一种自运行快速铁路轨道检查仪的抓手机构的制作方法
本技术涉及轨道检查仪,更具体的是涉及自运行快速铁路轨道检查仪的抓手机构。
背景技术:
1、轨道检查仪是一种检测铁路轨道的静态几何参数的检测设备,主要用于评价铁路轨道是否平顺。
2、当轨道检查仪安装在小车的车架下端,小车带动轨道检查仪沿铁轨行进时,如果遇到道岔或小车运动速度较快时,轨道检查仪容易和小车脱落,使得轨道检查仪受到损害。
技术实现思路
1、本实用新型的目的在于:为了解决遇到道岔或小车运动速度较快时,轨道检查仪容易脱离小车的技术问题,本实用新型提供一种自运行快速铁路轨道检查仪的抓手机构。
2、本实用新型为了实现上述目的具体采用以下技术方案:
3、一种自运行快速铁路轨道检查仪的抓手机构,包括抓起轨道检查仪纵梁的纵梁抓手和抓起轨道检查仪横梁的横梁抓手,所述纵梁抓手包括纵梁爪部和设在小车上的纵梁安装架,所述纵梁安装架上设有带动纵梁爪部升降的纵梁升降机构。
4、进一步地,所述纵梁爪部包括位于x-z平面内的纵梁固定部,所述纵梁固定部上设有沿y方向分布的纵梁固定杆,所述纵梁固定杆转动设有纵梁转动部,所述纵梁转动部的转轴沿x方向分布,所述纵梁转动部位于y-z平面,所述纵梁固定杆上设有驱动纵梁转动部旋转的纵梁推动机构,所述纵梁固定部和纵梁转动部之间形成夹持轨道检查仪纵梁的纵梁夹持空间。
5、进一步地,所述纵梁固定部和纵梁转动部相对一侧设有缓冲层,避免纵梁抓手对轨道检查仪进行抓取时,轨道检查仪受到损害。
6、进一步地,所述纵梁推动机构包括沿y方向分布的纵梁电动推杆,所述纵梁电动推杆的输出端和纵梁转动部相连接。
7、进一步地,所述纵梁升降机构为丝杆电机结构或电动推杆结构。
8、进一步地,所述横梁抓手包括横梁爪部和设在小车上的横梁安装架,所述横梁安装架上设有带动横梁爪部升降的横梁升降机构。
9、进一步地,所述横梁爪部包括位于x-z平面内的横梁固定部,所述横梁固定部沿x方向两端转动设有横梁转动部,两个横梁转动部的转轴沿y方向分布,两个横梁转动部位于x-z平面内,两个横梁转动部之间设有带动横梁转动部旋转的横梁推动机构并且形成夹持轨道检查仪横梁的横梁夹持空间。
10、进一步地,所述横梁转动部相对于横梁固定部对称设置。
