一种全向移动机器人驱动轮垂直减震机构及机器人的制作方法
本技术主要涉及机器人相关,具体是一种全向移动机器人驱动轮垂直减震机构及机器人。
背景技术:
1、当前主要用于巡检、运维、应急、消防、搬运等使用的全向移动机器人主要包括底盘、设置于底盘下的驱动轮,设置于底盘上的检测传感器等。
2、当前,全向移动机器人领域主要采用平行四边形结构形式的减震系统,驱动轮在原地回转时,轮地接触点与回转轴线有一定距离,导致在回转时轮胎磨损严重,同时需要较大的回转力矩才能实现驱动轮原地回转。因此上述结构的全向移动机器人对于不平路面、转弯或某些障碍物时磨损大、通过能力有限。
技术实现思路
1、为解决目前技术的不足,本实用新型结合现有技术,从实际应用出发,提供一种全向移动机器人驱动轮垂直减震机构以及机器人,通过将导向结构与减震结构相结合,减少驱动轮原地回转阻力,降低原地回转时驱动轮与地面的摩擦。
2、本实用新型的技术方案如下:
3、根据本实用新型的其中一个方面,提供一种全向移动机器人驱动轮垂直减震机构,包括驱动轮回转组件、驱动轮导向减震组件以及驱动轮,
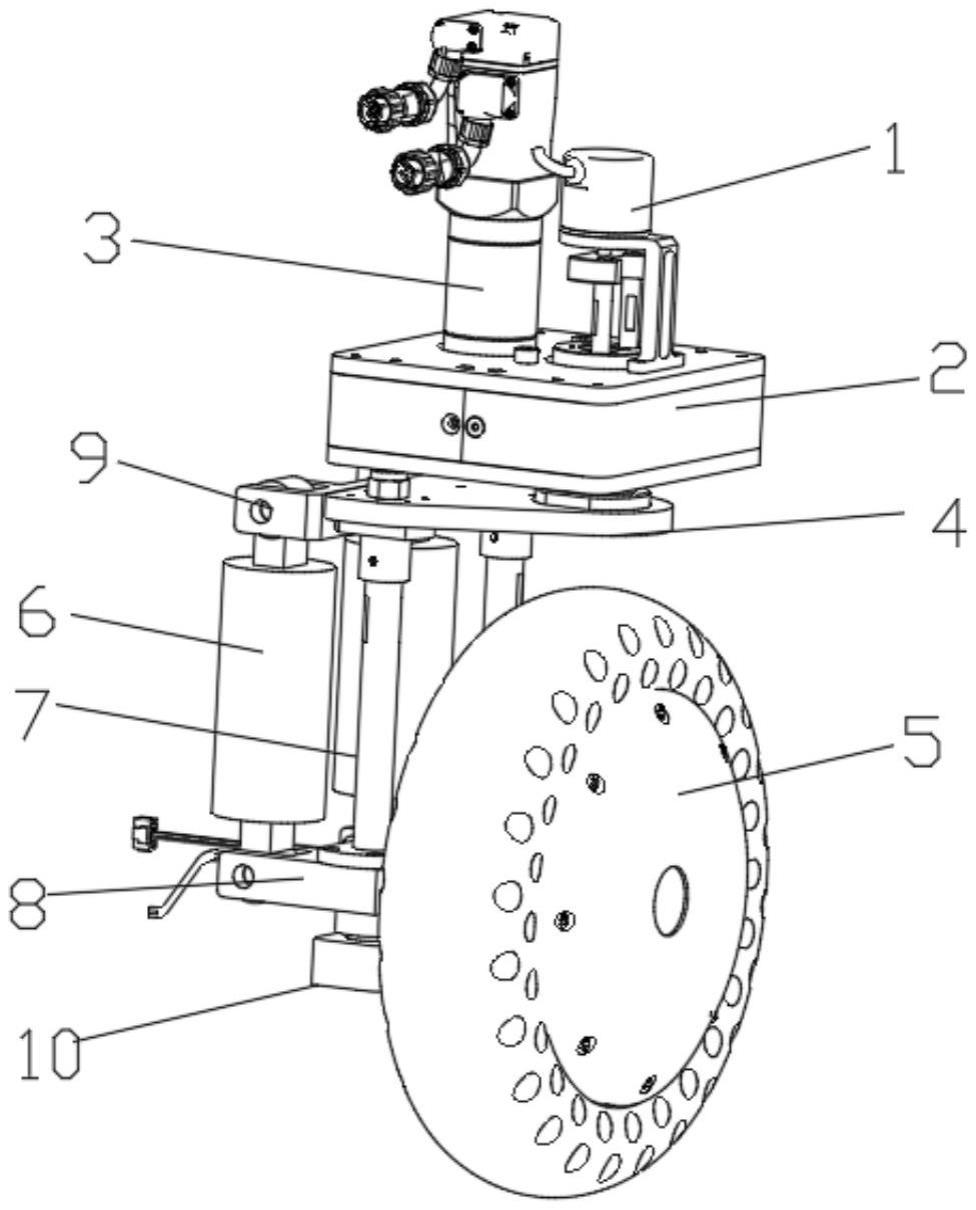
4、所述驱动轮回转组件上端用于安装在底盘本体上,下端通过回转轴与驱动轮导向减震组件连接,驱动轮回转组件包括驱动电机、减速齿轮箱以及回转轴;
5、所述导向减震组件包括上支撑板、驱动轮安装板、减震器、滑动轴承、导向轴,所述上支撑板与回转轴固定连接,所述驱动轮安装板连接于驱动轮,所述滑动轴承安装于驱动轮安装板,所述减震器两端分别固定于上支撑板以及驱动轮安装板,所述导向轴一端固定连接于上支撑板,另一端与所述滑动轴承滑动配合;
6、所述驱动轮与地面接触点处于所述回转轴的轴线上。
7、进一步,所述驱动轮安装板设置于所述驱动轮中心端面一侧,驱动轮安装板与所述驱动轮的轮轴固定连接,所述减震器设置于所述导向轴外侧。
8、进一步,所述导向轴为两个,两个导向轴在驱动轮中心两侧对称设置,所述减震器为两个,两个减震器在驱动轮中心两侧对称设置。
9、进一步,所述导向轴下端穿过所述滑动轴承并连接有限位挡板,所述限位挡板位于所述驱动轮安装板下方。
10、进一步,所述上支撑板以及驱动轮安装板上均设有连接耳部,所述减震器两端安装于对应的连接耳部。
11、进一步,所述驱动轮回转组件还包括角度传感器,所述角度传感器安装于所述减速齿轮箱上,所述角度传感器连接于回转轴用于测量回转轴转动角度。
12、根据本实用新型另一方面,提供一种机器人,所述机器人包括底盘本体,所述底盘本体的四角处分别安装有一个上述的全向移动机器人驱动轮垂直减震机构。
13、进一步,所述驱动轮为轮毂电机或其它形式的动力轮。
14、进一步,所述机器人包括检测组件、云台、升降杆、激光导航传感器以及gps导航传感器;
15、所述检测组件、云台、升降杆依次固定连接后安装在底盘本体上,激光导航传感器以及gps导航传感器均安装于底盘本体,底盘本体内部容纳控制单元、通讯单元、电池。
16、本实用新型的有益效果:
17、本实用新型通过四组回转驱动轮组的组合运动实现机器人全向运动,每组回转驱动轮组均具有独立减震功能,机器人在运动过程中,回转驱动轮组分别原地回转,通过导向轴确保轮地接触点位于回转轴线上,同时限制减震器只在垂直方向具有减震作用,减少驱动轮与地面的摩擦及驱动轮原地回转阻力,同时在四组独立减震器作用下,四组驱动轮均与地面接触,提高了整个机器人的运动性能,减少地面不平对底盘上部零部件的冲击。
技术特征:
1.一种全向移动机器人驱动轮垂直减震机构,包括驱动轮回转组件、驱动轮导向减震组件以及驱动轮,其特征在于,
2.根据权利要求1所述的一种全向移动机器人驱动轮垂直减震机构,其特征在于,所述驱动轮安装板设置于所述驱动轮中心端面一侧,驱动轮安装板与所述驱动轮的轮轴固定连接,所述减震器设置于所述导向轴外侧。
3.根据权利要求1所述的一种全向移动机器人驱动轮垂直减震机构,其特征在于,所述导向轴为两个,两个导向轴在驱动轮中心两侧对称设置,所述减震器为两个,两个减震器在驱动轮中心两侧对称设置。
4.根据权利要求1所述的一种全向移动机器人驱动轮垂直减震机构,其特征在于,所述导向轴下端穿过所述滑动轴承并连接有限位挡板,所述限位挡板位于所述驱动轮安装板下方。
5.根据权利要求1所述的一种全向移动机器人驱动轮垂直减震机构,其特征在于,所述上支撑板以及驱动轮安装板上均设有连接耳部,所述减震器两端安装于对应的连接耳部。
6.根据权利要求1所述的一种全向移动机器人驱动轮垂直减震机构,其特征在于,所述驱动轮回转组件还包括角度传感器,所述角度传感器安装于所述减速齿轮箱上,所述角度传感器连接于回转轴用于测量回转轴转动角度。
7.一种机器人,其特征在于,所述机器人包括底盘本体,所述底盘本体的四角处分别安装有一个权利要求1-6任一项所述的全向移动机器人驱动轮垂直减震机构。
8.根据权利要求7所述的机器人,其特征在于,所述驱动轮为轮毂电机。
9.根据权利要求7所述的机器人,其特征在于,所述机器人包括检测组件、云台、升降杆、激光导航传感器以及gps导航传感器;
技术总结
本技术提供一种全向移动机器人驱动轮垂直减震机构及机器人,减震机构包括驱动轮回转组件、驱动轮导向减震组件以及驱动轮,驱动轮回转组件包括驱动电机、减速齿轮箱以及回转轴;所述导向减震组件包括上支撑板、驱动轮安装板、减震器、滑动轴承、导向轴,所述上支撑板与回转轴固定连接,所述驱动轮安装板连接于驱动轮,所述滑动轴承安装于驱动轮安装板,所述减震器两端分别固定于上支撑板以及驱动轮安装板,所述导向轴一端固定连接于上支撑板,另一端与所述滑动轴承滑动配合;所述驱动轮与地面接触点处于所述回转轴的轴线上。本技术通过将导向结构与减震结构相结合,减少驱动轮原地回转阻力,降低原地回转时驱动轮与地面的摩擦。
技术研发人员:车现发,田忠超,付延召,程广军
受保护的技术使用者:艾默斯(济南)机器人科技有限公司
技术研发日:20230314
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!