一种基于无人机平台的高压输电线巡检维护机器人
本发明涉及电力检修设备,具体涉及一种基于无人机平台的高压输电线巡检维护机器人。
背景技术:
1、高压输电线路作为电力系统的核心组件,承担着电力传输的关键职责,其地位堪比国家基础设施和社会发展的“生命线”。然而,由于高压线路通常暴露于外部环境,易受到自然和人为因素的双重影响,导致各类故障的风险增加。若此类隐患未得到及时排查,将对整个电力系统构成潜在威胁。为确保输电线路的稳定运行,实施定期的巡检工作显得尤为重要。
2、维护高压输电线路的工作不仅劳动强度大,而且涉及诸多复杂因素。传统的巡检方式主要包括飞机巡检、车辆巡检和人工巡检。然而,这些传统方法普遍存在一系列问题,如对气候的依赖性强、运行成本高昂、劳动强度大、危险系数高、巡检效率和准确度欠佳以及可靠性不足等。当前,巡检人员主要携带各类维护设备沿线路执行任务,但这种方式效率低下、成本高昂,且误检漏检的情况时有发生。因此,高压输电线路维护的自动化已成为迫切需求。
技术实现思路
1、本发明的目的在于提供一种基于无人机平台的高压输电线巡检维护机器人,以解决现有技术中导致的上述缺陷。
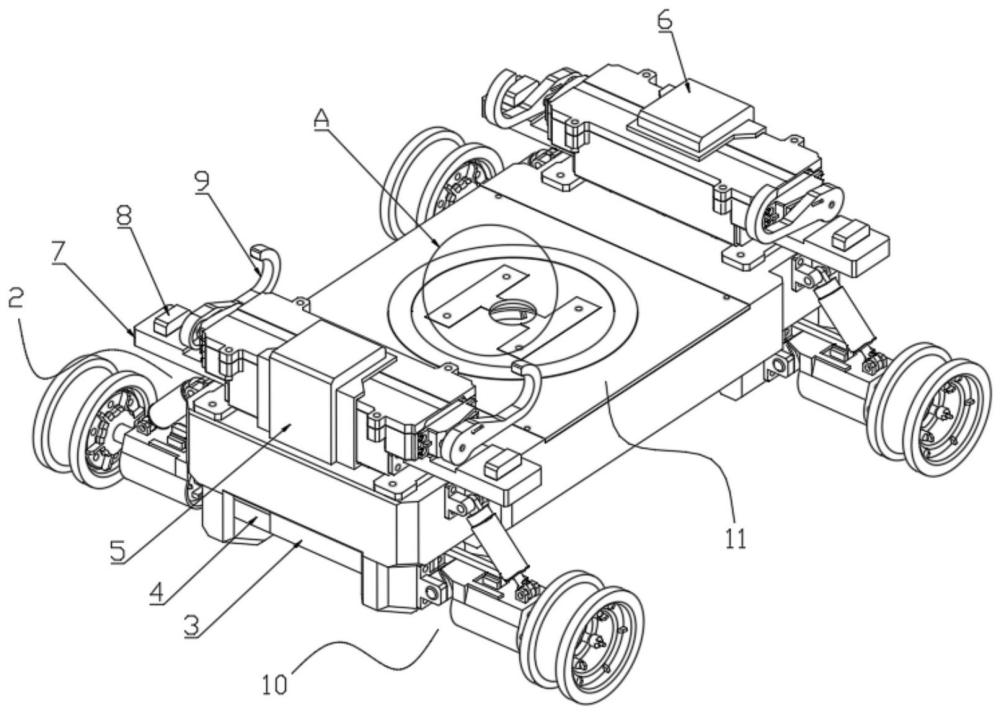
2、一种基于无人机平台的高压输电线巡检维护机器人,包括轮式无人车和视觉传感机构,所述轮式无人车上安装模块化电池组件,以及与之相连的单片机,所述视觉传感机构包括前视传感器、后视传感器、无人机抓取平台、无人机引导灯以及无人机钩爪,还包括减震系统底盘和机身稳定系统,所述减震系统底盘安装于轮式无人车的中部,并用于实现多场合下的高效巡检,所述机身稳定系统安装于减震系统底盘上,并用于避免机器人在维护过程中运动状态所产生的重心偏移。
3、优选的,所述减震系统底盘包括底盘本体、驱动电机以及弹簧减震器,所述底盘本体安装于轮式无人机的中部,底盘本体上安装有载机板,所述载机板上开设有过线孔和螺丝孔位,底盘本体上还安装有电子通信接口,所述驱动电机通过电机铰链安装于底盘本体的侧端,电机铰链上通过限位杆安装有限位开关,所述限位开关与驱动电机电性连接,驱动电机的输出端安装有连轴杆,所述连轴杆的另一端与轮式无人车的轮子相连,所述弹簧减震器的下端铰接于驱动电机上,弹簧减震器的上端通过弹簧铰链与轮式无人车相连。
4、优选的,所述机身稳定系统包括整流罩和配重块,所述整流罩安装于底盘本体上,底盘本体上于整流罩的内部安装有旋转角度可调的电动机,所述配重块安装于电动机的输出端上,电动机的输出端与驱动电机的输出端相配合。
5、优选的,所述线路除障机构包括安装架、破拆爪以及自转防振盘,所述安装架固定于轮式无人车上,安装架上安装有电机二和导向板,所述电机二的输出端安装有曲柄,所述曲柄的两端均铰接有连杆,所述破拆爪滑动设置于导向板上,破拆爪的上端铰接于连杆的另一端,所述自转防振盘对称安装于安装架上,并置于电机二的两侧。
6、优选的,所述模块化电池组件为可拆卸式。
7、优选的,所述连轴杆与轮式无人车的轮子均为可更换设置,并分别与高压输电线的线距和高压输电线线缆直径相配合。
8、优选的,所述底盘本体上还安装有姿态传感器。
9、本发明的优点在于:通过底盘本体上预留电子通信接口,且载机板预留过线孔和螺丝孔位,可装配如机械臂、火焰发射装置等多种执行机构,从而实现多场合下的高效巡检。与人工巡检相比,机器人巡检不仅减轻了劳动强度、降低了检测成本,而且显著提高了检测的准确性和效率。此外,机器人应用还显著提升了线路的管理和维护水平,降低了安全风险。因此,高压输电线巡检维护机器人在市场上具有广阔的应用前景。提升电力部门的自动化作业水平,从而获得更高的经济效益和社会效益,具有重大实际意义。
