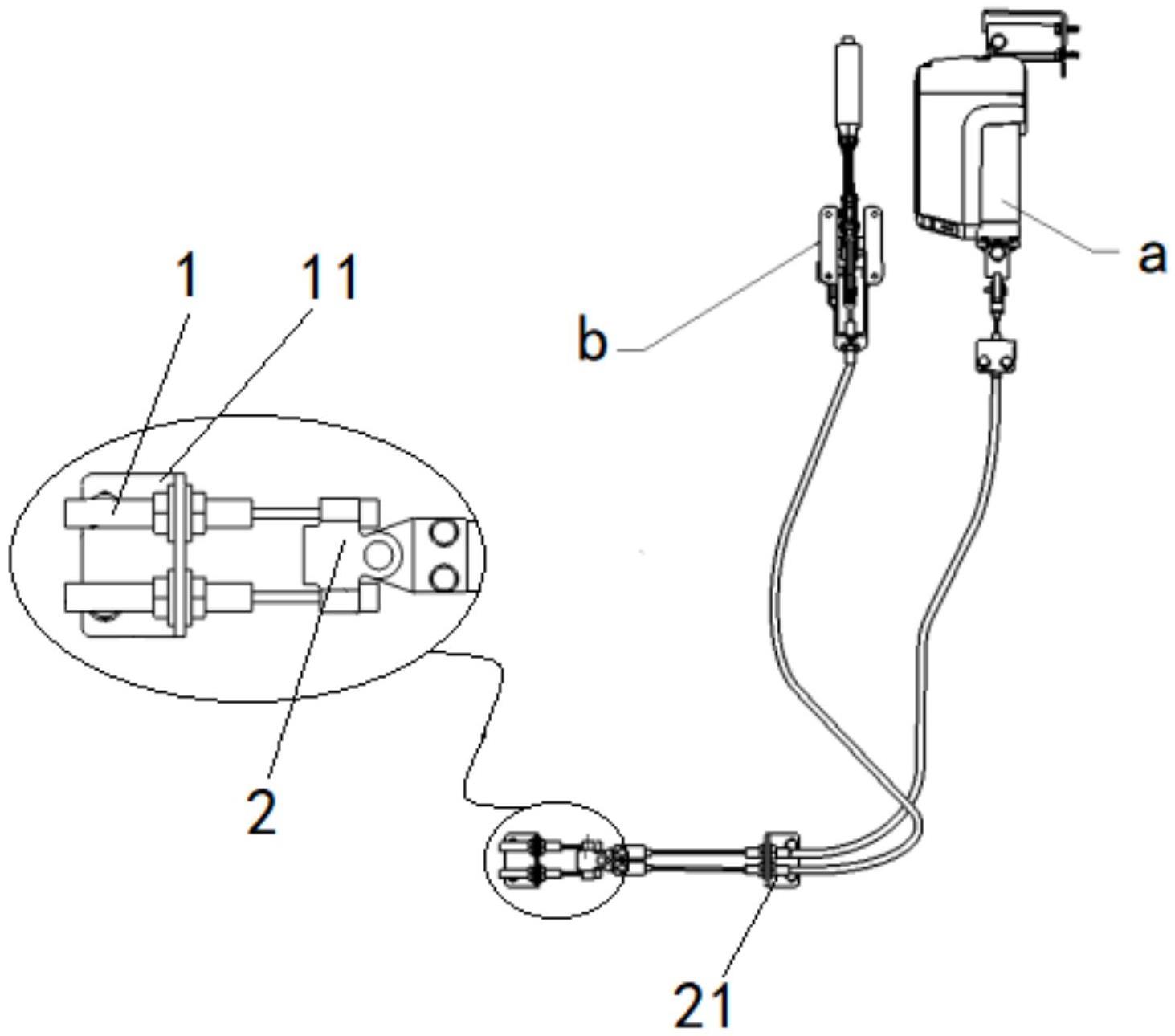
2、为实现上述目的,本实用新型提供如下技术方案:一种自动驾驶车辆人机共驾线控停车制动装置,包括与制动器连接的执行拉索,所述执行拉索远离制动器的一端连接有连接器,所述连接器远离执行拉索的一端设置有线控停车制动机构和人工停车制动机构;
3、所述线控停车制动机构包括线控执行器和线控拉索,所述线控执行器和连接器分别设置在线控拉索的两端;
4、所述人工停车制动机构包括人工手柄和人工拉索,所述人工手柄和连接器分别设置在人工拉索的两端。
5、进一步地,所述线控执行器的顶部通过连接轴连接有上端支架,所述线控执行器的输出端通过连接轴连接有下端支架,所述线控拉索通过连接轴与下端支架连接,所述线控拉索靠近下端支架的表面活动套接有线控拉索支架,且所述线控拉索支架与上端支架均安装在车架上。
6、进一步地,所述人工手柄靠近人工拉索的表面转动连接有安装在车架上的固定架。
7、进一步地,所述人工拉索和线控拉索分别通过连接轴与连接器连接。
8、进一步地,所述人工拉索和线控拉索靠近连接器处活动套接有限位拉索支架,所述限位拉索支架安装在车架上。
9、进一步地,所述执行拉索靠近连接器处活动套接有执行拉索支架,且所述执行拉索支架安装在车架上。
10、本实用新型的技术效果和优点:
11、1、与现有技术相比,本实用新型通过设置的连接器,由于人工手柄和线控执行器分别通过人工拉索和线控拉索带动连接器,从而连接器拉动执行拉索,使得制动器制动;而解除压力后,制动器里面的弹簧自动复位,通过执行拉索复位连接器到初始位置,因此该设置改变原有的人工停车制动系统,使自动驾驶线控停车制动与人工停车制动相对独立,两种方式互不干扰,保证了两种工况下车辆制动安全。
12、2、与现有技术相比,通过设置限位拉索支架,使得人工拉索和线控拉索在限位拉索支架内进行水平方向的伸缩滑动;由于限位拉索支架和连接器相互独立,从而利用执行拉索支架对连接器的活动区域进行限制,保证连接器受到人工拉索或线控拉索拉动时,能独立工作。
技术特征:
1.一种自动驾驶车辆人机共驾线控停车制动装置,包括与制动器连接的执行拉索(1),其特征在于:所述执行拉索(1)远离制动器的一端连接有连接器(2),所述连接器(2)远离执行拉索(1)的一端设置有线控停车制动机构(a)和人工停车制动机构(b);
