一种列车运行控制方法、电子设备及储存介质与流程
本发明涉及列车信号控制系统,尤其是涉及一种列车运行控制方法、电子设备及储存介质。
背景技术:
1、在城市轨道交通运营中,当车载vobc出现故障无法恢复时,通常做法是由司机重启列车,之后由司机人工驾驶列车通过2个连续信标实现重定位后,可升级到cbtc运营模式。特别是全自动运行线路中,设备故障时,系统已支持远程重启设备功能,车载vobc远程重启后,列车将处于失位状态,无法立即以fam模式控制列车继续运行,仍需派遣司机上车通过手动驾驶控制列车重定位,整个故障处理至运营恢复的处理时间比较长,对运营的延误影响非常大,以及故障失位列车也存在类似恢复运营处理时间比较长的问题。可见,现有技术在列车重启或故障失位后,若车上没有司机时,恢复运营的方案仍存在缺陷。
2、因此如何来快速恢复故障列车的全自动运行运营,成为需要解决的技术问题。
技术实现思路
1、本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种列车运行控制方法、电子设备及储存介质。
2、本发明的目的可以通过以下技术方案来实现:
3、根据本发明的第一方面,提供了一种列车运行控制方法,该方法在列车重启或故障失位后,调度员远程确认列车进入远程限制人工驾驶模式rrm,车载vobc自动控制列车限速运行,通过任一信标后升级为全自动运行驾驶模式fam,从而自动恢复运营。
4、作为优选的技术方案,该方法包括以下步骤:
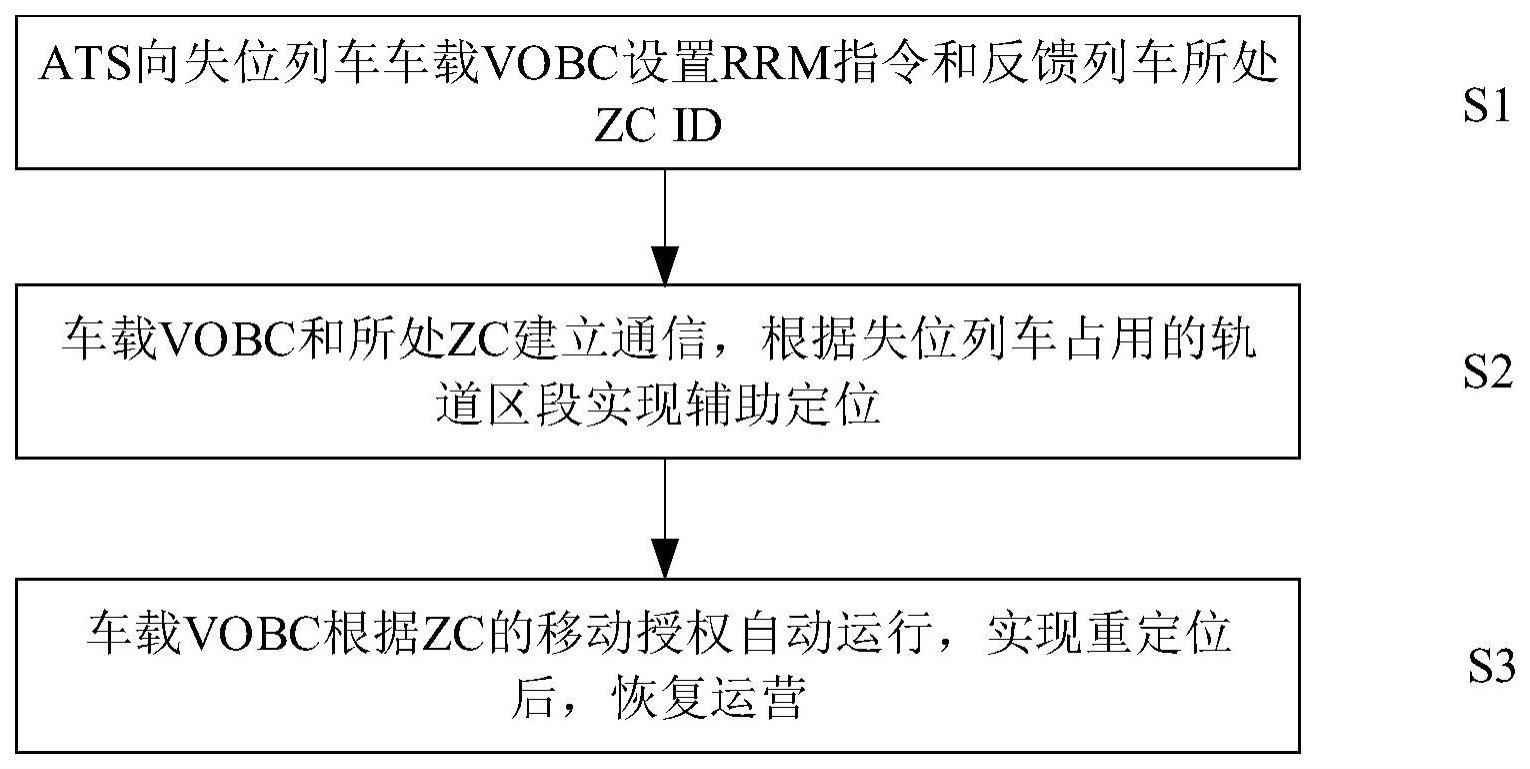
5、步骤s1,ats向失位列车车载vobc设置rrm指令和反馈列车所处zc id;
6、步骤s2,车载vobc和所处zc建立通信,根据失位列车占用的轨道区段实现辅助定位;
7、步骤s3,车载vobc根据zc的移动授权自动运行,实现重定位后,恢复运营。
8、作为优选的技术方案,所述步骤s1具体为:
9、步骤s101、列车重启或故障失位后,提示调度员确认进入rrm;
10、步骤s102、调度员确认后,ats向车载vobc发送设置rrm指令和其所处位置信息zcid。
11、作为优选的技术方案,所述步骤s101中,列车重启或故障失位后,车载vobc与ats自动建立通信,并向ats发送是否进入rrm请求,用于提示调度员确认。
12、作为优选的技术方案,所述步骤s102中,ats根据来自建立通信的失位列车vobcid和zc追踪的该失位列车ntap位置,计算失位列车所处的zc id。
13、作为优选的技术方案,所述步骤s102中,一旦通信列车进入cbtc区域后,即使列车断通信或失位,zc也能根据轨道区段占用信息计算失位列车位置。
14、作为优选的技术方案,所述步骤s2具体为:
15、步骤s103、车载vobc进入rrm驾驶模式,并根据收到的所处zc id信息向对应zc请求建立通信;
16、步骤s104、车载vobc向对应zc发送失位rrm辅助定位请求;
17、步骤s105、zc将失位列车的rrm辅助定位信息反馈给车载vobc;
