无人驾驶皮卡汽车的传感结构及汽车的制作方法
本技术涉及汽车传感器组件,特别涉及一种无人驾驶皮卡汽车的传感结构。本技术还涉及一种设有该传感结构的无人驾驶皮卡汽车。
背景技术:
1、车载传感器是汽车计算机系统的输入装置,主要通过车载传感器采集周围环境信息,并把汽车运行中各种工况信息,如车速、各种介质的温度、发动机运转工况等转化为电信号输送给计算机,从而自动规划和控制汽车行驶路线。在现有技术中,罩设在传感器外的壳体通常是由多块钣金件焊接或粘接而成的,拆卸起来十分困难,不便于操作人员对壳体内部的传感器进行维修和更换,并且拆卸过程中壳体会受到损坏,增加了传感器的维修成本。
2、此外,现有的车载传感器种类较多,例如采用光学和红外摄像机、激光、超声波和雷达等传感器,由于现有传感器的种类不同,如雷达和激光传感器能够360°旋转探测,而光学和红外摄像机大多为固定拍摄广角,需要通过旋转机构连接到车身上。现有的旋转机构大多较为复杂,不易拆卸,且传感器易受到外部环境污染而影响探测结果。
技术实现思路
1、有鉴于此,本实用新型旨在提出一种无人驾驶皮卡汽车的传感结构,以便于不同种类车载传感器的安装和拆卸,以降低维修成本,还能够对传感器进行清洁。
2、为达到上述目的,本实用新型的技术方案是这样实现的:
3、一种无人驾驶皮卡汽车的传感结构,包括设于驾驶舱顶部的第一传感组件和清洁单元,以及设于前保险杠和/或货箱后端的第二传感组件;
4、所述第一传感组件包括第一安装座,第一传感器通过第一安装部安装在所述第一安装座上,且按压所述第一安装部时,所述第一传感器能够被锁止在所述第一安装座上,继续按压所述第一安装部时,能够解锁所述第一传感器;
5、所述清洁单元具有被第一驱动部驱动地沿所述第一安装座的轴心旋转的工作端,且所述工作端用于清洁所述第一传感器;
6、所述第二传感组件包括第二安装座,第二传感器通过第二安装部可拆卸地安装在所述第二安装座上;所述第二传感组件通过第二驱动部的驱动而旋转预设角度。
7、进一步的,所述第一安装座包括安装主体,以及设于所述安装主体上的第一弹性部和第二弹性部,所述第一弹性部间隔设置在所述第二弹性部外侧;
8、沿所述第一安装座高度方向,所述第一弹性部与所述第二弹性部之间具有容纳空间,被按压的所述第一安装部能够卡接在所述容纳空间内,以锁止所述第一安装部。
9、进一步的,所述第一安装部包括本体,以及连接在所述本体上的锁止部;
