一种赛车辅助驾驶方法、装置、电子设备及存储介质
本发明涉及辅助驾驶,具体为一种赛车辅助驾驶方法、装置、电子设备及存储介质。
背景技术:
1、赛车运动是一项以速度和技巧为基础的竞技性运动,其需要高度的技巧与专业知识,车手需要掌握赛车操控技巧,在直道以及弯道都能在极限速度与加速度下规划出最优赛车路线。对于该竞技运动而言,实时判断并驾驶出最佳路线对于提高圈速成绩至关重要。
2、目前,针对车手走线的优化指导往往是通过赛后或训练结束赛车返回停车区后,使用电脑对行车电脑的记录数据进行读取,通过与较快圈速的行驶数据进行对比分析,来对车手的驾驶进行指优化导,这种事后指导的方式,在时间上存在一定的滞后性,也不能够较好地利用赛道海量的历史行驶数据。
3、而针对赛车轨迹优化,目前主要有以下方法:传统的基于最小曲率二次规划的轨迹规划方法根据地图与车辆的曲率约束关系来提供优化轨迹,方法较为简单,计算量小部署方便,但并没有对车辆的横纵向约束进行充分考虑;基于模型预测控制的方法,能够充分考虑车辆的横纵向极限,但未能考虑赛车手的人为因素,缺少能根据赛车手驾驶风格个性化规划优化轨迹的能力。
4、同时,以上两种方法赛车手在日常训练中无法实时地看到赛车优化轨迹,提高赛道走线能力效率低,难以实现高效率的赛车驾驶辅助。
技术实现思路
1、针对现有技术中存在的问题,本发明的目的是:提供一种赛车辅助驾驶方法、装置、电子设备及存储介质,能够根据赛车手驾驶风格个性化规划优化轨迹并对车手进行实时的走线引导,实现高效率的赛车驾驶辅助。
2、为了达到上述目的,本发明采用如下技术方案:
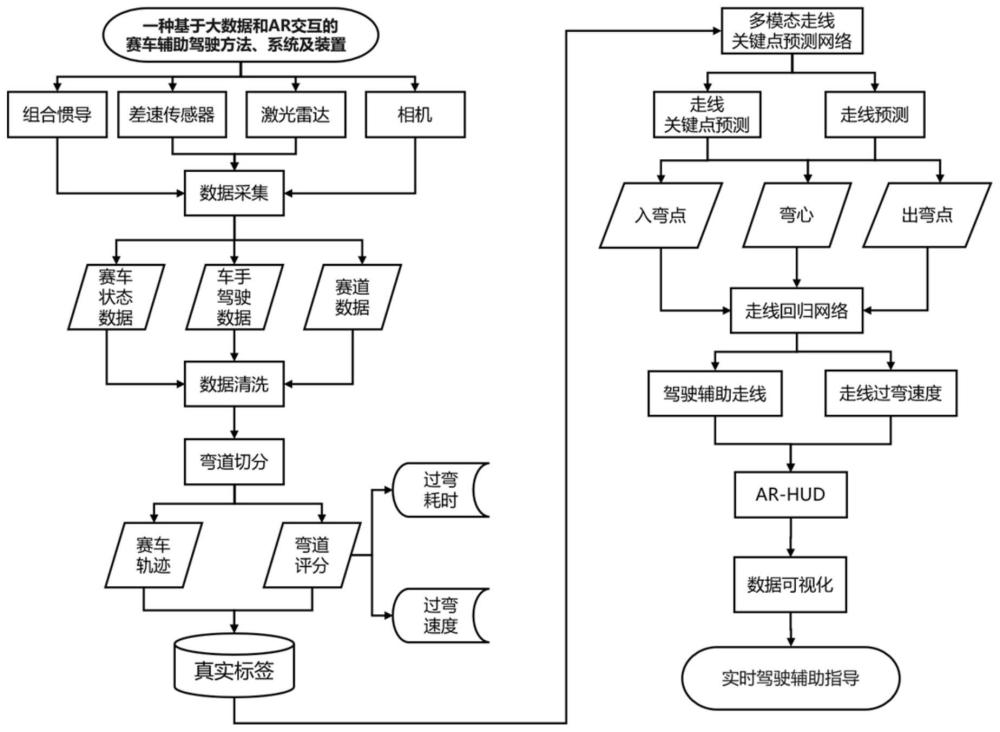
3、一种赛车辅助驾驶方法,包括以下步骤,
4、获取包含有赛车轨迹的赛车状态数据、车手驾驶数据和赛道数据;
5、对赛车状态数据、车手驾驶数据和赛道数据进行数据清洗和弯道切分,得到赛车与弯道数据段;
6、对赛车与弯道数据段进行评分,得到赛车弯道段评价分数;
7、基于赛车轨迹与赛车弯道段评价分数搭建走线关键点预测网络和走线回归网络;
8、对走线关键点预测网络和走线回归网络进行训练,预测获取多模态赛车走线与弯速信息,采用ar-hud技术使多模态赛车走线与弯速信息虚实结合以将赛车轨迹及速度信息可视化,实现对车手的实时驾驶辅助指导。
9、进一步,获取赛车状态数据、车手驾驶数据和赛道数据包括,借助组合惯导和差速传感器采集赛车的位姿、速度、加速度、角速度信息,并采集车手驾驶过程中的油门、制动踏板开度及方向盘夹角信息,借助激光雷达与相机采集赛道边界与中心线信息。
10、进一步,数据清洗包括,将采集到的赛车状态数据、车手驾驶数据和赛道数据进行比较判断,剔除其中横摆角、轮胎滑移率、曲率约束过大与冲出赛场边界的异常数据,保证数据正确性与真实性。
