一种人工智能机器人行走机构的制作方法
本技术涉及机械设备,具体涉及一种人工智能机器人行走机构。
背景技术:
1、机器人是按照既定程序,执行相应任务的智能化机械设备。它可以接受人类指挥,可以协助或取代人类的工作,也可以根据以人工智能技术制定的规则来运行,在生产、建筑、服务等行业都可以发挥重要作用。随着科技的不断发展,以及人口红利的减退,人工成本越来越高,为了节约成本和提高生产效率,越来越多的企业进行生产转型,启动自动化设备来代替现有的人工操作;自动化操作不仅可以减少人工成本的支出,提高生产的效率,提高产品的质量,还有利于生产的管理。针对现有技术存在以下问题:
2、1、现有的人工智能机器人行走机构,不具备缓冲装置,当机器人在路面不平整的地方行走时,无法减少不平整路面对机器人所产生的晃动,实用性较差;
3、2、现有的人工智能机器人行走机构,在进行安装时,操作难度较大,安装起来较为麻烦,并且工作效率较低,实用性较差。
技术实现思路
1、为解决上述技术问题,本实用新型所采用的技术方案是:
2、一种人工智能机器人行走机构,包括主体,所述主体的上端设置有缓冲装置,所述缓冲装置的上端设置有便于安装装置,所述主体的前端设置有刹车机构,所述主体的下端设置有驱动装置,所述驱动装置的一侧设置有车轮,所述车轮的一侧设置有挡板。
3、本实用新型技术方案的进一步改进在于:所述缓冲装置包括第一连接杆、连接轴、第二连接杆、连接轴二、活动块、缓冲弹簧,所述第一连接杆位于连接轴的后端,第二连接杆位于连接轴的前端,所述连接轴二位于第二连接杆的一侧,所述活动块位于连接轴二的后端,所述缓冲弹簧位于活动块的一侧。
4、本实用新型技术方案的进一步改进在于:所述第一连接杆的前端与连接轴的后端活动连接,所述活动块的一侧与缓冲弹簧的一侧弹性连接。
5、本实用新型技术方案的进一步改进在于:所述便于安装装置包括固定板、固定螺栓、螺纹槽、螺纹连接块、连接板、加固板,所述固定螺栓贯穿于固定板的一侧中间部位,所述螺纹槽位于固定板的内壁,所述螺纹连接块位于螺纹槽的下端,所述连接板位于螺纹连接块的下端,所述加固板位于连接板的前端。
6、本实用新型技术方案的进一步改进在于:所述螺纹槽的内壁与螺纹连接块的上端外表面活动连接,所述螺纹连接块的下端与连接板的上端固定连接,所述连接板的前端与加固板的后端固定连接。
7、本实用新型技术方案的进一步改进在于:所述驱动装置包括驱动电机、转动轴、横向卡齿、竖向卡齿、传动轴,所述转动轴位于驱动电机的下端,所述横向卡齿位于转动轴的下端,所述传动轴位于横向卡齿的下端,所述传动轴内接于竖向卡齿的内壁。
8、本实用新型技术方案的进一步改进在于:所述驱动电机的下端与转动轴的上端固定连接,所述横向卡齿的一侧与竖向卡齿的上端活动连接,所述竖向卡齿的内壁与传动轴的外表面固定连接。
9、由于采用了上述技术方案,本实用新型相对现有技术来说,取得的技术进步是:
10、本实用新型提供一种人工智能机器人行走机构,通过第一连接杆、连接轴、第二连接杆、连接轴二、活动块、缓冲弹簧的共同作用下,可以使得此人工智能机器人行走机构在行走期间碰到不平整路段时,能够有效的减小所带来的晃动,实用性较好,当机器人进行行走通过不平整路段时,第一连接杆与第二连接杆则会通过连接轴进行向上活动,从而带动活动块向右移动,此时缓冲弹簧则会进行缓冲工作。
11、本实用新型提供一种人工智能机器人行走机构,通过固定板、固定螺栓、螺纹槽、螺纹连接块、连接板、加固板的共同作用下,可以使得此人工智能机器人行走机构在进行安装时,能够快速的进行安装好,并且操作较为简单,实用性较好,通过将螺纹连接块拧进螺纹槽中,并拧紧,此时再通过固定螺栓将固定板进一步固定,并通过螺栓将加固板的两端分别固定在固定板以及连接板上。