18、步骤s106、车载vobc根据辅助定位信息实现rrm辅助定位,并给zc反馈rrm辅助定位报告。
19、作为优选的技术方案,所述步骤s103中,zc根据车载vobc注册信息的vobc id,安全校核该失位列车是否在本zc区域内。
20、作为优选的技术方案,所述步骤s105中,zc根据车载vobc失位rrm辅助定位请求计算相应vobc辅助定位信息,包括失位列车占用的轨道区段和所关联的道岔信息。
21、作为优选的技术方案,所述步骤s3具体为:
22、步骤s107、zc根据轨旁设备状态、vobc的rrm辅助定位报告和列车运行速度信息,为rrm驾驶模式列车计算移动授权;
23、步骤s108、调度员为rrm列车设置发车确认后,列车根据zc的移动授权自动限速运行;
24、步骤s109、rrm驾驶模式列车通过任一信标后实现重定位,不停车切换至全自动运行驾驶模式fam,恢复运营。
25、作为优选的技术方案,所述步骤s107中,rrm驾驶模式列车为能量监控驾驶模式,车载vobc能进行位置监控和能量监控,安全控制列车运行。
26、作为优选的技术方案,所述步骤s109中,rrm驾驶模式列车运行设定距离后,若还未实现定位,将退出rrm驾驶模式。
27、作为优选的技术方案,所述步骤s109中,rrm驾驶模式列车为cbtc运营模式,vobc向zc发送辅助定位位置报文,zc向rrm列车反馈前方可运行距离。
28、根据本发明的第二方面,提供了一种电子设备,包括存储器和处理器,所述存储器上存储有计算机程序,所述处理器执行所述程序时实现所述的方法。
29、根据本发明的第三方面,提供了一种计算机可读存储介质,其上存储有计算机程序,所述程序被处理器执行时实现所述的方法。
30、与现有技术相比,本发明具有以下优点:
31、1、本发明设计了一种远程rm驾驶模式,可由中心调度员远程控制故障失位列车启动,且通过信标后恢复正常,提升了线路故障应对的自动化程度,极大地降低了故障列车对运营的影响;
32、2、本发明设计了一种远程rm驾驶模式,系统通过轨道区段对失位列车实现初始化辅助定位,vobc和zc根据初始化辅助定位对故障列车的运行速度和运行距离进行安全监督,保障了故障列车恢复运营过程中的行车安全;
33、3、本发明设计了zc根据轨道区段占用信息识别失位列车位置,失位列车请求rrm时,包含了其vobc id,zc检查其追踪的失位列车vobc id和失位rrm请求辅助定位列车的vobc id一致后,才向失位列车反馈辅助定位信息,确保了失位列车识别的正确性和安全性;
34、4、本发明设计了故障列车通过一个信标后,即可根据zc授权运行方向和信标位置实现故障恢复,减少了故障恢复的时间,降低列车重启或故障失位对运营的影响。
技术特征:
1.一种列车运行控制方法,其特征在于,该方法在列车重启或故障失位后,通过调度员远程确认列车进入远程限制人工驾驶模式rrm,车载vobc自动控制列车限速运行,通过任一信标后升级为全自动运行驾驶模式fam,从而自动恢复运营。
2.根据权利要求1所述的一种列车运行控制方法,其特征在于,该方法包括以下步骤:
3.根据权利要求2所述的一种列车运行控制方法,其特征在于,所述步骤s1具体为:
4.根据权利要求3所述的一种列车运行控制方法,其特征在于,所述步骤s101中,列车重启或故障失位后,车载vobc与ats自动建立通信,并向ats发送是否进入rrm请求,用于提示调度员确认。
5.根据权利要求3所述的一种列车运行控制方法,其特征在于,所述步骤s102中,ats根据来自建立通信的失位列车vobc id和zc追踪的该失位列车ntap位置,计算失位列车所处的zc id。
6.根据权利要求3所述的一种列车运行控制方法,其特征在于,所述步骤s102中,一旦通信列车进入cbtc区域后,即使列车断通信或失位,zc也能根据轨道区段占用信息计算失位列车位置。
7.根据权利要求2所述的一种列车运行控制方法,其特征在于,所述步骤s2具体为:
8.根据权利要求7所述的一种列车运行控制方法,其特征在于,所述步骤s103中,zc根据车载vobc注册信息的vobc id,安全校核该失位列车是否在本zc区域内。
9.根据权利要求7所述的一种列车运行控制方法,其特征在于,所述步骤s105中,zc根据车载vobc失位rrm辅助定位请求计算相应vobc辅助定位信息,包括失位列车占用的轨道区段和所关联的道岔信息。
10.根据权利要求2所述的一种列车运行控制方法,其特征在于,所述步骤s3具体为:
11.根据权利要求10所述的一种列车运行控制方法,其特征在于,所述步骤s107中,rrm驾驶模式列车为能量监控驾驶模式,车载vobc能进行位置监控和能量监控,安全控制列车运行。
12.根据权利要求10所述的一种列车运行控制方法,其特征在于,所述步骤s109中,rrm驾驶模式列车运行设定距离后,若还未实现定位,将退出rrm驾驶模式。
13.根据权利要求10所述的一种列车运行控制方法,其特征在于,所述步骤s109中,rrm驾驶模式列车为cbtc运营模式,vobc向zc发送辅助定位位置报文,zc向rrm列车反馈前方可运行距离。
14.一种电子设备,包括存储器和处理器,所述存储器上存储有计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1~13中任一项所述的方法。
15.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述程序被处理器执行时实现如权利要求1~13中任一项所述的方法。
技术总结
本发明涉及一种列车运行控制方法、电子设备及储存介质,该方法在列车重启或故障失位后,通过调度员远程确认列车进入远程限制人工驾驶模式RRM,车载VOBC自动控制列车限速运行,通过任一信标后升级为全自动运行驾驶模式FAM,从而自动恢复运营。与现有技术相比,本发明具有提升了线路故障应对的自动化程度,极大地降低了故障列车对运营的影响等优点。
技术研发人员:胡荣华,王晓燕,刘晓辉,柴慧君
受保护的技术使用者:卡斯柯信号有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!