障碍物缓慢入侵风险评估方法、设备、存储介质与流程
本申请涉及轨道交通,尤其涉及一种障碍物缓慢入侵风险评估方法、设备、存储介质。
背景技术:
1、从地铁运营角度来看,障碍物的入侵会对行车安全产生很大的影响,部分障碍物入侵事件统计如表1所示。
2、表1障碍物入侵事件统计图
3、
4、从上述铁路障碍物入侵事件可以得出,障碍物的入侵对线路运营产生的最轻微危害是列车晚点,严重的会导致人员伤亡。
5、目前,针对障碍物入侵的现象,研究成果主要集中在对障碍物的检测,如基于图像级激光雷达全天候对铁路隧道口进行监测并识别入侵限界的落石、泥石流等异物所在位置、尺寸和类别,保障铁路车辆安全运行;通过激光雷达对隧道内部扫描,获取有效监控区间内的点云信息,对障碍物物体进行每一帧进行匹配,分析每一帧的差异,最后定位到障碍物及障碍物相对激光雷达的距离,判断是否会影响行车安全等。
6、障碍物的检测主要通过激光雷达和摄像头监测障碍物的位置并判断其是否会入侵限界,此方法监测范围有效,设备成本高,仅能观察到有限距离内的障碍物状态。当观察到障碍物时再采取制动措施,仍有事故发生的可能性,无法起到提前预防的作用,不利于运营的提前规划。
技术实现思路
1、为了解决上述技术缺陷之一,本申请提供了一种障碍物缓慢入侵风险评估方法、设备、存储介质。
2、本申请第一个方面,提供了一种障碍物缓慢入侵风险评估方法,该方法,包括:
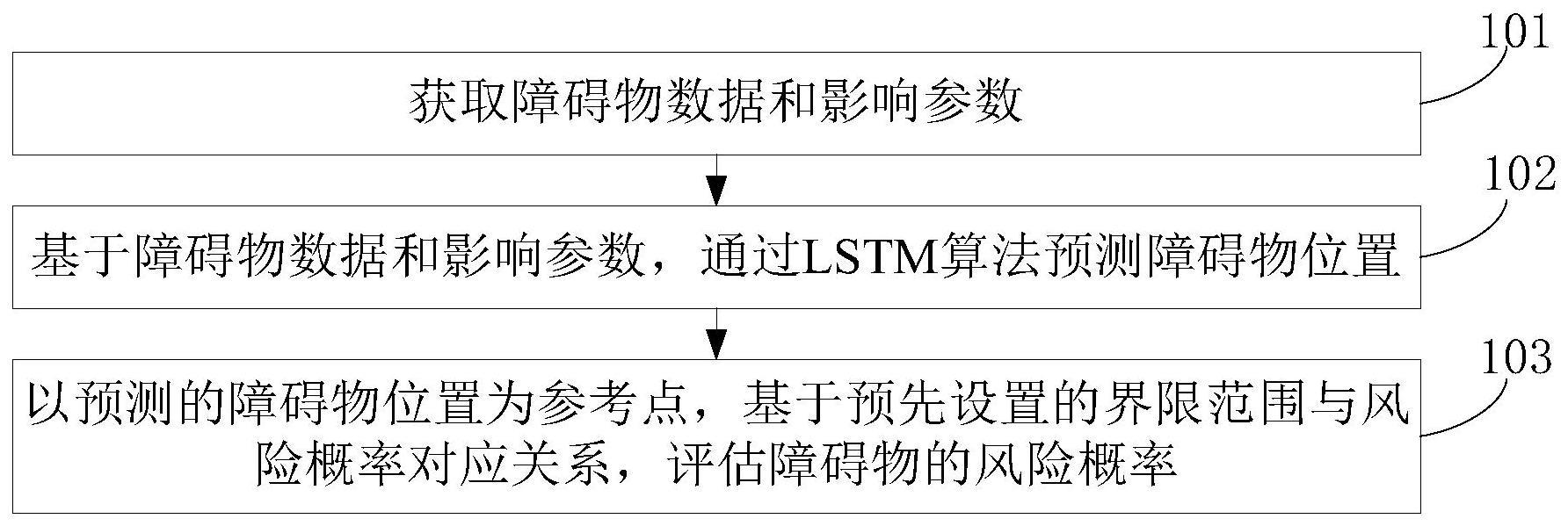
3、获取障碍物数据和影响参数,其中,影响参数包括:列车的振动因素、设备维护周期和风速;
4、基于障碍物数据和影响参数,通过长短期记忆人工神经网络lstm算法预测障碍物位置;
5、以预测的障碍物位置为参考点,基于预先设置的界限范围与风险概率对应关系,评估障碍物的风险概率。
6、可选地,获取影响参数,包括:
7、通过风速传感器获取列车运行时的风速,其中风速传感器放置于列车经过的位置;
8、通过测振传感器获取列车运行时的振动因素;
9、获取用户输入的设备维护周期。
10、可选地,基于障碍物数据和影响参数,通过长短期记忆人工神经网络lstm算法进行障碍物位置的预测,包括:
11、根据障碍物数据,从历史数据中获取同一障碍物的信息,并按照时间顺序排列同一障碍物的信息;
12、将影响参数作为排列的障碍物信息中的一个属性,添加至排列的障碍物信息内;
13、将添加后的排列的障碍物信息,输入预先通过lstm算法训练好的lstm网络模型中,得到障碍物在未来的移动的位置;
14、将障碍物在未来的移动的位置进行逆归一化处理和逆差分转换,得到预测的障碍物位置。
15、可选地,从历史数据中获取同一障碍物的信息之后,还包括:
16、对获取的同一障碍物的信息进行误差消除;
17、对于上下波动的同一障碍物的信息进行平均值修正。
18、可选地,将添加后的排列的障碍物信息,输入预先通过lstm算法训练好的lstm网络模型中,预测障碍物位置之前,还包括:
19、获取训练样本数据;其中,训练样本数据包括多种障碍物类型的位置信息以及影响参数;
20、对训练样本数据进行差分转换;
21、将转换后的训练样本数据转换为监督型数据;
22、对监督型数据进行归一化处理;
23、基于目标损失函数、循环次数和神经元个数,将归一化后的监督型数据作为输入数据,采用lstm算法训练lstm网络模型,得到训练好的lstm网络模型。
24、可选地,得到预测的障碍物位置之后,还包括:
25、基于预测的障碍物位置,形成障碍物的运行轨迹。
26、可选地,影响参数包括:列车的振动因素、设备维护周期和风速。
27、可选地,获取障碍物数据,包括:
28、确定列车运行场景;
