一种高承重脚轮的制作方法
【】本申请涉及脚轮,尤其涉及一种高承重脚轮。
背景技术
0、
背景技术:
1、现有一篇申请号为cn113602038a,申请日为202.11.05的专利申请,其公开了一种辅助上坡的三轮脚轮结构,以解决脚轮在上坡过程中不稳定,不便于控制,但是,该专利申请采用的是大尺寸单轮与地面接触,虽然能解决简易上坡的问题,但是由于单轮的设计不易于更广泛地去分散重量,而且轮子在负载下会产生过多的应力和形变,从而降低了装置的承重能力。
技术实现思路
0、
技术实现要素:
1、本实用新型公开了一种高承重脚轮,以解决现有的脚轮结构因为采用大尺寸单轮与地面接触而使承重能力降低的问题。
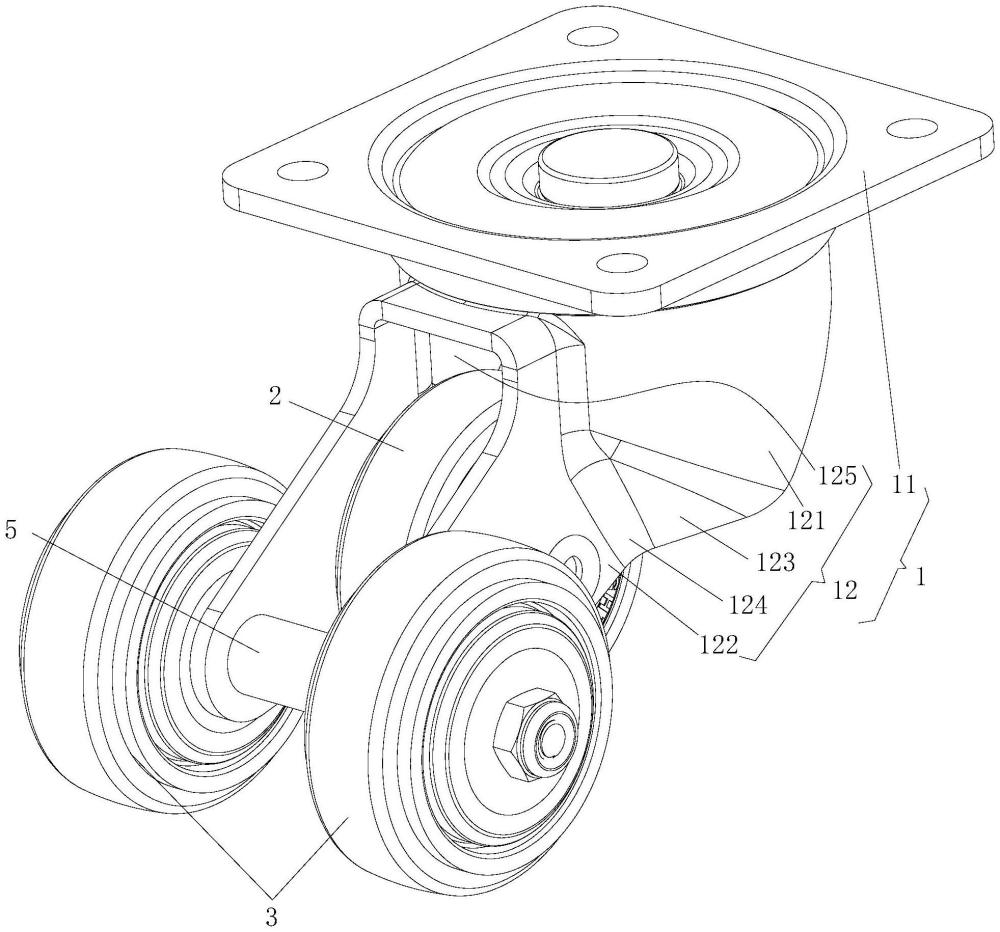
2、为解决上述问题,本实用新型提出了如下方案:一种高承重脚轮,包括支架,所述支架包括支撑部,以及转动设置在所述支撑部上的连接部,还包括前轮和后轮,所述后轮共设有两个,且分别转动设置在所述连接部远离所述支撑部的端部的两侧上,所述前轮转动设置在所述连接部的中部上,所述前轮相对所述支撑部的高度小于所述后轮相对所述支撑部的高度。
3、如上所述的一种高承重脚轮,所述连接部包括环形架和竖板,所述环形架转动设置在所述支撑部的底面上,所述竖板一端与所述环形架一体化设置,另一端与所述后轮连接。
4、如上所述的一种高承重脚轮,所述竖板共设有两个,两个所述竖板平行且间隔设置,两个所述竖板之间设有前轮转动轴,所述前轮转动轴两端搭设在两个所述竖板上,所述前轮转动轴中部与所述前轮转动配合。
5、如上所述的一种高承重脚轮,两个所述竖板之间设有后轮转动轴,所述后轮转动轴一端穿过其中一个所述竖板与其中一个所述后轮转动配合,另一端穿过另一个所述竖板与另一个所述后轮转动配合。
6、如上所述的一种高承重脚轮,所述前轮转动轴两端与所述竖板通过设有铆钉连接,所述后轮的半径为r1,所述铆钉的铆钉头的半径为r,两个所述后轮之间的距离为l,满足l=(r1+r+2mm)±1mm。
7、如上所述的一种高承重脚轮,所述前轮的半径为r2,所述前轮与所述后轮的轴距为h,满足h<r1+r2。
8、如上所述的一种高承重脚轮,所述环形架上设有与所述竖板一体化设置的倾斜板,所述倾斜板往靠近另一个所述倾斜板的方向倾斜。
9、如上所述的一种高承重脚轮,所述倾斜板与所述竖板之间设有让位凹部,所述让位凹部往远离所述后轮的方向凹陷,以用于给所述前轮转动轴让位。
10、如上所述的一种高承重脚轮,所述让位凹部为圆角。
11、如上所述的一种高承重脚轮,所述前轮上侧设有让位槽,所述环形架内侧与两个所述竖板之间的间隔通过所述让位槽相互连通。
12、与现有技术相比,本申请有如下优点:
13、本实用新型实施例中,采用的是两个后轮着地的设计,当后轮处于水平面时,前轮处于悬空状态,当后轮前方有障碍物时,因为前轮位于后轮和支撑部之间,所以前轮会抵住障碍物,以带动所述后轮越过障碍物在完成这项目的的同时,由于双轮结构可以在更广泛的区域分散重量,且在承载重量的情况下,有助于避免轮子在负载下产生过多的应力和形变,从而提高了本申请的承重能力,而且双轮结构可以在不平坦的地面上具有更好的适应性,因为两个轮子可以更好地跟随地面的不平坦部分,从而保持接触面积,这可以在承重时提供更稳定的表现。
技术特征:
1.一种高承重脚轮,包括支架(1),所述支架(1)包括支撑部(11),以及转动设置在所述支撑部(11)上的连接部(12),其特征在于,还包括前轮(2)和后轮(3),所述后轮(3)共设有两个,且分别转动设置在所述连接部(12)远离所述支撑部(11)的端部的两侧上,所述前轮(2)转动设置在所述连接部(12)的中部上,所述前轮(2)相对所述支撑部(11)的高度小于所述后轮(3)相对所述支撑部(11)的高度。
2.根据权利要求1所述的一种高承重脚轮,其特征在于,所述连接部(12)包括环形架(121)和竖板(122),所述环形架(121)转动设置在所述支撑部(11)的底面上,所述竖板(122)一端与所述环形架(121)一体化设置,另一端与所述后轮(3)连接。
3.根据权利要求2所述的一种高承重脚轮,其特征在于,所述竖板(122)共设有两个,两个所述竖板(122)平行且间隔设置,两个所述竖板(122)之间设有前轮转动轴(4),所述前轮转动轴(4)两端搭设在两个所述竖板(122)上,所述前轮转动轴(4)中部与所述前轮(2)转动配合。
4.根据权利要求3所述的一种高承重脚轮,其特征在于,两个所述竖板(122)之间设有后轮转动轴(5),所述后轮转动轴(5)一端穿过其中一个所述竖板(122)与其中一个所述后轮(3)转动配合,另一端穿过另一个所述竖板(122)与另一个所述后轮(3)转动配合。
5.根据权利要求4所述的一种高承重脚轮,其特征在于,所述前轮转动轴(4)两端与所述竖板(122)通过设有铆钉(6)连接,所述后轮(3)的半径为r1,所述铆钉(6)的铆钉头的半径为r,两个所述后轮之间的距离为l,满足l=(r1+r+2mm)±1mm。
6.根据权利要求5所述的一种高承重脚轮,其特征在于,所述前轮(2)的半径为r2,所述前轮(2)与所述后轮(3)的轴距为h,满足h<r1+r2。
7.根据权利要求3所述的一种高承重脚轮,其特征在于,所述环形架(121)上设有与所述竖板(122)一体化设置的倾斜板(123),所述倾斜板(123)往靠近另一个所述倾斜板(123)的方向倾斜。
8.根据权利要求7所述的一种高承重脚轮,其特征在于,所述倾斜板(123)与所述竖板(122)之间设有让位凹部(124),所述让位凹部(124)往远离所述后轮(3)的方向凹陷,以用于给所述前轮转动轴(4)让位。
9.根据权利要求8所述的一种高承重脚轮,其特征在于,所述让位凹部(124)为圆角。
10.根据权利要求2所述的一种高承重脚轮,其特征在于,所述前轮(2)上侧设有让位槽(125),所述环形架(121)内侧与两个所述竖板(122)之间的间隔通过所述让位槽(125)相互连通。
技术总结
本技术公开了一种高承重脚轮,包括支架,支架包括支撑部,以及转动设置在支撑部上的连接部,还包括前轮和后轮,后轮共设有两个,且分别转动设置在连接部远离支撑部的端部的两侧上,前轮转动设置在连接部的中部上,前轮相对支撑部的高度小于后轮相对支撑部的高度,当后轮处于水平面时,前轮处于悬空状态,当后轮前方有障碍物时,前轮抵住障碍物,以带动后轮越过障碍物,在完成越过障碍物的同时,由于双轮结构可以在更广泛的区域分散重量,且在承载重量的情况下,有助于避免轮子在负载下产生过多的应力和形变,从而提高了本申请的承重能力。
技术研发人员:覃松辉
受保护的技术使用者:中山市顺泽脚轮有限公司
技术研发日:20230901
技术公布日:2024/3/27
- 还没有人留言评论。精彩留言会获得点赞!