11、进一步地,所述横梁推动机构包括沿y方向分布的横梁电动推杆,所述横梁电动推杆滑动设在横梁固定部上,固定端和一个横梁转动部相连接,输出端和另一个横梁转动部相连接,所述横梁固定部上对应每个横梁转动部设有转动连杆,所述转动连杆一端和横梁固定部转动连接,另一端和横梁固定部转动连接。
12、进一步地,所述转动连杆和横梁固定部的连接处位于横梁固定部沿x方向的中间位置。
13、进一步地,所述横梁升降机构为丝杆电机结构或电动推杆结构。
14、本实用新型的有益效果如下:
15、(1)通过纵梁抓手抓起轨道检查仪纵梁,横梁抓手抓起轨道检查仪横梁,使得轨道检查仪和铁轨脱离,方便携带轨道检查仪的小车通过道岔或快速运动,当小车经过道岔或慢速运动时,纵梁抓手和横梁抓手松开轨道检查仪,使得轨道检查仪和铁轨相接触,方便轨道检查仪跟随小车进行静态几何参数的检测;
16、(2)纵梁电动推杆带动纵梁转动部旋转,调整纵梁转动部和纵梁固定部的间距,以夹持和松开纵梁,横梁电动推杆带动横梁转动部旋转,另一个横梁转动部在横梁电动推杆的反作用力下反向旋转,以夹持和松开横梁。
技术特征:
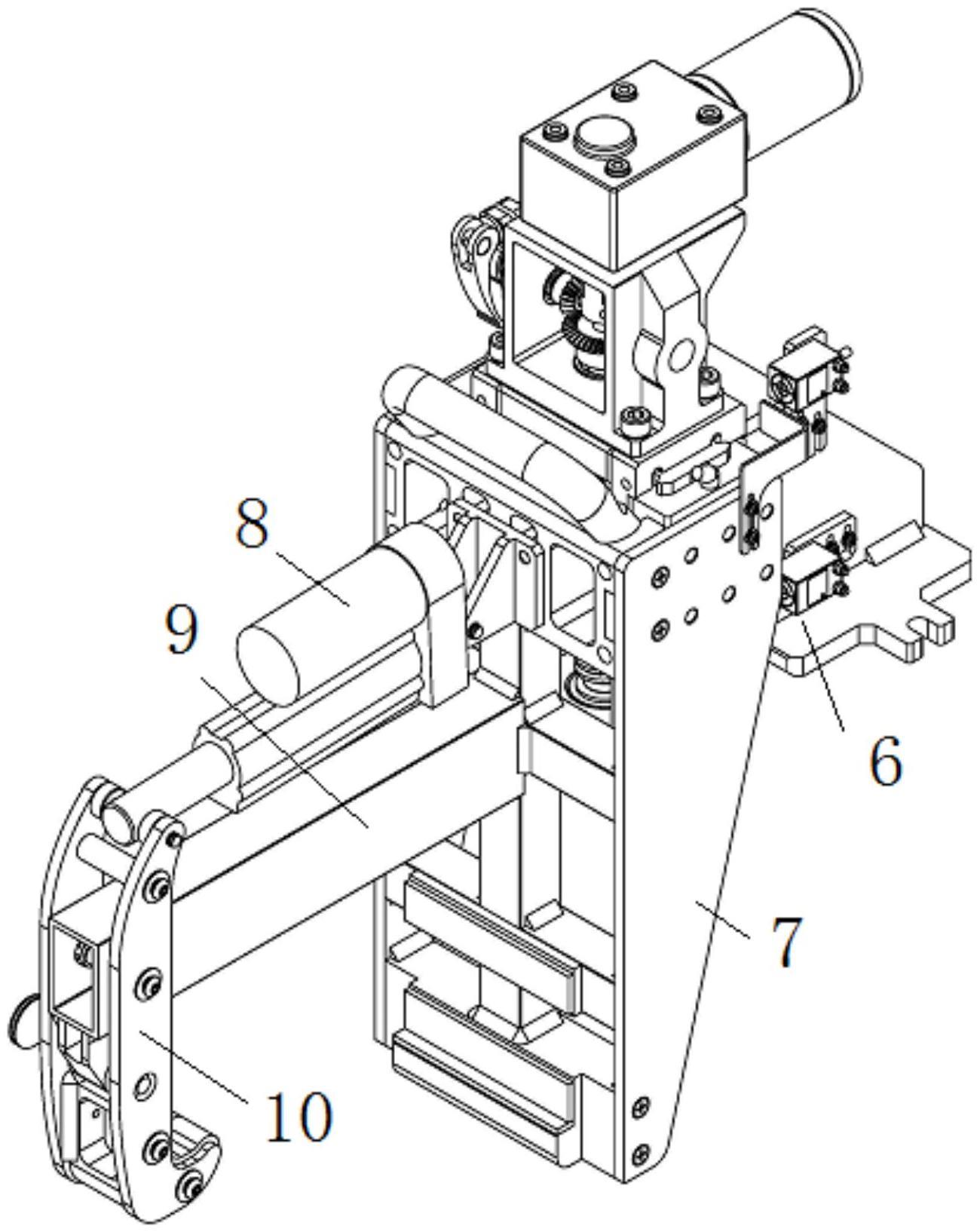
1.一种自运行快速铁路轨道检查仪的抓手机构,包括抓起轨道检查仪纵梁的纵梁抓手和抓起轨道检查仪横梁的横梁抓手,其特征在于,所述纵梁抓手包括纵梁爪部和设在小车上的纵梁安装架(6),所述纵梁安装架(6)上设有带动纵梁爪部升降的纵梁升降机构。
2.根据权利要求1所述的一种自运行快速铁路轨道检查仪的抓手机构,其特征在于,所述纵梁爪部包括位于x-z平面内的纵梁固定部(7),所述纵梁固定部(7)上设有沿y方向分布的纵梁固定杆(9),所述纵梁固定杆(9)转动设有纵梁转动部(10),所述纵梁转动部(10)的转轴沿x方向分布,所述纵梁转动部(10)位于y-z平面,所述纵梁固定杆(9)上设有驱动纵梁转动部(10)旋转的纵梁推动机构,所述纵梁固定部(7)和纵梁转动部(10)之间形成夹持轨道检查仪纵梁的纵梁夹持空间。
