一种侦查机器人的行走机构的制作方法
本技术涉及机器人,具体为一种侦查机器人的行走机构。
背景技术:
1、机器人是一种能够半自主或全自主工作的智能机器。机器人能够通过编程和自动控制来执行诸如作业或移动等任务。机器人具有感知、决策、执行等基本特征,可以辅助甚至替代人类完成危险、繁重、复杂的工作,提高工作效率与质量,服务人类生活,扩大或延伸人的活动及能力范围。侦查机器人是机器人中的一种,侦查机器人的行走需要借助到行走机构,侦查机器人的规格多种多样,为保证侦查机器人的稳定性,需要对行走机构前轮和后轮之间的距离进行调整,也就使得行走机构多种多样,一种侦查机器人对应一种行走机构,使得行走机构的通用性较差,也增加了企业的生产成本,为此,我们提出一种侦查机器人的行走机构。
技术实现思路
1、本实用新型要解决的技术问题是克服现有的缺陷,提供一种侦查机器人的行走机构,能够根据侦查机器人的具体情况调节后轮与前轮之间的距离,能够适用于不同类型的侦查机器人,通用性较高,适用性较强,可以有效解决背景技术中的问题。
2、为实现上述目的,本实用新型提供如下技术方案:一种侦查机器人的行走机构,包括行走底板;
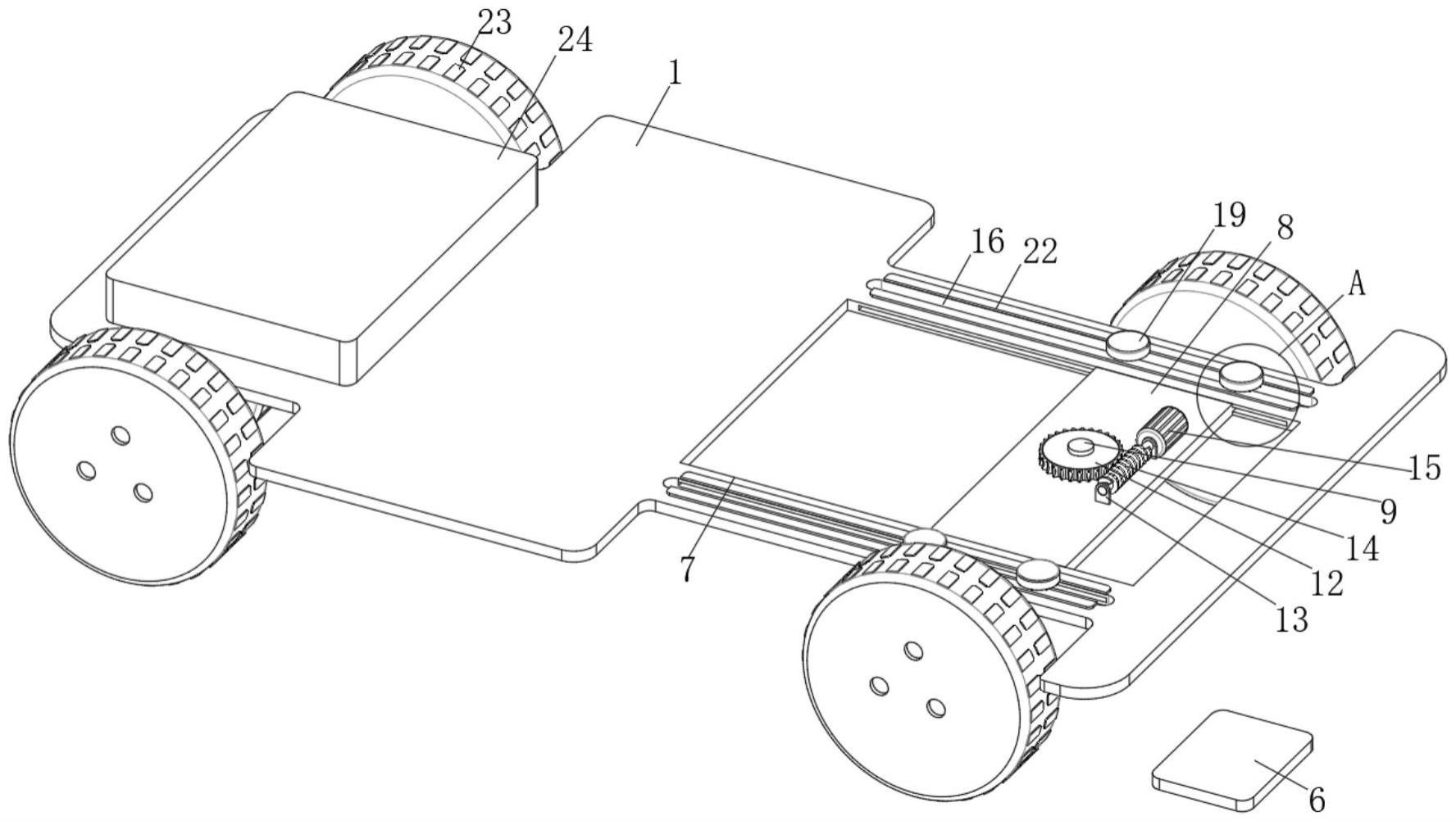
3、行走底板:其下端左侧对称设置有安装座,安装座的内部均通过销轴转动连接有后轮,行走底板的下端对称设置有固定座,两个固定座之间设置有双轴电机,双轴电机的输出轴的相背离外侧端分别与相邻的销轴固定连接,双轴电机的输出轴分别与相邻的固定座内部的转孔转动连接,行走底板的内部开设有滑槽,滑槽的内部滑动连接有支撑板,支撑板的内部通过轴承一转动连接有转轴,转轴的下端通过连接杆连接有连接轴,连接轴的相背离外侧端均通过轴承二转动连接有前轮;
4、其中:还包括控制开关组,所述控制开关组位于行走底板的外部,行走底板的上端设置有蓄电池,控制开关组的输入端电连接蓄电池的输出端,双轴电机的输入端电连接控制开关组的输出端,能够根据侦查机器人的具体情况调节后轮与前轮之间的距离,能够适用于不同类型的侦查机器人,通用性较高,适用性较强,应用范围较广。
5、进一步的,所述转轴的外弧面上侧设置有涡轮,支撑板的上端对称设置有立板,两个立板之间通过轴承三转动连接有蜗杆,蜗杆与涡轮啮合连接,能够带动转轴转动。
6、进一步的,还包括电机,所述电机设置于后侧的立板的后端,电机的输出轴前端与蜗杆的后端固定连接,电机的输入端电连接控制开关组的输出端,能够带动蜗杆运转。
7、进一步的,所述行走底板的内部对称开设有条形孔,条形孔均与滑槽相连通,支撑板的前后两端均设置有连接板,连接板分别位于相邻的条形孔的内部,连接板内部的圆孔内均插接有螺杆,螺杆的上端均设置有盖板,螺杆的外弧面下侧均螺纹连接有螺母,螺母与行走底板配合安装,能够对支撑板进行固定。
8、进一步的,所述盖板的直径大于条形孔的宽度,确保盖板能够对支撑板进行固定。
9、进一步的,所述盖板的下端均设置有防滑纹,行走底板的上端分别设置有与条形孔位置对应的橡胶垫,防滑纹与橡胶垫配合安装,确保支撑板的固定效果。
10、进一步的,所述后轮和前轮的外弧面均设置有防滑凸块,确保侦查机器人的行走效果。
11、与现有技术相比,本实用新型的有益效果是:本侦查机器人的行走机构,具有以下好处:
