一种巡检机器人轨道限位装置的制作方法
1.本实用新型涉及建筑工程施工配件技术领域,更具体的是涉及巡检机器人轨道限位装置。
背景技术:
2.挂轨式巡检机器人多是通过驱动组件,在设置的轨道中进行移动,并在移动的过程中,通过摄像头进行巡检,可替代人工完成多种巡检、探测、监控等功能。挂轨式巡检机器人在运行过程中,由于操作失误、网络中断、系统失灵等原因,可能会出现巡检机器人行走失控、无法停止的现象,此时如果轨道端部悬空,很有可能致使巡检机器人跑出轨道,发生脱轨现象,进而损坏设备。
3.基于以上情况,人们在轨道端头设计缓冲器(以专利zl201420443026.9为例),以防止机器人冲出轨道,但是现有的挂轨缓冲限位装置不便于快速命令机器人停止,且缓冲限位装置通常不便于在挂轨上安装与拆卸。
技术实现要素:
4.本实用新型的目的在于:为了解决上述技术问题,本实用新型提供一种巡检机器人轨道限位装置,可在轨道端头急停巡检机器人,防止巡检机器人由于操作失误及技术故障而掉落轨道,同时结构简单便于在挂轨上安装与拆卸。
5.本实用新型为了实现上述目的具体采用以下技术方案:一种巡检机器人轨道限位装置,包括挂轨,所述挂轨的前后两侧夹持有固定支架,所述固定支架的外壁安装有限位板,所述限位板的前端面固定连接有弹性阻尼块,所述固定支架之间固定安装有夹持组件。
6.为了将两个支架板分别夹持在挂轨的两侧,作为本实用新型一种巡检机器人轨道限位装置优选的,所述固定支架包括有两个第一直角板,两个所述第一直角板相背的一侧均固定有第二直角板。
7.为了方便将固定支架与挂轨固定安装,作为本实用新型一种巡检机器人轨道限位装置优选的,两个所述第一直角板相对的一侧通过螺栓与挂轨可拆卸连接。
8.为了方便将固定支架与限位板固定安装,作为本实用新型一种巡检机器人轨道限位装置优选的,两个所述第二直角板的前侧均通过螺栓与限位板可拆卸连接。
9.为了方便限定固定支架的位置以便对其进行固定安装,作为本实用新型一种巡检机器人轨道限位装置优选的,所述夹持组件包括有两个固定板,两个所述固定板之间固定连接有伸缩杆和弹簧,所述弹簧与伸缩杆套装。
10.为了将固定之间与夹持组件固定安装,作为本实用新型一种巡检机器人轨道限位装置优选的,两个所述固定板分别与两个第一直角板固定安装。
11.本实用新型的有益效果如下:
12.1、通过将固定支架与挂轨固定安装,当巡检机器人移动至挂轨端头处时,弹性阻尼块与急停按钮接触,进而按压急停按钮使机器人停止运行,从而减小机器人掉落轨道的
风险;
13.2、安装整体限位装置时,两个第一直角板夹持挂轨,此时固定支架存在下滑的风险,通过设置夹持组件,使用时弹簧自然收缩并带动两个固定板向中间方向移动,进而带动减小两个第一直角板之间的距离,进一步使固定支架夹持挂轨,从而防止固定支架下滑,以便工作人员在挂轨外侧安装整体缓冲限位装置。
附图说明
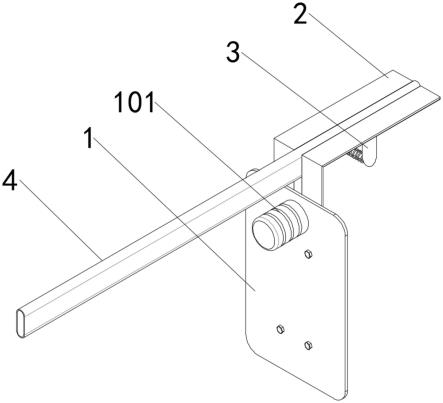
14.图1是本实用新型的结构示意图;
15.图2是本实用新型的前视图;
16.图3是本实用新型的右视图;
17.图4是本实用新型的俯视图;
18.图5是固定支架和夹持组件的结构示意图;
19.图6是固定支架和夹持组件的后视图。
20.附图标记:1、限位板;101、弹性阻尼块;2、固定支架;201、第一直角板;202、第二直角板;3、夹持组件;301、固定板;302、伸缩杆;303、弹簧;4、挂轨。
具体实施方式
21.下面将结合附图以及具体实施例来详细说明本实用新型,在此本实用新型的示意性实施例以及说明来解释本实用新型,但并不作为对本实用新型的限定。
22.在本实用新型的描述中,需要理解的是,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
23.请参阅图1-6,本实用新型提供以下技术方案:一种巡检机器人轨道限位装置,包括挂轨4,挂轨4的前后两侧夹持有固定支架2,固定支架2的外壁安装有限位板1,限位板1的前端面固定连接有弹性阻尼块101,固定支架2之间固定安装有夹持组件3。
24.本实施例中:通过将固定支架2夹持在挂轨4的外侧,使弹性阻尼块101的前端对准巡检机器人的急停开关按钮,确定固定支架2的位置后,夹持组件3可对固定支架2达到一定限位效果,再将固定支架2与挂轨4固定安装,当巡检机器人移动至挂轨4端头处时,弹性阻尼块101与急停按钮接触,进而按压急停按钮使机器人停止运行,从而减小机器人掉落轨道的风险。