2.根据权利要求1所述的一种自动驾驶车辆人机共驾线控停车制动装置,其特征在于:所述线控执行器(a1)的顶部通过连接轴连接有上端支架(a3),所述线控执行器(a1)的输出端通过连接轴连接有下端支架(a4),所述线控拉索(a2)通过连接轴与下端支架(a4)连接,所述线控拉索(a2)靠近下端支架(a4)的表面活动套接有线控拉索支架(a5),且所述线控拉索支架(a5)与上端支架(a3)均安装在车架上。
3.根据权利要求2所述的一种自动驾驶车辆人机共驾线控停车制动装置,其特征在于:所述人工手柄(b1)靠近人工拉索(b2)的表面转动连接有安装在车架上的固定架(b3)。
4.根据权利要求3所述的一种自动驾驶车辆人机共驾线控停车制动装置,其特征在于:所述人工拉索(b2)和线控拉索(a2)分别通过连接轴与连接器(2)连接。
5.根据权利要求4所述的一种自动驾驶车辆人机共驾线控停车制动装置,其特征在于:所述人工拉索(b2)和线控拉索(a2)靠近连接器(2)处活动套接有限位拉索支架(21),所述限位拉索支架(21)安装在车架上。
6.根据权利要求5所述的一种自动驾驶车辆人机共驾线控停车制动装置,其特征在于:所述执行拉索(1)靠近连接器(2)处活动套接有执行拉索支架(11),且所述执行拉索支架(11)安装在车架上。
技术总结
本技术公开了一种自动驾驶车辆人机共驾线控停车制动装置,具体涉及车辆停车制动技术领域,包括与制动器连接的执行拉索,所述执行拉索远离制动器的一端连接有连接器,所述连接器远离执行拉索的一端设置有线控停车制动机构和人工停车制动机构;所述线控停车制动机构包括线控执行器和线控拉索,所述线控执行器和连接器分别设置在线控拉索的两端;所述人工停车制动机构包括人工手柄和人工拉索,所述人工手柄和连接器分别设置在人工拉索的两端。本技术通过人工手柄和线控执行器分别通过人工拉索和线控拉索带动连接器,从而连接器拉动执行拉索使得制动器制动;因此该设置使自动驾驶线控停车制动与人工停车制动相对独立,保证车辆制动安全。
技术研发人员:吴雁飞
受保护的技术使用者:合力工业车辆(上海)有限公司
技术研发日:20230106
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!