一种具备液压升降平台的履带行走机器人的制作方法
本技术涉及履带机器人,尤其涉及一种具备液压升降平台的履带行走机器人。
背景技术:
1、履带式机器人,主要指搭载履带底盘机构的机器人,履带移动机器人具有牵引力大、不易打滑、越野性能好等优点,搭配液压升降平台,便于实现不同高度的工作。
2、液压升降平台在进行升降移动时,仅仅通过底部的履带起到支撑的作用,因此整个装置的稳定性较差,在实际使用过程中,容易侧翻,具有一定的安全隐患。
技术实现思路
1、本实用新型解决的问题在于提供一种具备液压升降平台的履带行走机器人,解决了液压升降平台在进行升降移动时,仅仅通过底部的履带起到支撑的作用,因此整个装置的稳定性较差,在实际使用过程中,容易侧翻,具有一定的安全隐患的技术问题。
2、为了实现上述目的,本实用新型采用了如下技术方案:
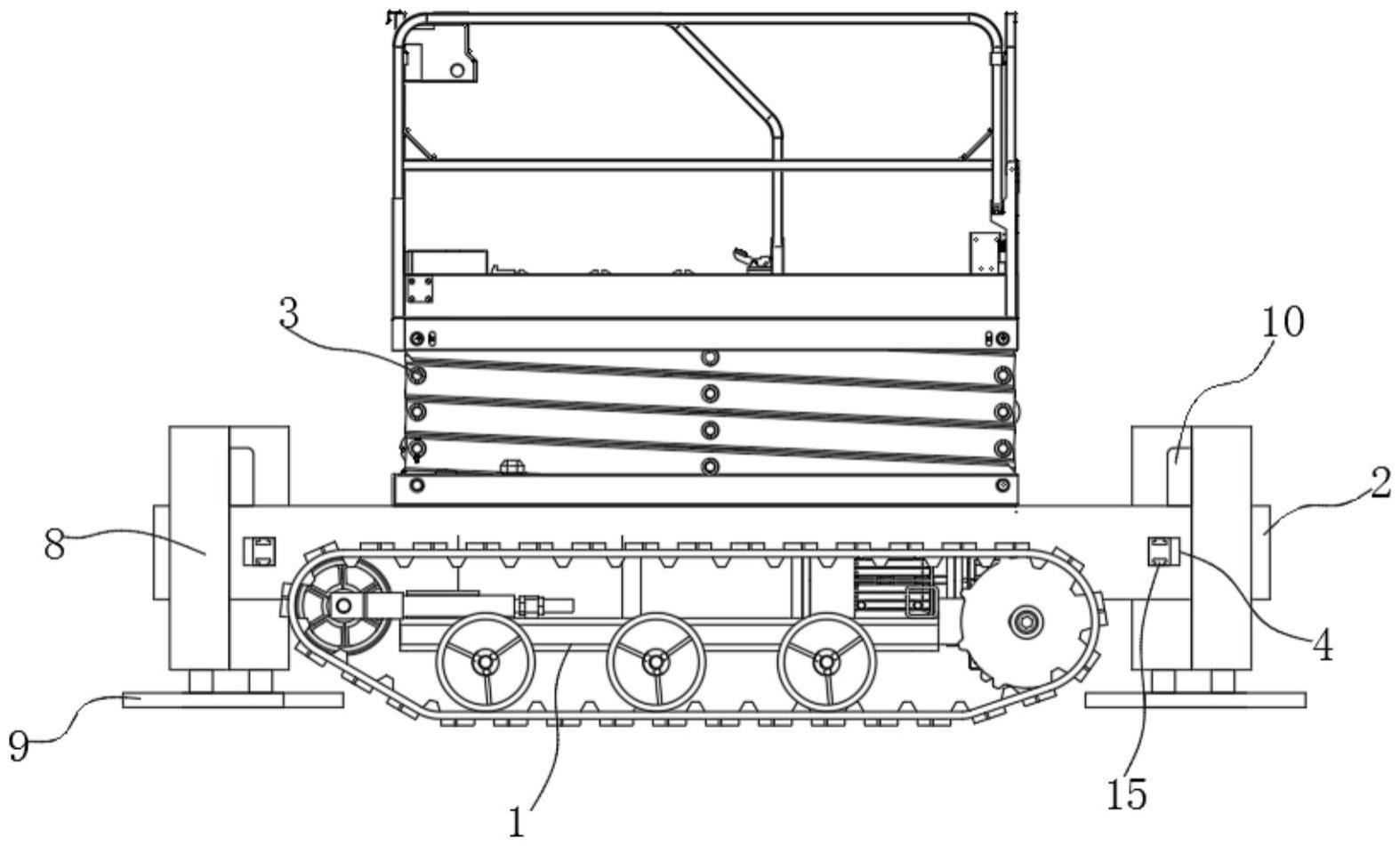
3、一种具备液压升降平台的履带行走机器人,包括履带车、支撑台和液压升降平台,所述履带车顶侧安装有支撑台,所述支撑台顶侧安装有液压升降平台,所述支撑台两端均开设有两个滑槽,所述滑槽内滑动安装有支撑臂,且位于支撑台同端的两个支撑臂做同速反向运动,位于所述支撑台同端的两个支撑臂的端部安装有连接杆,所述连接杆上安装有液压缸,且支撑台同端的两个液压缸分别位于支撑台的相对侧,所述液压缸底部伸缩端安装有支撑座。
4、优选的,所述滑槽内部设置有导块,所述支撑臂外侧设置有与导块适配的导槽。
5、优选的,所述支撑台顶侧两端均安装有电机,所述电机输出端通过转轴安装有转齿。
6、优选的,所述支撑臂侧壁设置有齿条,且齿条与转齿啮合。
7、优选的,所述连接杆端部设置有环箍,且液压缸安装在环箍内。
8、本实用新型的有益效果是:履带车上的液压升降平台进行升降时,通过电机工作实现支撑臂的移动,将支撑臂移出支撑台处于展开状态,通过液压缸工作带动支撑座下移,直至支撑座与地面接触,增大与地面的接触面积,提高整体支撑的稳定性。
技术特征:
1.一种具备液压升降平台的履带行走机器人,其特征在于,包括履带车(1)、支撑台(2)和液压升降平台(3),所述履带车(1)顶侧安装有支撑台(2),所述支撑台(2)顶侧安装有液压升降平台(3),所述支撑台(2)两端均开设有两个滑槽(4),所述滑槽(4)内滑动安装有支撑臂(5),且位于支撑台(2)同端的两个支撑臂(5)做同速反向运动,位于所述支撑台(2)同端的两个支撑臂(5)的端部安装有连接杆(6),所述连接杆(6)上安装有液压缸(8),且支撑台(2)同端的两个液压缸(8)分别位于支撑台(2)的相对侧,所述液压缸(8)底部伸缩端安装有支撑座(9)。
2.根据权利要求1所述的一种具备液压升降平台的履带行走机器人,其特征在于,所述滑槽(4)内部设置有导块(15),所述支撑臂(5)外侧设置有与导块(15)适配的导槽(14)。
3.根据权利要求1所述的一种具备液压升降平台的履带行走机器人,其特征在于,所述支撑台(2)顶侧两端均安装有电机(10),所述电机(10)输出端通过转轴(11)安装有转齿(12)。
4.根据权利要求3所述的一种具备液压升降平台的履带行走机器人,其特征在于,所述支撑臂(5)侧壁设置有齿条(13),且齿条(13)与转齿(12)啮合。
5.根据权利要求1所述的一种具备液压升降平台的履带行走机器人,其特征在于,所述连接杆(6)端部设置有环箍(7),且液压缸(8)安装在环箍(7)内。
技术总结
本技术涉及一种具备液压升降平台的履带行走机器人,包括履带车、支撑台和液压升降平台,所述履带车顶侧安装有支撑台,所述支撑台顶侧安装有液压升降平台,所述支撑台两端均开设有两个滑槽,所述滑槽内滑动安装有支撑臂,且位于支撑台同端的两个支撑臂做同速反向运动,位于所述支撑台同端的两个支撑臂的端部安装有连接杆,所述连接杆上安装有液压缸,且支撑台同端的两个液压缸分别位于支撑台的相对侧;履带车上的液压升降平台进行升降时,通过电机工作实现支撑臂的移动,将支撑臂移出支撑台处于展开状态,通过液压缸工作带动支撑座下移,直至支撑座与地面接触,增大与地面的接触面积,提高整体支撑的稳定性。
技术研发人员:汪沛
受保护的技术使用者:比格迪克有限公司
技术研发日:20230704
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!