基于制动特征提取的路面类别识别算法及系统的制作方法
本发明涉及路面类别识别方法,具体为基于制动特征提取的路面类别识别算法及系统。
背景技术:
1、路面类别识别有着广泛的用途,其中路面类别识别可以帮助自动驾驶系统和智能车辆准确识别当前所行驶的路面类型,如城市道路、高速公路、乡村道路等,这对于车辆的行驶决策和控制非常重要;
2、传统的路面类别主要是基于图像处理技术,传统图像处理需要手动提取特征来表示不同的路面类别,但路面纹理和形状等特征在不同场景下变化较大,导致难以准确提取有效的特征,在路面中存在各种复杂的情况,如路面污染、坑洞、临时施工标志等,传统图像处理方法难以直接捕捉并准确识别这些复杂情况。
技术实现思路
1、本发明的目的在于提供基于制动特征提取的路面类别识别算法及系统,以解决上述背景技术中提出的问题。
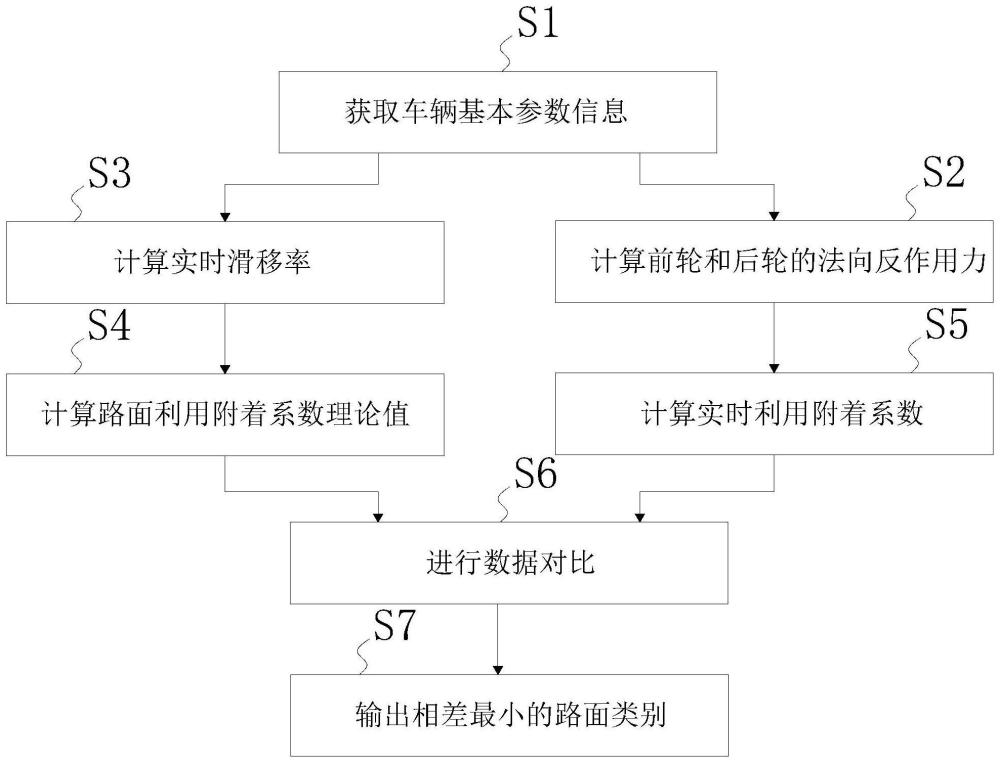
2、为实现上述目的,本发明提供如下技术方案:基于制动特征提取的路面类别识别算法,包括以下步骤:
3、s1、获取车辆的基本参数信息:获取车辆的总质量,获取车辆质心与前后车轮中心轴之间的距离,获取车轮中心轴之间的距离,获取车辆质心的高度,获取车轮半径,通过车速传感器实时获取车辆行驶过程中的车速,通过前轮角速度传感器实时获取车辆行驶过程中的前轮角速度,通过制动力矩传感器实时获取车辆行驶过程中的制动力矩和滚动阻力矩;
4、s2、计算前轮和后轮的法向反作用力:通过前轮和后轮的法向反作用力计算公式,计算前轮和后轮的法向反作用力;
5、s3、计算实时滑移率:通过实时滑移率计算公式计算实时滑移率;
6、s4、计算路面利用附着系数理论值:通过利用附着系数计算公式计算利用附着系数理论值;
7、s5、计算实时利用附着系数:通过实时利用附着系数计算公式计算实时利用附着系数;
8、s6、进行数据对比:将路面利用附着系数理论值与实时利用附着系数进行相比做差值;
9、s7、输出相差最小的路面类别:将差值进行比较,若相差最小,则数据输出相差最小的路面类别,从而完成对路面类别的识别。
10、优选的,在步骤s2中,前轮的法向反作用力计算公式具体为:
11、
12、后轮的法向反作用力计算公式具体为:
13、
14、其中,m表示车辆的总质量,a表示车辆质心与前车轮中心轴之间的距离,b表示车辆质心与后车轮中心轴之间的距离,hg表示车辆质心的高度,l表示车轮中心轴之间的距离,表示加速度。
15、优选的,在步骤s3中,对于实时滑移率计算公式具体为:
16、
17、其中,v表示车辆行驶过程中的车速,表示车辆行驶过程中的前轮角速度,r表示车轮半径。
18、优选的,在步骤s4中,对于利用附着系数计算公式具体为:
19、u(s)=λ1[1-exp(-λ2s)]-λ3s
20、其中,λ1、λ2和λ3分别表示三种不同路面类别的拟合参数,s表示实时滑移率。
21、优选的,在步骤s5中,对于实时利用附着系数计算公式具体为:
22、