3.根据权利要求2所述的一种自运行快速铁路轨道检查仪的抓手机构,其特征在于,所述纵梁推动机构包括沿y方向分布的纵梁电动推杆(8),所述纵梁电动推杆(8)的输出端和纵梁转动部(10)相连接。
4.根据权利要求1-3任一项所述的一种自运行快速铁路轨道检查仪的抓手机构,其特征在于,所述纵梁升降机构为丝杆电机结构或电动推杆结构。
5.根据权利要求1-3任一项所述的一种自运行快速铁路轨道检查仪的抓手机构,其特征在于,所述横梁抓手包括横梁爪部和设在小车上的横梁安装架(5),所述横梁安装架(5)上设有带动横梁爪部升降的横梁升降机构。
6.根据权利要求5所述的一种自运行快速铁路轨道检查仪的抓手机构,其特征在于,所述横梁爪部包括位于x-z平面内的横梁固定部(3),所述横梁固定部(3)沿x方向两端转动设有横梁转动部(1),两个横梁转动部(1)的转轴沿y方向分布,两个横梁转动部(1)位于x-z平面内,两个横梁转动部(1)之间设有带动横梁转动部(1)旋转的横梁推动机构并且形成夹持轨道检查仪横梁的横梁夹持空间。
7.根据权利要求6所述的一种自运行快速铁路轨道检查仪的抓手机构,其特征在于,所述横梁推动机构包括沿y方向分布的横梁电动推杆(4),所述横梁电动推杆(4)滑动设在横梁固定部(3)上,固定端和一个横梁转动部(1)相连接,输出端和另一个横梁转动部(1)相连接,所述横梁固定部(3)上对应每个横梁转动部(1)设有转动连杆(2),所述转动连杆(2)一端和横梁固定部(3)转动连接,另一端和横梁固定部(3)转动连接。
技术总结
本技术公开了一种自运行快速铁路轨道检查仪的抓手机构,涉及轨道检查仪技术领域,解决遇到道岔或小车运动速度较快时,轨道检查仪容易脱离小车的技术问题,包括抓起轨道检查仪纵梁的纵梁抓手和抓起轨道检查仪横梁的横梁抓手,所述纵梁抓手包括纵梁爪部和设在小车上的纵梁安装架,所述纵梁安装架上设有带动纵梁爪部升降的纵梁升降机构;本技术通过横梁抓手和纵梁抓手,能够使得轨道检查仪悬空,方便小车通过道岔或快速运行。
技术研发人员:刘毅,文旭,周后金,李绍云,陈茂松
受保护的技术使用者:什邡瑞邦机械有限责任公司
技术研发日:20221118
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!