12、面对不同型号的侦查机器人时,根据侦查机器人的具体情况调节后轮和前轮之间的距离,推动支撑板在滑槽的内部滑动,即可对后轮和前轮之间的距离进行调节,调节完毕后,在连接板内部的圆孔内插入螺杆,在螺杆的下侧螺纹连接螺母,螺母的扳拧面对边距离大于条形孔的宽度,即可使盖板和螺母与行走底板压紧,即可对支撑板的位置进行固定,通过设置防滑纹与橡胶垫,增加了盖板与行走底板之间的摩擦力,确保了支撑板的固定效果,进而对后轮和前轮之间的距离进行固定,使得本侦查机器人的行走机构,能够适用于不同类型的侦查机器人,通用性较高,在侦查环境中适用性较强,应用范围较广。
技术特征:
1.一种侦查机器人的行走机构,其特征在于:包括行走底板(1);
2.根据权利要求1所述的一种侦查机器人的行走机构,其特征在于:所述转轴(9)的外弧面上侧设置有涡轮(12),支撑板(8)的上端对称设置有立板(13),两个立板(13)之间通过轴承三转动连接有蜗杆(14),蜗杆(14)与涡轮(12)啮合连接。
3.根据权利要求2所述的一种侦查机器人的行走机构,其特征在于:还包括电机(15),所述电机(15)设置于后侧的立板(13)的后端,电机(15)的输出轴前端与蜗杆(14)的后端固定连接,电机(15)的输入端电连接控制开关组(6)的输出端。
4.根据权利要求1所述的一种侦查机器人的行走机构,其特征在于:所述行走底板(1)的内部对称开设有条形孔(16),条形孔(16)均与滑槽(7)相连通,支撑板(8)的前后两端均设置有连接板(17),连接板(17)分别位于相邻的条形孔(16)的内部,连接板(17)内部的圆孔内均插接有螺杆(18),螺杆(18)的上端均设置有盖板(19),螺杆(18)的外弧面下侧均螺纹连接有螺母(20),螺母(20)与行走底板(1)配合安装。
5.根据权利要求4所述的一种侦查机器人的行走机构,其特征在于:所述盖板(19)的直径大于条形孔(16)的宽度。
6.根据权利要求4所述的一种侦查机器人的行走机构,其特征在于:所述盖板(19)的下端均设置有防滑纹(21),行走底板(1)的上端分别设置有与条形孔(16)位置对应的橡胶垫(22),防滑纹(21)与橡胶垫(22)配合安装。
7.根据权利要求1所述的一种侦查机器人的行走机构,其特征在于:所述后轮(3)和前轮的外弧面均设置有防滑凸块(23)。
技术总结
本技术公开了一种侦查机器人的行走机构,包括行走底板;行走底板:其下端左侧对称设置有安装座,安装座的内部均通过销轴转动连接有后轮,行走底板的下端对称设置有固定座,两个固定座之间设置有双轴电机,双轴电机的输出轴的相背离外侧端分别与相邻的销轴固定连接,双轴电机的输出轴分别与相邻的固定座内部的转孔转动连接,行走底板的内部开设有滑槽,滑槽的内部滑动连接有支撑板,支撑板的内部通过轴承一转动连接有转轴,本侦查机器人的行走机构,能够根据侦查机器人的具体情况调节后轮与前轮之间的距离,能够适用于不同类型的侦查机器人,通用性较高,适用性较强,应用范围较广。
技术研发人员:梁午昶
受保护的技术使用者:安翼机器人(江苏)有限公司
技术研发日:20230216
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!