半主动悬架系统的控制方法、装置及计算机可读存储介质与流程
本申请涉及车辆控制,尤其涉及一种半主动悬架系统的控制方法、装置及计算机可读存储介质。
背景技术:
1、随着汽车工业的快速发展和汽车行驶速度的不断提高,人们对汽车行驶安全性和乘坐舒适性提出了更高的要求。汽车半主动悬架系统阻尼的控制方法对悬架的性能具有至关重要的作用,它直接影响汽车的操纵稳定性、乘坐舒适性和行驶安全性。相关技术中,半主动悬架系统的控制方法一般是计算减振器的基准电流,以及根据车轮纵向加速度信号和车身纵向加速度信号计算减振器的目标电流,并根据基准电流和目标电流调节减振器的输入电流,其通过纵向加速度确定车辆是处于刹车还是加速驾驶,忽略车辆以不同车速经过路况时所产生的颤抖和噪音,导致操纵稳定性和乘坐舒适性降低。
技术实现思路
1、本申请实施例通过提供一种半主动悬架系统的控制方法、装置及计算机可读存储介质,旨在考虑车辆以不同车速经过路况时所产生的颤抖和噪音,提高操纵稳定性和乘坐舒适性。
2、本申请实施例提供了一种半主动悬架系统的控制方法,所述半主动悬架系统的控制方法,包括:
3、根据车辆当前的轮跳行程和轮跳速度,确定电控减振器的标定工作电流;
4、获取所述车辆的当前车速,并确定所述当前车速关联的修正系数,其中,所述修正系数随着所述当前车速的增大而减小;
5、基于所述修正系数对所述标定工作电流进行修正,得到所述电控减振器的目标工作电流;
6、控制所述电控减振器按照所述目标工作电流进行工作。
7、可选地,所述根据车辆当前的轮跳行程和轮跳速度,确定电控减振器的标定工作电流的步骤包括:
8、获取车辆当前的轮跳行程,和,获取车辆当前的轮跳速度;
9、获取所述轮跳行程和所述轮跳速度对应的预设工作电流;
10、将所述预设工作电流确定为所述电控减振器的标定工作电流。
11、可选地,所述获取车辆当前的轮跳行程包括:
12、获取车辆当前的轮心到轮眉的实际行程和所述轮心到轮眉的标准行程;
13、确定所述实际行程和所述标准行程之间的差值的绝对值;
14、将所述差值的绝对值确定为所述车辆当前的轮跳行程。
15、可选地,所述获取车辆当前的轮跳速度包括:
16、获取当前的车轮角速度和车轮半径;
17、根据所述车轮角速度和所述车轮半径,确定所述轮跳速度。
18、可选地,所述基于所述修正系数对所述标定工作电流进行修正,得到所述电控减振器的目标工作电流的步骤包括:
19、根据所述修正系数和所述标定工作电流的乘积,确定所述电控减振器的目标工作电流。
20、可选地,所述半主动悬架系统的控制方法,还包括:
21、检测所述轮跳行程是否大于或等于预设轮跳行程;
22、若是,执行所述基于所述修正系数对所述标定工作电流进行修正,得到所述半主动悬架系统的电控减振器的目标工作电流的步骤;
23、若否,基于路面粗糙度和车轮滑移率,确定所述半主动悬架系统的电控减振器的目标工作电流。
24、可选地,所述基于路面粗糙度和车轮滑移率,确定所述电控减振器的目标工作电流的步骤包括:
25、在所述车轮滑移率大于或等于预设滑移率时,根据所述路面粗糙度和所述车轮滑移率,确定所述电控减振器的目标工作电流。
26、可选地,所述根据所述路面粗糙度和所述车轮滑移率,确定所述电控减振器的目标工作电流的步骤包括:
27、根据所述车轮滑移率、第一标定值和第二标定值,确定所述车轮滑移率对应的第一电流增益;
28、根据所述路面粗糙度、第三标定值和第四标定值,确定所述路面粗糙度对应的第二电流增益;
29、获取所述电控减振器的基础电流;
30、根据所述第一电流增益、所述第二电流增益和所述基础电流,确定所述电控减振器的目标工作电流。
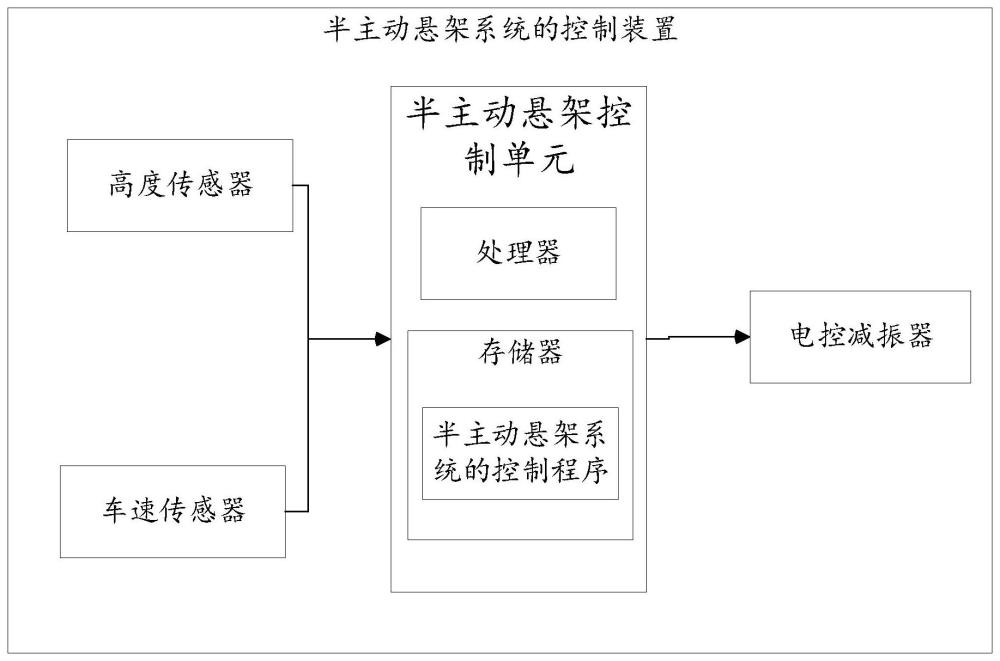