23、其中,t1表示制动力矩,t2表示滚动阻力矩,表示车辆行驶过程中的前轮角速度,fz1表示前轮的法向反作用力,fz2表示后轮的法向反作用力。
24、基于制动特征提取的路面类别识别系统,包括参数采集单元、数据清洗单元、数据输入单元、数据存储单元、模型建立单元、数据对比单元、类别显示单元、结果输出单元和人机交互单元;
25、所述参数采集单元采集车辆的基本参数信息,以及车辆行驶过程中的制动信息,将采集的数据传输至数据清洗单元;
26、所述数据清洗单元对参数采集单元发出的数据进行接收,并对采集的数据进行缺失值处理、异常值处理和重复值处理,将清洗后的数据传输至数据存储单元;
27、所述人机交互单元通过工作人员输入不同路面的利用附着系数理论值,将输入的不同路面的利用附着系数理论值传输至数据存储单元中;
28、所述数据存储单元对数据清洗单元发出的数据进行接收,并对人机交互单元发出的不同路面的利用附着系数理论值进行接收,将接收的数据存储到数据库中,并将数据库中的,将车辆行驶过程中的制动信息传输至数据输入单元,将数据库中的不同路面的利用附着系数理论值传输至数据对比单元;
29、所述数据输入单元对数据存储单元发出的车辆行驶过程中的制动信息进行接收,并将接收的制动信息作为模型建立单元的输入端,输入至模型建立单元中;
30、所述模型建立单元利用路面类别识别算法建立实时利用附着系数模型,并将接收的制动信息作为输入端,从而获取实时利用附着系数,且将获取的实时利用附着系数传输至数据对比单元。
31、优选的,所述数据对比单元对数据存储单元发出的不同路面的利用附着系数理论值进行接收,并对模型建立单元发出的实时利用附着系数进行接收,将二者进行对比,将差值最小的路面类别传输至结果输出单元,所述结果输出单元对数据对比单元发出的路面类别进行接收,并将接收的路面类别传输至类别显示单元,所述类别显示单元对结果输出单元发出的路面类别进行接收,并通过显示器以图表的形式将路面类别进行显示。
32、优选的,所述数据清洗单元包括缺失值处理模块、异常值处理模块和重复值处理模块,所述缺失值处理模块检测并处理数据中的缺失值,选择删除含有缺失值的记录,所述异常值处理模块对数据中可能存在的异常值进行识别和处理,由于异常值是由错误采集、数据录入错误、设备故障原因引起的,从而删除异常值,所述重复值处理模块检测和移除数据中的重复值,确保每条记录都是唯一的。
33、与现有技术相比,本发明的有益效果是:
34、本发明通过计算利用附着系数和滑移率,可以直接获得路面的物理属性,而不是仅仅基于图像纹理或形状等视觉特征,这样可以更准确地刻画路面的摩擦性能和稳定性,对于车辆行驶安全具有重要意义,并且相比于传统图像处理需要大量人工标注数据来训练模型,附着系数和滑移率的测量通常是通过专用设备和传感器实时获取的,并不需要额外的人工标注工作,这样可以节省时间和成本,附着系数和滑移率作为直接测量的物理属性,具有较强的可迁移性和泛化能力,即使在不同场景、不同地点和不同路况下,它们仍然可以提供准确的路面类别识别结果,对于车辆控制和驾驶辅助系统等应用具有可靠性和稳定性。
