人机协同转向控制方法、装置、电子设备和存储介质
本申请涉及车辆控制领域,特别是涉及一种人机协同转向控制方法、装置、电子设备和存储介质。
背景技术:
1、汽车智能化控制是减少交通事故,减轻驾驶员操作负担的有效途径,但受制于当前技术水平的发展,短期内完全自动驾驶汽车的安全问题仍无法解决。因此在自动驾驶技术完全成熟之前,驾驶过程中驾驶员仍需实时在线,人机协同控制局面将长期存在。
2、然而在目前的人机协同控制过程中,当驾驶员与驾驶辅助系统的控制意图不一致时,难以较为稳定地平衡两者的控制意图,进而极易引发人机冲突,降低车辆行驶的安全性。
3、针对现有的车辆人机协同控制方法存在安全性低的问题,目前还没有提出有效的解决方案。
技术实现思路
1、在本发明中提供了一种人机协同转向控制方法、装置、电子设备和存储介质,以解决现有的车辆人机协同控制方法存在安全性低的问题。
2、第一个方面,在本发明中提供了一种人机协同转向控制方法,用于控制车辆的转向,所述方法包括:
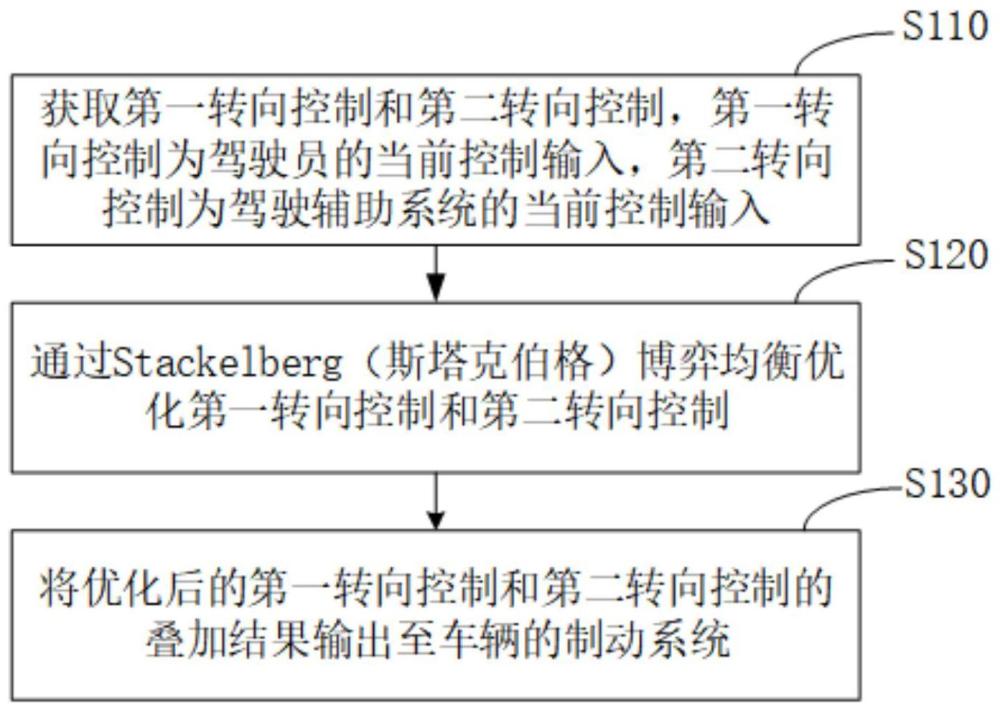
3、获取第一转向控制和第二转向控制,所述第一转向控制为驾驶员的当前控制输入,所述第二转向控制为驾驶辅助系统的当前控制输入;
4、通过stackelberg博弈均衡优化所述第一转向控制和所述第二转向控制;
5、将优化后的第一转向控制和第二转向控制的叠加结果输出至所述车辆的转向系统。
6、在其中的一些实施例中,所述通过stackelberg博弈均衡优化所述第一转向控制和所述第二转向控制,包括:
7、以最小化所述驾驶员和所述驾驶辅助系统的代价函数为目标,通过stackelberg博弈均衡优化控制时域内的第一转向控制序列和第二转向控制序列;
8、所述驾驶员和所述驾驶辅助系统的代价函数为:
9、
10、
11、
12、其中,k表示当前时刻,va表示所述驾驶员的代价函数,vc表示所述驾驶辅助系统的代价函数,y表示所述车辆的预测轨迹,t1表示所述驾驶员的期望轨迹,t2表示所述驾驶辅助系统的期望轨迹,q1表示所述驾驶员的轨迹跟踪精度权重矩阵,q2表示所述驾驶辅助系统的轨迹跟踪精度权重矩阵,r1表示所述驾驶员的操作稳定性权重矩阵,r2表示所述驾驶辅助系统的操作稳定性权重矩阵,ua表示所述第一转向控制序列,uc表示所述第二转向控制序列,ua(k)表示所述第一转向控制,uc(k)表示所述第二转向控制,nc表示控制时域。
13、在其巾的一些实施例中,所述第一转向控制序列和所述第二转向控制序列的优化目标为:
14、
15、
16、
17、其中,表示优化后的第一转向控制序列,表示优化后的第二转向控制序列,表示优化后的第一转向控制,表示优化后的第二转向控制。
18、在其中的一些实施例中,所述通过stackelberg博弈均衡优化所述第一转向控制和所述第二转向控制,还包括:
19、根据所述第一转向控制序列和所述第二转向控制序列,通过轨迹预测模型得到所述车辆的预测轨迹。
