基于列车动力学模型的控车方法、装置及设备与流程
本公开涉及轨道交通,尤其涉及基于列车动力学模型的控车方法、装置及设备。
背景技术:
1、自动列车驾驶(automatic train operation,ato)系统是赋予地铁自动驾驶能力的核心保证,负责完成对列车的启动、牵引和制动等动作的控制。ato系统的关键功能是“列车速度控制”,列车运行控制方法的优劣,直接影响到列车的准时性、乘客舒适度、能耗和停车精度。因此理论研究和工程实际中,寻找更有效的列车自动运行控制方法成为一个重要方向。
2、现有的ato系统中常常采用pid控制器,其控制算法是基于偏差在过去、现在和将来做出调节量估计的一种简单而有效的控制算法。但在真实情况下,由于列车和轨道的物理磨损等原因,列车的真实性能情况与输入给ato系统的信息会存在一定的偏差,进而导致控制指令不精确,运行结束后列车的实际速度曲线与运行前的推荐速度曲线存在差距。这时,运行的能耗、乘客舒适度等评价指标都无法达到期望。
3、随着交通多源大数据的逐渐积累和人工智能技术的飞速发展,交通预测的相关研究进展取得了较大的进步,目前数据驱动的交通预测算法已经成为研究的主流,但利用预测技术辅助列车指令生成的技术应用十分稀少,目前还未发现公开报道的成熟产品。
技术实现思路
1、本公开提供了一种基于列车动力学模型的控车方法、装置及设备,用于辅助列车的控制系统生成控车指令,为精准控车提供了智能辅助。
2、根据本公开的第一方面,提供了一种基于列车动力学模型的控车方法。该方法包括:
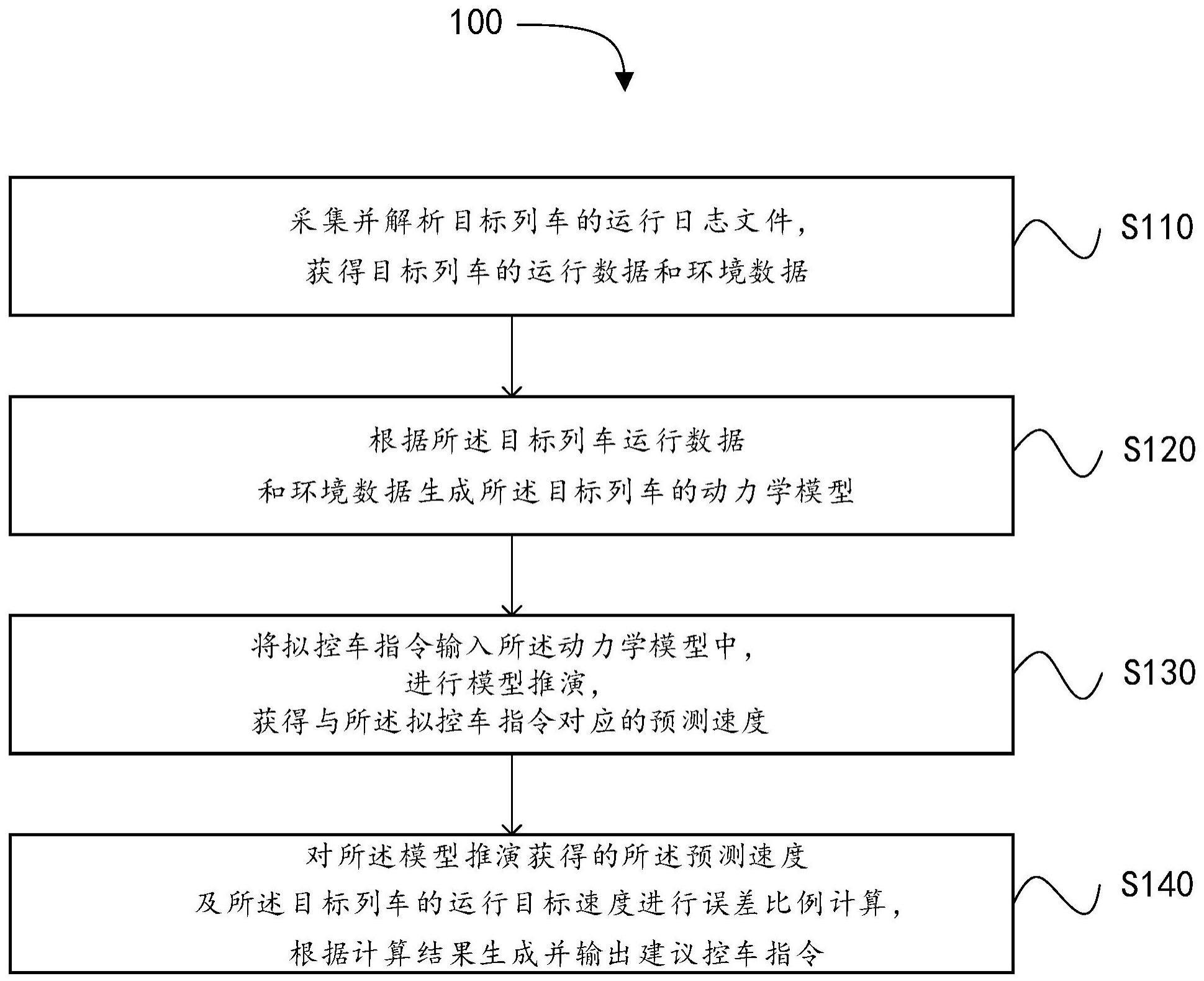
3、采集并解析目标列车的运行日志文件,获得目标列车的运行数据和环境数据;
4、根据目标列车运行数据和环境数据生成目标列车的动力学模型;
5、将拟控车指令输入动力学模型中,进行模型推演,获得与拟控车指令对应的预测速度;
6、对模型推演获得的预测速度及目标列车的运行目标速度进行误差比例计算,根据计算结果生成并输出建议控车指令。
7、在第一方面的一些可实现方式中,根据目标列车运行数据和环境数据构建目标列车的动力学模型,包括:
8、根据目标列车的运行数据和环境数据确定目标列车在对应时刻的列车速度、ato输出的模拟量、牵引状态、制动状态、保持制动和当前轨道坡度的数据,将每一时刻的列车速度、ato输出的模拟量、牵引状态、制动状态、保持制动和当前轨道坡度的数据作为样本,并将样本对应时刻的目标列车在m周期后的真实速度值作为训练标签;根据每一样本及其对应的标签生成训练集;
9、确定模型的评价指标,采用训练集进行模型训练,生成针对于目标列车的个性化动力学模型。
10、在第一方面的一些可实现方式中,模型的评价指标包括:
11、平均绝对误差mae、均方根误差rmse、决定系数r2、平均绝对百分比误差mape。
12、在第一方面的一些可实现方式中,进行模型推演,包括:
13、将拟控车指令输入动力学模型中,采取迭代预测法进行逐级迭代,直至预设迭代周期结束,获得与拟控车指令对应的预测速度。
14、在第一方面的一些可实现方式中,误差比例计算包括:
15、根据预测速度与运行目标速度的差异,利用速度差与级位差之间的对应关系,求解级位误差。
16、在第一方面的一些可实现方式中,根据计算结果生成并输出建议控车指令,包括:根据级位误差,对拟控车指令进行调整,生成并输出目标列车运行期间的建议控车指令。
17、在第一方面的一些可实现方式中,根据级位误差,对拟控车指令进行调整,生成并输出目标列车运行期间的建议控车指令,包括:
18、若预测速度小于运行目标速度,则根据所述级位误差对拟控车指令进行调整,对应增加牵引力或减小制动力,生成并输出建议控车指令;
19、若预测速度大于运行目标速度,则根据所述级位误差对拟控车指令进行调整,对应减小牵引力或增加制动力,生成并输出建议控车指令。
20、根据本公开的第二方面,提供了一种基于列车动力学模型的控车装置。该装置包括:
21、文件采集与解析模块,采集并解析目标列车的运行日志文件,获得目标列车的运行数据和环境数据;
22、模型生成模块,根据目标列车运行数据和环境数据生成目标列车的动力学模型;
23、模型推演模块,将拟控车指令输入动力学模型中进行模型推演,获得拟控车指令对应的预测速度;
24、误差比计算模块,对模型推演获得的预测速度及目标列车的运行目标速度进行误差比例计算;
25、指令生成模块,根据计算结果生成并输出建议控车指令。
26、根据本公开的第三方面,提供了一种电子设备。该电子设备包括:至少一个处理器;以及与至少一个处理器通信连接的存储器;存储器存储有可被至少一个处理器执行的指令,指令被至少一个处理器执行,以使至少一个处理器能够执行如以上所述的方法。
27、根据本公开的第四方面,提供了一种存储有计算机指令的非瞬时计算机可读存储介质,计算机指令用于使计算机执行如以上所述的方法。
28、在本公开中,利用列车历史运行数据,拟合列车本身的性能规律,并结合外界的各种行驶环境因素,多特征参与预测列车行驶速度,构建个性化的列车动力学模型;同时采用迭代预测法进行模型推演,获得预测速度,并根据预测速度与目标速度之间的误差,对拟控车指令进行调整,生成建议控车指令,为精准控车提供了智能辅助。
29、应当理解,
技术实现要素:
部分中所描述的内容并非旨在限定本公开的实施例的关键或重要特征,亦非用于限制本公开的范围。本公开的其它特征将通过以下的描述变得容易理解。
技术特征:
1.一种基于列车动力学模型的控车方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述根据所述目标列车运行数据和环境数据构建所述目标列车的动力学模型,包括:
3.根据权利要求2所述的方法,其特征在于,所述模型的评价指标包括:
4.根据权利要求1所述的方法,其特征在于,所述进行模型推演,包括:
5.根据权利要求1所述的方法,其特征在于,所述误差比例计算,包括:
6.根据权利要求5所述的方法,其特征在于,所述根据计算结果生成并输出建议控车指令,包括:
7.根据权利要求6所述的方法,其特征在于,所述根据所述级位误差,对所述拟控车指令进行调整,生成并输出所述建议控车指令,包括:
8.一种基于列车动力学模型的控车装置,其特征在于,包括:
9.一种电子设备,其特征在于,包括:
10.一种存储有计算机指令的非瞬时计算机可读存储介质,其特征在于,所述计算机指令用于使所述计算机执行根据权利要求1-7中任一项所述的方法。
技术总结
本公开的实施例提供了一种基于列车动力学模型的控车方法、装置及设备。所述方法包括:采集并解析目标列车的运行日志文件,获得目标列车的运行数据和环境数据;根据目标列车运行数据和环境数据生成目标列车的动力学模型;将拟控车指令输入动力学模型中,进行模型推演,获得与拟控车指令对应的预测速度;对模型推演获得的预测速度及目标列车的运行目标速度进行误差比例计算,根据计算结果生成并输出建议控车指令。以此方式,可以辅助列车的控制系统生成控车指令,为精准控车提供了智能辅助。
技术研发人员:孙铭,付哲
受保护的技术使用者:交控科技股份有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!