10、所述第一传感组件锁止时,所述锁止部卡接在所述容纳空间内,且所述本体抵接在所述第一弹性部上,所述锁止部抵接在所述第二弹性部上,以限制所述第一安装部的位移。
11、进一步的,所述第一弹性部具有向所述第二弹性部一侧延伸的翻边,且所述第二弹性部靠近所述第一弹性部的一端具有弯折部;
12、所述锁止部能够抵接在所述翻边与所述弯折部之间,并使所述第一安装部被锁止;
13、继续按压所述锁止部使所述弯折部弹性蓄能,且所述弯折部释能,能够通过所述弯折部驱动所述锁止部脱离所述翻边。
14、进一步的,所述第一传感组件上设有定位块,所述第一安装部上设有定位槽;
15、所述第一安装部被锁止时,所述定位块位于所述定位槽内,并用于限制所述第一安装部的转动。
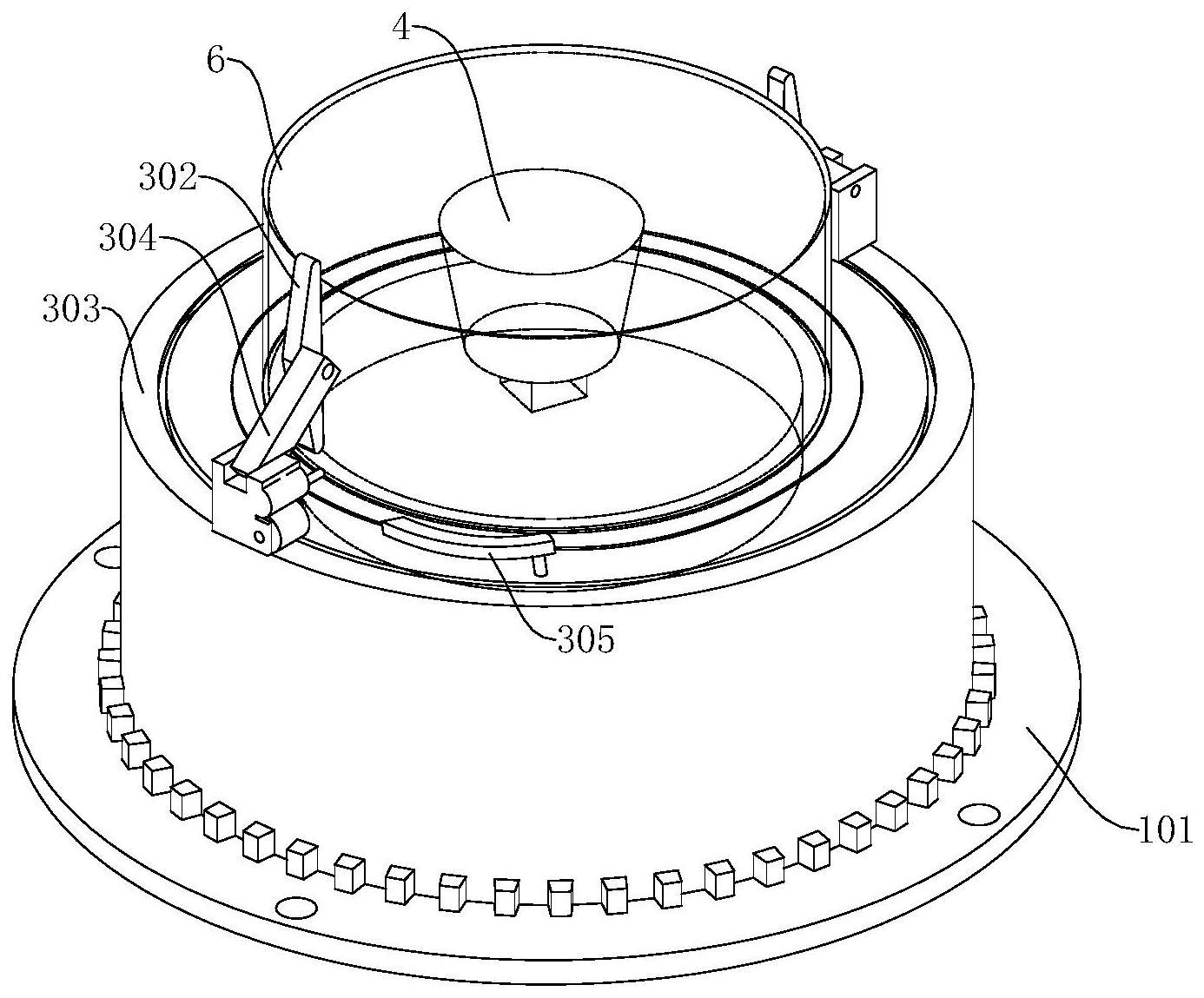
16、进一步的,所述清洁单元包括支撑部,以及枢转设于所述支撑部上端的清洁部;
17、所述支撑部套设在所述第一安装座上,所述第一驱动部驱使所述支撑部沿所述第一安装座的轴心旋转;所述清洁部在自然状态下具有第一形态,因驱动所述支撑部旋转,所述清洁部切换为第二形态;
18、且因切换所述支撑部的旋转方向,以使所述清洁部由所述第二形态切换为所述第一形态。
19、进一步的,所述清洁部包括支座以及设于所述支座上的刮板,所述第一安装部上端设有驱动块,所述驱动块沿所述第一安装部的高度方向倾斜向上;
20、所述支座铰接在所述支撑部上,且所述支座上设有驱动臂;
21、所述支撑部旋转时,所述驱动臂抵接在所述驱动块上,以使所述支座翻转,而形成所述第二形态。
22、进一步的,所述第二传感组件还包括推动块以及设于所述第二安装座上的锁止件;
23、所述推动块设于所述第二驱动部动力输出端,所述锁止件被所述推动块顶推而卡接在所述第二安装座和所述第二安装部之间锁止。
24、相对于现有技术,本实用新型具有以下优势:
25、本实用新型所述的无人驾驶皮卡汽车的传感结构,通过设置第一传感组件和第二传感组件,使设于驾驶舱顶部的第一传感器和前保险杠和/或货箱后端的第二传感器便于拆装,从而降低维修成本。并通过设置清洁单元对易受污染的第一传感器进行清洁,提高传感器的传感效果。
26、此外,通过在安装本体上的设置容纳空间,使被按压的第一安装座锁止在容纳空间内,使第一传感器的安装更加便捷,结构简单。并通过在第一安装部上设置本体以及锁止部,在第一传感组件锁止时,本体与第一弹性部抵接,锁止部与第二弹性部抵接,从而限制第一安装部的位移,提高锁止效果。
