一种适用于自动驾驶操控台的翻转系统的制作方法
1.本实用新型涉及轨道车辆及自动驾驶技术领域,具体是一种用于在人工操作和自动驾驶操作之间进行截面切换的操控台翻转系统。
背景技术:
2.轨道交通作为运输工具而言具有多方面的优点:舒适,准时,快捷,占地少,环保节能等,符合中国的可持续发展战略,给城市和地区之间的快速发展注入活力。随着轨道线路和运能的不断增长,对于轨道车辆的智能无人驾驶的需求越来越高。现有的无人驾驶操控台均是在现有操控面板的基础上,增加外罩板的方式来实现操作截面的切换、遮挡进而防止误操作的可能,如此设计较简陋原始,且依赖人工操作,智能化程度低,在使用上存在偶然性和不确定性。
技术实现要素:
3.本实用新型的目的在于克服上述缺陷,提出一种切换过程全自动并且保留人工紧急介入功能的适用于自动驾驶操控台的翻转系统。
4.为了达到上述目的,本实用新型是这样实现的:
5.一种适用于自动驾驶操控台的翻转系统,包括人工操作台面、自动操作台面,还包括翻转机构、水平推移机构,所述水平推移机构推动自动操作台面按既定轨迹前进或后退,所述翻转机构驱动自动操作台面围绕既定转点做翻转动作;如此,自动操作台面在水平推移机构的推动下沿既定轨迹接近或远离人工操作台面,且在翻转机构的驱动下,翻转并罩盖人工操作台面或在翻转机构的驱动下向上翻转并露出人工操作台面。
6.所述的适用于自动驾驶操控台的翻转系统,水平推移机构包括伺服电动缸、支架、伸缩导轨和滑移平台,伺服电动缸、伸缩导轨均设置在支架上,伸缩导轨分别与伺服电动缸及滑移平台连接,如此,在伺服电动缸的驱动下,伸缩导轨驱动滑移平台实现水平推移动作。
7.所述的适用于自动驾驶操控台的翻转系统,翻转机构包括旋转伺服电机、转轴、连接座和连接臂,所述翻转机构通过连接座而与水平推移机构连接,旋转伺服电机设置在连接座上且旋转伺服电机与转轴连接,转轴插设在连接座中并在旋转伺服电机的驱动下沿其自身轴线做旋转,在转轴上套设连接臂,所述连接臂用于与自动操作台面连接。
8.所述的适用于自动驾驶操控台的翻转系统,自动操作台面上设置可翻转的罩盖。
9.所述的适用于自动驾驶操控台的翻转系统,伸缩导轨为滚珠导轨或滚子导轨。
10.所述的适用于自动驾驶操控台的翻转系统,翻转机构还包括旋转限位装置,该旋转限位装置设置在转轴上,其为角度传感器或靠近开关或限位挡板中的至少一种,该旋转限位装置与旋转伺服电机连接,并向旋转伺服电机传送旋转角度信号。
11.本翻转系统的主要驱动部件都采用了电动伺服形式的驱动部件,而运行部件则同样采用了运行平稳精准的滚子或滚珠导轨。如此,本翻转系统与传统人力操作的罩盖形式
而言,具有以下优势:
12.1、本机构由电机和电动缸驱动,因而可满足实现大尺寸,大重量的地铁无人驾驶台的整体翻转动作,并且采用双伺服控制系统,运行精密。
13.2、本机构采用高精密大扭矩伺服旋转电机和伺服电缸控制机构的旋转和滑行动作,具有载重量大,控制便捷,动作平稳的优点。
14.3、结构支撑部分采用高强度铝材,在满足结构强度的前提下,实现轻量化结构。
附图说明
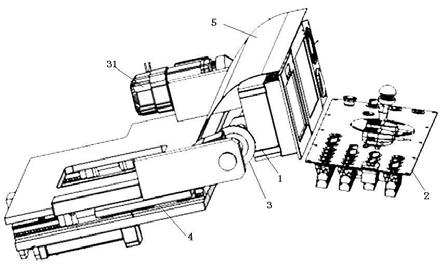
15.图1为本翻转系统使用状态示意图。
16.图2为本翻转系统中水平推移机构的结构示意图。
17.图3为本翻转系统中翻转机构的结构示意图。
18.图4为本翻转系统中水平推移机构与翻转机构的连接示意图。
具体实施方式
19.以下通过具体实施例进一步说明本实用新型。
20.如图1、图4所示,一种适用于自动驾驶操控台的翻转系统,包括人工操作台面1、自动操作台面2,还包括翻转机构3、水平推移机构4,所述水平推移机构4推动自动操作台面2按既定轨迹前进或后退,所述翻转机构3驱动自动操作台2面围绕既定转点做翻转动作;如此,自动操作台面2在水平推移机构4的推动下沿既定轨迹接近或远离人工操作台面1,且在翻转机构3的驱动下,翻转并罩盖人工操作台面1或在翻转机构3的驱动下向上翻转并露出人工操作台面1。
21.所述的适用于自动驾驶操控台的翻转系统,水平推移机构4包括伺服电动缸41、支架42、伸缩导轨43和滑移平台44,伺服电动缸41、伸缩导轨43均设置在支架42上,伸缩导轨43分别与伺服电动缸41及滑移平台44连接,如此,在伺服电动缸41的驱动下,伸缩导轨43驱动滑移平台44实现水平推移动作。