29、通过激光雷达获取列车运行环境的点云地图,以及通过长短焦相机获取列车运行图像;
30、基于列车运行场景和列车运行环境数据库,通过预先训练的基于pytorch框架的深度卷积神经网络算法对列车运行图像进行障碍物识别,识别出列车运行图像中的障碍物的类型;其中,列车运行环境数据库包括轨道线信息、列车信息、行人信息、信号机信息、障碍物信息;
31、结合点云地图和列车运行图像,确定障碍物的位置,并进行标定;
32、基于深度学习的轨道区域语义分割算法,提取出列车前向运行环境中的轨道区域,得到限界参数。
33、本申请第二个方面,提供了一种电子设备,包括:
34、存储器;
35、处理器;以及
36、计算机程序;
37、其中,所述计算机程序存储在所述存储器中,并被配置为由所述处理器执行以实现如上述第一个方面所述的方法。
38、本申请第三个方面,提供了一种计算机可读存储介质,其上存储有计算机程序;所述计算机程序被处理器执行以实现如上述第一个方面所述的方法。
39、本申请提供一种障碍物缓慢入侵风险评估方法、设备、存储介质,该方法包括:获取障碍物数据和影响参数,其中,影响参数包括:列车的振动因素、设备维护周期和风速;基于障碍物数据和影响参数,通过lstm算法预测障碍物位置;以预测的障碍物位置为参考点,基于预先设置的界限范围与风险概率对应关系,评估障碍物的风险概率。本申请提供的方法,基于障碍物数据和影响参数,通过lstm算法预测障碍物位置;以预测的障碍物位置为参考点,基于预先设置的界限范围与风险概率对应关系,评估障碍物的风险概率,实现了障碍物的预测,起到提前预防的作用,有利于运营的提前规划。
技术特征:
1.一种障碍物缓慢入侵风险评估方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,获取影响参数,包括:
3.根据权利要求1所述的方法,其特征在于,所述基于所述障碍物数据和影响参数,通过长短期记忆人工神经网络lstm算法进行障碍物位置的预测,包括:
4.根据权利要求3所述的方法,其特征在于,所述从历史数据中获取同一障碍物的信息之后,还包括:
5.根据权利要求3所述的方法,其特征在于,所述将添加后的排列的障碍物信息,输入预先通过lstm算法训练好的lstm网络模型中,预测障碍物位置之前,还包括:
6.根据权利要求3所述的方法,其特征在于,所述得到预测的障碍物位置之后,还包括:
7.根据权利要求1所述的方法,其特征在于,所述障碍物数据包括障碍物的位置、障碍物的类型、界限参数。
8.根据权利要求1所述的方法,其特征在于,获取障碍物数据,包括:
9.一种电子设备,其特征在于,包括:
10.一种计算机可读存储介质,其特征在于,其上存储有计算机程序;所述计算机程序被处理器执行以实现如权利要求1-8任一项所述的方法。
技术总结
本申请提供一种障碍物缓慢入侵风险评估方法、设备、存储介质,该方法包括:获取障碍物数据和影响参数,其中,影响参数包括:列车的振动因素、设备维护周期和风速;基于障碍物数据和影响参数,通过长短期记忆人工神经网络LSTM算法预测障碍物位置;以预测的障碍物位置为参考点,基于预先设置的界限范围与风险概率对应关系,评估障碍物的风险概率。本申请提供的方法,基于障碍物数据和影响参数,通过LSTM算法预测障碍物位置;以预测的障碍物位置为参考点,基于预先设置的界限范围与风险概率对应关系,评估障碍物的风险概率,实现了障碍物的预测,起到提前预防的作用,有利于运营的提前规划。
技术研发人员:郭隆龙,孙博,张蕾,袁彬彬
受保护的技术使用者:交控科技股份有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!