技术特征:
1.一种基于无人机平台的高压输电线巡检维护机器人,包括轮式无人车(1)和视觉传感机构(2),所述轮式无人车(1)上安装模块化电池组件(3),以及与之相连的单片机(4),所述视觉传感机构(2)包括前视传感器(5)、后视传感器(6)、无人机抓取平台(7)、无人机引导灯(8)以及无人机钩爪(9),其特征在于,还包括减震系统底盘(10)和机身稳定系统(11),所述减震系统底盘(10)安装于轮式无人车(1)的中部,并用于实现多场合下的高效巡检,所述机身稳定系统(11)安装于减震系统底盘(10)上,并用于避免机器人在维护过程中运动状态所产生的重心偏移。
2.根据权利要求1所述的一种基于无人机平台的高压输电线巡检维护机器人,其特征在于:所述减震系统底盘(10)包括底盘本体(1001)、驱动电机(1002)以及弹簧减震器(1003),所述底盘本体(1001)安装于轮式无人机的中部,底盘本体(1001)上安装有载机板(1004),所述载机板(1004)上开设有过线孔(1005)和螺丝孔位(1006),底盘本体(1001)上还安装有电子通信接口(1007),所述驱动电机(1002)通过电机铰链(1008)安装于底盘本体(1001)的侧端,电机铰链(1008)上通过限位杆(1009)安装有限位开关(1010),所述限位开关(1010)与驱动电机(1002)电性连接,驱动电机(1002)的输出端安装有连轴杆(1011),所述连轴杆(1011)的另一端与轮式无人车(1)的轮子相连,所述弹簧减震器(1003)的下端铰接于驱动电机(1002)上,弹簧减震器(1003)的上端通过弹簧铰链(1012)与轮式无人车(1)相连。
3.根据权利要求1所述的一种基于无人机平台的高压输电线巡检维护机器人,其特征在于:所述机身稳定系统(11)包括整流罩(111)和配重块(112),所述整流罩(111)安装于底盘本体(1001)上,底盘本体(1001)上于整流罩(111)的内部安装有旋转角度可调的电动机(113),所述配重块(112)安装于电动机(113)的输出端上,电动机(113)的输出端与驱动电机(1002)的输出端相配合。
4.根据权利要求1所述的一种基于无人机平台的高压输电线巡检维护机器人,其特征在于:所述模块化电池组件(3)为可拆卸式。
5.根据权利要求2所述的一种基于无人机平台的高压输电线巡检维护机器人,其特征在于:所述连轴杆(1011)与轮式无人车(1)的轮子均为可更换设置,并分别与高压输电线的线距和高压输电线线缆直径相配合。
6.根据权利要求2所述的一种基于无人机平台的高压输电线巡检维护机器人,其特征在于:所述底盘本体(1001)上还安装有姿态传感器。
技术总结
本发明公开了一种基于无人机平台的高压输电线巡检维护机器人,涉及电力检修设备技术领域,包括轮式无人车和视觉传感机构,所述轮式无人车上安装模块化电池组件,以及与之相连的单片机,还包括减震系统底盘和机身稳定系统。本发明通过底盘本体上预留电子通信接口,且载机板预留过线孔和螺丝孔位,可装配如机械臂、火焰发射装置等多种执行机构,从而实现多场合下的高效巡检。与人工巡检相比,机器人巡检不仅减轻了劳动强度、降低了检测成本,而且显著提高了检测的准确性和效率。此外,机器人应用还显著提升了线路的管理和维护水平,降低了安全风险。
技术研发人员:刘金金,陈涵,顾海,张捷,贺雨轩
受保护的技术使用者:南通理工学院
技术研发日:
技术公布日:2024/4/29
- 还没有人留言评论。精彩留言会获得点赞!