12、本实用新型提供一种人工智能机器人行走机构,通过驱动电机、转动轴、横向卡齿、竖向卡齿、传动轴的共同作用下,可以使得此人工智能机器人行走机构在进行运作时,能够有效的提高工作效率,并且实用性较好,通过驱动电机提供动力,从而带动转动轴开始转动,因为横向卡齿与转动轴固定连接,从而带动横向卡齿转动,此时竖向卡齿则会开始转动,从而带动竖向卡齿开始转动,并且传动轴则会随着竖向卡齿的转动进行传动。
技术特征:
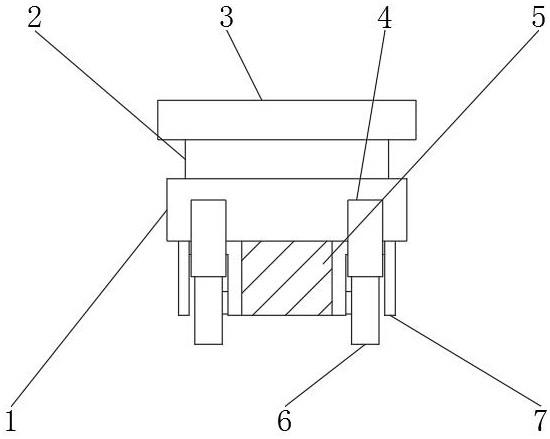
1.一种人工智能机器人行走机构,包括主体(1),其特征在于:所述主体(1)的上端设置有缓冲装置(2),所述缓冲装置(2)的上端设置有便于安装装置(3),所述主体(1)的前端设置有刹车机构(4),所述主体(1)的下端设置有驱动装置(5),所述驱动装置(5)的一侧设置有车轮(6),所述车轮(6)的一侧设置有挡板(7)。
2.根据权利要求1所述的一种人工智能机器人行走机构,其特征在于:所述缓冲装置(2)包括第一连接杆(21)、连接轴(22)、第二连接杆(23)、连接轴二(24)、活动块(25)、缓冲弹簧(26),所述第一连接杆(21)位于连接轴(22)的后端,第二连接杆(23)位于连接轴(22)的前端,所述连接轴二(24)位于第二连接杆(23)的一侧,所述活动块(25)位于连接轴二(24)的后端,所述缓冲弹簧(26)位于活动块(25)的一侧。
3.根据权利要求2所述的一种人工智能机器人行走机构,其特征在于:所述第一连接杆(21)的前端与连接轴(22)的后端活动连接,所述活动块(25)的一侧与缓冲弹簧(26)的一侧弹性连接。
4.根据权利要求1所述的一种人工智能机器人行走机构,其特征在于:所述便于安装装置(3)包括固定板(31)、固定螺栓(32)、螺纹槽(33)、螺纹连接块(34)、连接板(35)、加固板(36),所述固定螺栓(32)贯穿于固定板(31)的一侧中间部位,所述螺纹槽(33)位于固定板(31)的内壁,所述螺纹连接块(34)位于螺纹槽(33)的下端,所述连接板(35)位于螺纹连接块(34)的下端,所述加固板(36)位于连接板(35)的前端。
5.根据权利要求4所述的一种人工智能机器人行走机构,其特征在于:所述螺纹槽(33)的内壁与螺纹连接块(34)的上端外表面活动连接,所述螺纹连接块(34)的下端与连接板(35)的上端固定连接,所述连接板(35)的前端与加固板(36)的后端固定连接。
6.根据权利要求1所述的一种人工智能机器人行走机构,其特征在于:所述驱动装置(5)包括驱动电机(51)、转动轴(52)、横向卡齿(53)、竖向卡齿(54)、传动轴(55),所述转动轴(52)位于驱动电机(51)的下端,所述横向卡齿(53)位于转动轴(52)的下端,所述传动轴(55)位于横向卡齿(53)的下端,所述传动轴(55)内接于竖向卡齿(54)的内壁。
7.根据权利要求6所述的一种人工智能机器人行走机构,其特征在于:所述驱动电机(51)的下端与转动轴(52)的上端固定连接,所述横向卡齿(53)的一侧与竖向卡齿(54)的上端活动连接,所述竖向卡齿(54)的内壁与传动轴(55)的外表面固定连接。
技术总结
本技术公开了一种人工智能机器人行走机构,涉及机械设备技术领域,包括主体,所述主体的上端设置有缓冲装置,所述缓冲装置的上端设置有便于安装装置,所述主体的前端设置有刹车机构,所述主体的下端设置有驱动装置,所述驱动装置的一侧设置有车轮,所述车轮的一侧设置有挡板。本技术通过第一连接杆、连接轴、第二连接杆、连接轴二、活动块、缓冲弹簧的共同作用下,可以使得此人工智能机器人行走机构在行走期间碰到不平整路段时,能够有效的减小所带来的晃动,通过固定板、固定螺栓、螺纹槽、螺纹连接块、连接板、加固板的共同作用下,可以使得此人工智能机器人行走机构在进行安装时,能够快速的进行安装好,并且操作较为简单。
技术研发人员:弭吉荣
受保护的技术使用者:山东深卓信息科技有限公司
技术研发日:20230525
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!