31、此外,为实现上述目的,本申请还提供了一种半主动悬架系统的控制装置,所述半主动悬架系统的控制装置包括:至少一个高度传感器、车速传感器、至少一个电控减振器和半主动悬架控制单元组成,所述半主动悬架控制单元分别与所述高度传感器、所述车速传感器和所述电控减振器连接;所述半主动悬架控制单元包括:存储器、处理器及存储在所述存储器上并在所述处理器上运行的半主动悬架系统的控制程序,所述半主动悬架系统的控制程序被所述处理器执行时实现如上所述的半主动悬架系统的控制方法的步骤。
32、此外,为实现上述目的,本申请还提供了一种计算机可读存储介质,其上存储有半主动悬架系统的控制程序,所述半主动悬架系统的控制程序被处理器执行时实现上述的半主动悬架系统的控制方法的步骤。
33、本申请实施例中提供的一种半主动悬架系统的控制方法、装置及计算机可读存储介质的技术方案,相比于相关技术只通过纵向加速度确定车辆是处于刹车还是加速驾驶,本申请考虑车辆的当前车速,根据当前车速关联的修正系数对电控减振器的标定工作电流进行修正,得到电控减振器的目标工作电流,进而控制电控减振器按照该目标工作电流进行工作。由于低中车速时车身姿态相对于高速时不稳定,修正系数随着当前车速的增大而减小,使得当车速增大时,对应的修正系数减小,电控减振器的目标工作电流减小以减缓冲击,当车速减小时,对应的修正系数增大,电控减振器的目标工作电流增大以加强控制,从而提高操纵稳定性和乘坐舒适性。
技术特征:
1.一种半主动悬架系统的控制方法,其特征在于,所述半主动悬架系统的控制方法包括:
2.如权利要求1所述的半主动悬架系统的控制方法,其特征在于,所述根据车辆当前的轮跳行程和轮跳速度,确定电控减振器的标定工作电流的步骤包括:
3.如权利要求2所述的半主动悬架系统的控制方法,其特征在于,所述获取车辆当前的轮跳行程包括:
4.如权利要求2所述的半主动悬架系统的控制方法,其特征在于,所述获取车辆当前的轮跳速度包括:
5.如权利要求1所述的半主动悬架系统的控制方法,其特征在于,所述基于所述修正系数对所述标定工作电流进行修正,得到所述电控减振器的目标工作电流的步骤包括:
6.如权利要求1所述的半主动悬架系统的控制方法,其特征在于,所述半主动悬架系统的控制方法,还包括:
7.如权利要求6所述的半主动悬架系统的控制方法,其特征在于,所述基于路面粗糙度和车轮滑移率,确定所述电控减振器的目标工作电流的步骤包括:
8.如权利要求7所述的半主动悬架系统的控制方法,其特征在于,所述根据所述路面粗糙度和所述车轮滑移率,确定所述电控减振器的目标工作电流的步骤包括:
9.一种半主动悬架系统的控制装置,其特征在于,所述半主动悬架系统的控制装置包括:至少一个高度传感器、车速传感器、至少一个电控减振器和半主动悬架控制单元组成,所述半主动悬架控制单元分别与所述高度传感器、所述车速传感器和所述电控减振器连接;
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有半主动悬架系统的控制程序,所述半主动悬架系统的控制程序被处理器执行时实现权利要求1-8中任一项所述的半主动悬架系统的控制方法的步骤。
技术总结
本申请公开了半主动悬架系统的控制方法、装置及计算机可读存储介质,该方法包括:根据车辆当前的轮跳行程和轮跳速度,确定电控减振器的标定工作电流;获取所述车辆的当前车速,并确定所述当前车速关联的修正系数,其中,所述修正系数随着所述当前车速的增大而减小;基于所述修正系数对所述标定工作电流进行修正,得到所述电控减振器的目标工作电流;控制所述电控减振器按照所述目标工作电流进行工作。旨在考虑车辆以不同车速经过路况时所产生的颤抖和噪音,提高操纵稳定性和乘坐舒适性。
技术研发人员:杨威杰,马祖国,郑林,陈刚,尚玉伟,王贺
受保护的技术使用者:浙江极氪智能科技有限公司
技术研发日:
技术公布日:2024/2/29
- 还没有人留言评论。精彩留言会获得点赞!