11、进一步,弯道切分包括,对已清洗的赛车与弯道数据段按照弯道曲率半径和一定距离切分成若干可用数据段。
12、进一步,对赛车与弯道数据段进行评分包括,根据采集到的油门、制动踏板数据和赛场弯道曲率半径及形状信息,确定切分段弯心、入弯点和出弯点,按照进弯的最高速度与耗时对每一条赛车轨迹进行评分。
13、进一步,评分包括弯速评分和过弯时间评分,pi=piv+pit,pi为弯道总评分,piv为弯速评分,pit为时间评分;
14、当前弯道段第i个轨迹的弯速评分为:
15、
16、其中vimax为当前弯道所有轨迹的最高速度,vmax为赛车过弯实际最高速度;
17、当前弯道段第i个轨迹的时间评分为:
18、
19、其中ti为过弯实际耗时,tmin为当前弯道所有轨迹的最短耗时,tmax为tmin的125%,当ti>tmax时,pit为2.5。
20、进一步,将赛车轨迹及速度信息可视化包括,根据旋转平移矩阵来确定世界坐标系和像素坐标系下的赛车优化轨迹坐标,并以此反解求得坐标矩阵的标定系数,实现输出信息与赛道环境的高度融合,输出信息包括多模态赛车优化轨迹、轨迹耗时、评分和弯速,旋转平移矩阵为:
21、
22、其中,xw、yw、zw分别为赛车优化轨迹点世界坐标系下的坐标,xp和yp分别为hud设备上优化轨迹点的像素坐标,r和t为车载ar-hud的标定系数。
23、一种赛车辅助驾驶装置,包括:
24、数据获取模块,用于获取包含有赛车轨迹的赛车状态数据、车手驾驶数据和赛道数据;
25、数据处理模块,用于对赛车状态数据、车手驾驶数据和赛道数据进行数据清洗和弯道切分,得到赛车与弯道数据段,对赛车与弯道数据段进行评分,得到赛车弯道段评价分数,基于赛车轨迹与赛车弯道段评价分数搭建走线关键点预测网络和走线回归网络,对走线关键点预测网络和走线回归网络进行训练,预测获取多模态赛车走线与弯速信息,将多模态赛车走线与弯速信息虚实结合,使赛车轨迹及速度信息可视化;
26、显示模块,用于显示可视化的赛车轨迹及速度信息,实现对车手的实时驾驶辅助指导。
27、一种电子设备,包括处理器和存储器,存储器中存储有计算机程序,处理器执行计算机程序时实现赛车辅助驾驶方法。
28、一种存储介质,存储介质中存储有计算机程序,计算机程序被处理器执行时实现赛车辅助驾驶方法。
29、总的说来,本发明具有如下优点:
30、本发明充分利用了赛车状态数据、车手驾驶数据和赛道数据等历史驾驶数据,利用基于深度学习的轨迹预测方法,能够根据赛车手驾驶风格个性化规划优化轨迹,为车手提供更加精准的走线指导,并利用ar交互技术将赛车的走线实时投影至hud设备中,使车手在驾驶赛车的过程中,对赛车走线有更加直观的感知,实现高效率的赛车驾驶辅助。
技术特征:
1.一种赛车辅助驾驶方法,其特征在于:包括以下步骤,