20、在其中的一些实施例中,所述轨迹预测模型为:
21、y(k)=ψkξ(k)+θ1ua(k)+θ2uc(k)
22、
23、
24、
25、a0=ta+e
26、b1a=tb1
27、b2c=tb2
28、其中,ξ(k)表示所述车辆的当前状态,c表示输出矩阵,np表示预测时域,a表示第一系数矩阵,b1表示第二系数矩阵,b2表示第三系数矩阵,t表示单位时间。
29、在其中的一些实施例中,所述轨迹预测模型通过人机协同控制模型连续迭代得到,所述人机协同控制模型用于根据所述第一转向控制、所述第二转向控制和所述车辆的当前状态确定所述车辆的下一状态;
30、所述第一系数矩阵为所述人机协同控制模型中所述车辆的当前状态的系数矩阵,所述第二系数矩阵为所述人机协同控制模型中所述第一转向控制的系数矩阵,所述第三系数矩阵为所述人机协同控制模型中所述第二转向控制的系数矩阵。
31、在其中的一些实施例中,所述以最小化所述驾驶员和所述驾驶辅助系统的代价函数为目标,通过stackelberg博弈均衡优化控制时域内的第一转向控制序列和第二转向控制序列,包括:
32、确定所述驾驶辅助系统对所述驾驶员的动作响应;
33、根据所述驾驶辅助系统对所述驾驶员的动作响应确定优化后的所述第一转向控制序列;
34、根据优化后的所述第一转向控制序列和所述驾驶辅助系统对所述驾驶员的动作响应确定优化后的第二转向控制序列。
35、第二个方面,在本发明中提供了一种人机协同转向控制装置,用于控制车辆的转向,所述装置包括:
36、控制获取模块,用于获取第一转向控制和第二转向控制,所述第一转向控制为驾驶员的当前控制输入,所述第二转向控制为驾驶辅助系统的当前控制输入;
37、控制优化模块,用于通过stackelberg博弈均衡优化所述第一转向控制和所述第二转向控制;
38、控制输出模块,用于将优化后的第一转向控制和第二转向控制的叠加结果输出至所述车辆的转向系统。
39、第三个方面,在本发明中提供了一种电子设备,包括存储器、处理器以及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述第一个方面所述的方法。
40、第四个方面,在本发明中提供了一种存储介质,其上存储有计算机程序,该程序被处理器执行时实现上述第一个方面所述的方法。
41、与相关技术相比,在本发明中提供的人机协同转向控制方法、装置、电子设备和存储介质,在驾驶员和驾驶辅助系统的驾驶意图出现不一致时,会通过stackelberg博弈思想去平衡两者驾驶意图。具体的,当第一转向控制和第二转向控制不一致时,通过stackelberg博弈方法均衡优化所述第一转向控制和所述第二转向控制,然后将优化后的第一转向控制和第二转向控制进行相加得到最终转向控制并将其发送给车辆的转向系统,使得车辆基于最终转向控制行驶。其中,stackelberg博弈方法会较好的平衡驾驶员和驾驶辅助系统的驾驶意图,当驾驶员与驾驶辅助系统控制意图不一致时也不会引起人机的控制输入冲突,从而保证了车辆行驶的安全性。因此,解决了现有的车辆人机协同控制方法存在安全性低的问题。