25.作为本实用新型的一种技术优化方案,固定支架2包括有两个第一直角板201,两个第一直角板201相背的一侧均固定有第二直角板202,两个第一直角板201相对的一侧通过螺栓与挂轨4可拆卸连接,两个第二直角板202的前侧均通过螺栓与限位板1可拆卸连接。
26.本实施例中:通过设置两个第一直角板201分别夹持在挂轨4两侧,可方便挂轨4与固定支架2固定安装,通过设置两个第二直角板202,可方便固定支架2与限位板1固定安装。
27.作为本实用新型的一种技术优化方案,夹持组件3包括有两个固定板301,两个固定板301之间固定连接有伸缩杆302和弹簧303,弹簧303与伸缩杆302套装,两个固定板301分别与两个第一直角板201固定安装。
28.本实施例中:安装整体限位装置时,两个第一直角板201夹持挂轨4,此时固定支架2存在下滑的风险,通过设置夹持组件3,使用时弹簧303自然收缩并带动两个固定板301向中间方向移动,进而带动减小两个第一直角板201之间的距离,进一步使固定支架2夹持挂轨4,从而防止固定支架2下滑,以便工作人员在挂轨4外侧安装固定支架2。
29.本实用新型的工作原理及使用流程:两个第一直角板201夹持挂轨4,此时固定支架2存在下滑的风险,弹簧303自然收缩并带动两个固定板301向中间方向移动,进而带动减小两个第一直角板201之间的距离,使固定支架2夹持挂轨4,两个第一直角板201相对的一侧通过螺栓与挂轨4可拆卸连接,当巡检机器人移动至挂轨4端头处时,弹性阻尼块101与急停按钮接触,进而按压急停按钮使机器人停止运行。
30.以上对本实用新型实施例所提供的技术方案进行了详细介绍,本文中应用了具体个例对本实用新型实施例的原理以及实施方式进行了阐述,以上实施例的说明只适用于帮助理解本实用新型实施例的原理,同时,对于本领域的一般技术人员,依据本实用新型实施例,在具体实施方式以及应用范围上均会有改变之处,综上,本说明书内容不应理解为对本实用新型的限制。
技术特征:
1.一种巡检机器人轨道限位装置,包括挂轨(4),其特征在于:所述挂轨(4)的前后两侧夹持有固定支架(2),所述固定支架(2)的外壁安装有限位板(1),所述限位板(1)的前端面固定连接有弹性阻尼块(101),所述固定支架(2)之间固定安装有夹持组件(3)。2.根据权利要求1所述的一种巡检机器人轨道限位装置,其特征在于:所述固定支架(2)包括有两个第一直角板(201),两个所述第一直角板(201)相背的一侧均固定有第二直角板(202)。3.根据权利要求2所述的一种巡检机器人轨道限位装置,其特征在于:两个所述第一直角板(201)相对的一侧通过螺栓与挂轨(4)可拆卸连接。4.根据权利要求2所述的一种巡检机器人轨道限位装置,其特征在于:两个所述第二直角板(202)的前侧均通过螺栓与限位板(1)可拆卸连接。5.根据权利要求2所述的一种巡检机器人轨道限位装置,其特征在于:所述夹持组件(3)包括有两个固定板(301),两个所述固定板(301)之间固定连接有伸缩杆(302)和弹簧(303),所述弹簧(303)与伸缩杆(302)套装。6.根据权利要求5所述的一种巡检机器人轨道限位装置,其特征在于:两个所述固定板(301)分别与两个第一直角板(201)固定安装。
技术总结
本实用新型公开了一种巡检机器人轨道限位装置,涉及建筑工程施工配件技术领域,包括挂轨,所述挂轨的前后两侧夹持有固定支架,所述固定支架的外壁安装有限位板,所述限位板的前端面固定连接有弹性阻尼块,所述固定支架之间固定安装有夹持组件;该巡检机器人轨道限位装置,通过限位板可作用于巡检机器人的激光限位、超声波限位等感应限位,促使机器人紧急停车,且该装置通过限位板正面安装的弹性阻尼块,正对于机器人的急停按钮,当感应限位失效时,可采用碰撞方式,促使弹性阻尼器触碰机器人的急停按钮,达到急停的效果,该限位装置有双重限位的作用,同时通过设置固定支架与夹持组件相配合,可方便工作人员快速在挂轨上安装缓冲限位装置。缓冲限位装置。缓冲限位装置。
技术研发人员:姚爱国 宋凯 王小雷 汪广田 巢世霞 曹渊博 谢健康
受保护的技术使用者:金川集团股份有限公司
技术研发日:2022.09.29
技术公布日:2023/3/13
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1