技术特征:
1.基于制动特征提取的路面类别识别算法,其特征在于包括以下步骤:
2.根据权利要求1所述的基于制动特征提取的路面类别识别算法,其特征在于:在步骤s2中,前轮的法向反作用力计算公式具体为:
3.根据权利要求2所述的基于制动特征提取的路面类别识别算法,其特征在于:在步骤s3中,对于实时滑移率计算公式具体为:
4.根据权利要求3所述的基于制动特征提取的路面类别识别算法,其特征在于:在步骤s4中,对于利用附着系数计算公式具体为:
5.根据权利要求4所述的基于制动特征提取的路面类别识别算法,其特征在于:在步骤s5中,对于实时利用附着系数计算公式具体为:
6.基于制动特征提取的路面类别识别系统,其特征在于包括参数采集单元(1)、数据清洗单元(2)、数据输入单元(3)、数据存储单元(4)、模型建立单元(5)、数据对比单元(6)、类别显示单元(7)、结果输出单元(8)和人机交互单元(9);
7.根据权利要求6所述的基于制动特征提取的路面类别识别系统,其特征在于:所述数据对比单元(6)对数据存储单元(4)发出的不同路面的利用附着系数理论值进行接收,并对模型建立单元(5)发出的实时利用附着系数进行接收,将二者进行对比,将差值最小的路面类别传输至结果输出单元(8),所述结果输出单元(8)对数据对比单元(6)发出的路面类别进行接收,并将接收的路面类别传输至类别显示单元(7),所述类别显示单元(7)对结果输出单元(8)发出的路面类别进行接收,并通过显示器以图表的形式将路面类别进行显示。
8.根据权利要求6所述的基于制动特征提取的路面类别识别系统,其特征在于:所述数据清洗单元(2)包括缺失值处理模块(201)、异常值处理模块(202)和重复值处理模块(203),所述缺失值处理模块(201)检测并处理数据中的缺失值,选择删除含有缺失值的记录,所述异常值处理模块(202)对数据中可能存在的异常值进行识别和处理,由于异常值是由错误采集、数据录入错误、设备故障原因引起的,从而删除异常值,所述重复值处理模块(203)检测和移除数据中的重复值,确保每条记录都是唯一的。
技术总结
本发明公开了基于制动特征提取的路面类别识别算法及系统,涉及路面类别识别方法技术领域,包括以下步骤:S1、获取车辆的基本参数信息:获取车辆的总质量,获取车辆质心与前后车轮中心轴之间的距离,获取车轮中心轴之间的距离,获取车辆质心的高度,获取车轮半径;S2、计算前轮和后轮的法向反作用力:通过前轮和后轮的法向反作用力计算公式,计算前轮和后轮的法向反作用力。本发明通过计算利用附着系数和滑移率,可以直接获得路面的物理属性,而不是仅仅基于图像纹理或形状等视觉特征,这样可以更准确地刻画路面的摩擦性能和稳定性。
技术研发人员:陈志贤,谢立炜,傅涛,胡伟,陈刚,黄晶
受保护的技术使用者:凯晟动力技术(嘉兴)有限公司
技术研发日:
技术公布日:2024/4/24
- 还没有人留言评论。精彩留言会获得点赞!