2.根据权利要求1所述的一种赛车辅助驾驶方法,其特征在于:获取赛车状态数据、车手驾驶数据和赛道数据包括,借助组合惯导和差速传感器采集赛车的位姿、速度、加速度、角速度信息,并采集车手驾驶过程中的油门、制动踏板开度及方向盘夹角信息,借助激光雷达与相机采集赛道边界与中心线信息。
3.根据权利要求1所述的一种赛车辅助驾驶方法,其特征在于:数据清洗包括,将采集到的赛车状态数据、车手驾驶数据和赛道数据进行比较判断,剔除其中横摆角、轮胎滑移率、曲率约束过大与冲出赛场边界的异常数据,保证数据正确性与真实性。
4.根据权利要求1所述的一种赛车辅助驾驶方法,其特征在于:弯道切分包括,对已清洗的赛车与弯道数据段按照弯道曲率半径和一定距离切分成若干可用数据段。
5.根据权利要求1所述的一种赛车辅助驾驶方法,其特征在于:对赛车与弯道数据段进行评分包括,根据采集到的油门、制动踏板数据和赛场弯道曲率半径及形状信息,确定切分段弯心、入弯点和出弯点,按照进弯的最高速度与耗时对每一条赛车轨迹进行评分。
6.根据权利要求1所述的一种赛车辅助驾驶方法,其特征在于:评分包括弯速评分和过弯时间评分,pi=piv+pit,pi为弯道总评分,piv为弯速评分,pit为时间评分;
7.根据权利要求1所述的一种赛车辅助驾驶方法,其特征在于:将赛车轨迹及速度信息可视化包括,根据旋转平移矩阵来确定世界坐标系和像素坐标系下的赛车优化轨迹坐标,并以此反解求得坐标矩阵的标定系数,实现输出信息与赛道环境的高度融合,输出信息包括多模态赛车优化轨迹、轨迹耗时、评分和弯速,旋转平移矩阵为:
8.权利要求1-7任一项所述的一种赛车辅助驾驶方法的装置,其特征在于,包括:
9.一种电子设备,其特征在于,包括处理器和存储器,存储器中存储有计算机程序,处理器执行计算机程序时实现如权利要求1-7任一项所述的赛车辅助驾驶方法。
10.一种存储介质,其特征在于,存储介质中存储有计算机程序,计算机程序被处理器执行时实现如权利要求1-7任一项所述的赛车辅助驾驶方法。
技术总结
本发明涉及一种赛车辅助驾驶方法、装置、电子设备及存储介质,赛车辅助驾驶方法,包括以下步骤,获取包含有赛车轨迹的赛车状态数据、车手驾驶数据和赛道数据;对数据进行数据清洗和弯道切分,得到赛车与弯道数据段;对赛车与弯道数据段进行评分,得到赛车弯道段评价分数;基于赛车轨迹与赛车弯道段评价分数搭建走线关键点预测网络和走线回归网络;对走线关键点预测网络和走线回归网络进行训练,预测获取多模态赛车走线与弯速信息,采用ar‑hud技术使多模态赛车走线与弯速信息虚实结合以将赛车轨迹及速度信息可视化,实现对车手的实时驾驶辅助指导。本发明能够根据赛车手驾驶风格个性化规划优化轨迹,为车手提供更加精准的走线指导。
技术研发人员:梁泽林,李巍华,钟镇涛,韦智琛,谢翀
受保护的技术使用者:华南理工大学
技术研发日:
技术公布日:2024/5/10
- 还没有人留言评论。精彩留言会获得点赞!