22.所述的适用于自动驾驶操控台的翻转系统,翻转机构3包括旋转伺服电机31、转轴32、连接座33和连接臂34,所述翻转机构3通过连接座33而与水平推移机构4连接,旋转伺服电机31设置在连接座33上且旋转伺服电机31与转轴32连接,转轴32插设在连接座33中并在旋转伺服电机31的驱动下沿其自身轴线做旋转,在转轴32上套设连接臂34,所述连接臂34用于与自动操作台面2连接。
23.所述的适用于自动驾驶操控台的翻转系统,自动操作台面2上设置可翻转的罩盖5。
24.所述的适用于自动驾驶操控台的翻转系统,伸缩导轨43为滚珠导轨或滚子导轨。
25.所述的适用于自动驾驶操控台的翻转系统,翻转机构3还包括旋转限位装置35,该旋转限位装置35设置在转轴32上,其为角度传感器或靠近开关或限位挡板中的至少一种,该旋转限位装置35与旋转伺服电机31连接,并向旋转伺服电机31传送旋转角度信号。
26.实际使用时,将自动操作台面2焊接在转轴32的两片连接臂34上,通过物理限位的隔离限位法兰来提供操控台安装时的定位功能,所有的沿着传动轴进行布线,最后通过150mm宽的拖链进行固定,降低在旋转时(最大约120
°
)和平行移动时对线缆的受力。
27.进一步,在实际使用时,本机构采用20mm厚 6061高强度铝合金板作为旋转机构和滑动机构的结构支撑,采用伺服电动缸作为整个机构和滑出动力,额定推力2kn ,最大行程300mm,重复精度0.03mm,最大速度 100mm/s,具有推力大,运行平顺,重复精度高的优势。
技术特征:
1.一种适用于自动驾驶操控台的翻转系统,包括人工操作台面、自动操作台面,其特征是:还包括翻转机构、水平推移机构,所述水平推移机构推动自动操作台面按既定轨迹前进或后退,所述翻转机构驱动自动操作台面围绕既定转点做翻转动作;如此,自动操作台面在水平推移机构的推动下沿既定轨迹接近或远离人工操作台面,且在翻转机构的驱动下,翻转并罩盖人工操作台面或在翻转机构的驱动下向上翻转并露出人工操作台面。2.根据权利要求1所述的适用于自动驾驶操控台的翻转系统,其特征是:水平推移机构包括伺服电动缸、支架、伸缩导轨和滑移平台,伺服电动缸、伸缩导轨均设置在支架上,伸缩导轨分别与伺服电动缸及滑移平台连接,如此,在伺服电动缸的驱动下,伸缩导轨驱动滑移平台实现水平推移动作。3.根据权利要求1所述的适用于自动驾驶操控台的翻转系统,其特征是:翻转机构包括旋转伺服电机、转轴、连接座和连接臂,所述翻转机构通过连接座而与水平推移机构连接,旋转伺服电机设置在连接座上且旋转伺服电机与转轴连接,转轴插设在连接座中并在旋转伺服电机的驱动下沿其自身轴线做旋转,在转轴上套设连接臂,所述连接臂用于与自动操作台面连接。4.根据权利要求1或3所述的适用于自动驾驶操控台的翻转系统,其特征是:自动操作台面上设置可翻转的罩盖。5.根据权利要求2所述的适用于自动驾驶操控台的翻转系统,其特征是:伸缩导轨为滚珠导轨或滚子导轨。6.根据权利要求3所述的适用于自动驾驶操控台的翻转系统,其特征是:翻转机构还包括旋转限位装置,该旋转限位装置设置在转轴上,其为角度传感器或靠近开关或限位挡板中的至少一种,该旋转限位装置与旋转伺服电机连接,并向旋转伺服电机传送旋转角度信号。
技术总结
本实用新型涉及轨道车辆及自动驾驶技术领域,具体是一种用于在人工操作和自动驾驶操作之间进行截面切换的操控台翻转系统;包括人工操作台面、自动操作台面,还包括翻转机构、水平推移机构,水平推移机构推动自动操作台面按既定轨迹前进或后退,翻转机构驱动自动操作台面围绕既定转点做翻转动作;自动操作台面在水平推移机构的推动下沿既定轨迹接近或远离人工操作台面,且在翻转机构的驱动下,翻转并罩盖人工操作台面或在翻转机构的驱动下向上翻转并露出人工操作台面。本机构由电机和电动缸驱动,因而可满足实现大尺寸,大重量的地铁无人驾驶台的整体翻转动作,并且采用双伺服控制系统,具有运行精密、平稳,控制便捷,动作精准的优点。的优点。的优点。
技术研发人员:吕元颖 杨苑斐 张海军 尹力明 雷英鹏 霍东霄
受保护的技术使用者:上海轨道交通设备发展有限公司
技术研发日:2021.06.29
技术公布日:2022/4/1
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1