42、本申请的一个或多个实施例的细节在以下附图和描述中提出,以使本申请的其他特征、目的和优点更加简明易懂。
技术特征:
1.一种人机协同转向控制方法,用于控制车辆的转向,其特征在于,所述方法包括:
2.根据权利要求1所述的人机协同转向控制方法,其特征在于,所述通过stackelberg博弈均衡优化所述第一转向控制和所述第二转向控制,包括:
3.根据权利要求2所述的人机协同转向控制方法,其特征在于,所述第一转向控制序列和所述第二转向控制序列的优化目标为:
4.根据权利要求3所述的人机协同转向控制方法,其特征在于,所述通过stackelberg博弈均衡优化所述第一转向控制和所述第二转向控制,还包括:
5.根据权利要求4所述的人机协同转向控制方法,其特征在于,所述轨迹预测模型为:
6.根据权利要求5所述的人机协同转向控制方法,其特征在于,所述轨迹预测模型通过人机协同控制模型连续迭代得到,所述人机协同控制模型用于根据所述第一转向控制、所述第二转向控制和所述车辆的当前状态确定所述车辆的下一状态;
7.根据权利要求5所述的人机协同转向控制方法,其特征在于,所述以最小化所述驾驶员和所述驾驶辅助系统的代价函数为目标,通过stackelberg博弈均衡优化控制时域内的第一转向控制序列和第二转向控制序列,包括:
8.一种人机协同转向控制装置,用于控制车辆的转向,其特征在于,所述装置包括:
9.一种电子设备,包括存储器和处理器,其特征在于,所述存储器中存储有计算机程序,所述处理器被设置为运行所述计算机程序以执行权利要求1至7中任一项所述的人机协同转向控制方法。
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至7中任一项所述的人机协同转向控制方法的步骤。
技术总结
本申请涉及一种人机协同转向控制方法、装置、电子设备和存储介质,其中,该人机协同转向控制方法包括:获取第一转向控制和第二转向控制,所述第一转向控制为驾驶员的当前控制输入,所述第二转向控制为驾驶辅助系统的当前控制输入;通过Stackelberg博弈均衡优化所述第一转向控制和所述第二转向控制;将优化后的第一转向控制和第二转向控制的叠加结果输出至所述车辆的转向系统。Stackelberg博弈方法会较好的平衡驾驶员和驾驶辅助系统的驾驶意图,当驾驶员与驾驶辅助系统控制意图不一致时也不会引起人机的控制输入冲突,从而保证了车辆行驶的安全性。因此,解决了现有的车辆人机协同控制方法存在安全性低的问题。
技术研发人员:王宁,高振刚,李鹏洲,汪洪波
受保护的技术使用者:内蒙古工业大学
技术研发日:
技术公布日:2024/4/7
- 还没有人留言评论。精彩留言会获得点赞!