27、另外,通过在第一弹性部设置翻边,便于第一安装部的锁止。并且,在第二弹性部上设置弯折部,通过按压使弯折部蓄能,而便于第一安装部脱离锁止。通过在第一传感组件上设置定位块和定位槽,能够进一步保证第一传感器的锁止效果。
28、并且,通过设置驱动块和驱动臂,能够使清洁部在需要清洁的时候翻转,以清洁第一传感器。使清洁部在不需清洁时,平行设于支撑部上,从而避免第一传感器的视角盲区。
29、本实用新型的另一目的在于提出一种无人驾驶皮卡汽车,该无人驾驶皮卡汽车上设有如上所述的无人驾驶皮卡汽车的传感结构。
30、本实用新型的无人驾驶皮卡汽车,通过采用如上所述的传感结构,能够便于汽车上传感器的拆卸和安装,提高客户使用便捷性。
技术特征:
1.一种无人驾驶皮卡汽车的传感结构,其特征在于:
2.根据权利要求1所述的无人驾驶皮卡汽车的传感结构,其特征在于:
3.根据权利要求2所述的无人驾驶皮卡汽车的传感结构,其特征在于:
4.根据权利要求3所述的无人驾驶皮卡汽车的传感结构,其特征在于:
5.根据权利要求1所述的无人驾驶皮卡汽车的传感结构,其特征在于:
6.根据权利要求5所述的无人驾驶皮卡汽车的传感结构,其特征在于:
7.根据权利要求6所述的无人驾驶皮卡汽车的传感结构,其特征在于:
8.根据权利要求1所述的无人驾驶皮卡汽车的传感结构,其特征在于:
9.一种无人驾驶皮卡汽车,其特征在于:
技术总结
本技术提供一种无人驾驶皮卡汽车的传感结构及汽车,该传感结构包括设于驾驶舱顶部的第一传感组件和清洁单元,以及设于前保险杠和/或货箱后端的第二传感组件。第一传感组件包括第一安装座,第一传感器通过第一安装部安装在第一安装座上,且按压第一安装部时,第一传感器能够被锁止在第一安装座上,继续按压第一安装部时,能够解锁第一传感器。清洁单元具有工作端,且工作端用于清洁第一传感器。第二传感组件包括第二安装座,第二传感器通过第二安装部可拆卸地安装在第二安装座上;第二传感组件通过第二驱动部的驱动而旋转预设角度。本技术的无人驾驶皮卡汽车的传感结构,便于不同种类车载传感器的安装和拆卸,以降低维修成本。
技术研发人员:马冀川,焦伟周,耿颖璞,张宇腾,宋迎涛,左国政,赵建新,陈士姣,张岩,胡莎莎,王豪
受保护的技术使用者:保定市长城蚂蚁物流有限公司
技术研发日:20230328
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!