一种面向楼梯运输机器人的自动质心调平载重装置
1.本发明涉及特种机器人,尤其涉及一种楼梯运输过程中平衡楼梯颠簸对物品造成影响的质心调平载重装置。
背景技术:
2.在生产生活中,运输重物通过楼梯,如果不将物品与攀爬车固定,通过楼梯时的颠簸有可能对物品造成损坏。因此需将重物与载重装置固定,防止重物在运输过程中滑落和与载重装置发生碰撞,损坏物品,造成损失。但固定与松懈物品占据了整个运输过程的大部分时间,导致生产效率低下。对物品固定一般采用的捆绑的方式,本身就会损坏一些脆弱物品;此外,搬运无盖容器盛装的液体时,由于通过楼梯的颠簸,会造成液体的倾洒,造成浪费和损失。
3.设计一种运输过程中质心自动调节,不需固定重物的,能平衡颠簸的载重装置对生产生活是十分必要的。
技术实现要素:
4.本发明的目的在于提供一种面向楼梯运输机器人的自动质心调平载重装置,旨在解决现有技术中存在的搬运重物通过楼梯时颠簸对物品造成影响的问题。
5.为实现上述目的,本发明采用的技术方案是:
6.1.一种面向楼梯运输机器人的自动质心调平载重装置,其特征在于:包括底座、载重平台两部分;底座包括承重板和伸缩支杆,底座可焊接或者螺丝固定在车辆上;载重平台包括载物板和调节支架,载物板用以承放重物,调节支架用以调节载物板的相对位置。
7.2.根据权利要求1所述的面向楼梯运输机器人的自动质心调平载重装置,底座的承重板和伸缩支架之间通过铰支座铰接,伸缩支架可通过电动推杆改变推杆伸出前座的长度,从而改变伸缩支架的形状。
8.3.根据权利要求1所述的面向楼梯运输机器人的自动质心调平载重装置,调节支架包括承重横杆和吊臂,载物平台通过调节支架架在伸缩支杆上,载物平台会随着电动推杆的伸缩而升降。吊臂与承重横杆之间铰接,在楼梯攀爬过程中,为使载物板与水平地面始终保持平行,载物板会随着吊臂围绕承重横杆发生相对转动。
9.本发明提供的面向楼梯运输机器人的自动质心调平载重装置的有益效果在于:承重板与伸缩支杆之间的铰接,有利于电动推杆启停使伸缩支杆与承重板之间构成的三角形发生变化,从而使架于伸缩支杆的达到升降的目的。升起的载物平台与伸缩支杆构成了类似秋千的结构,该结构在楼梯运输机器人发生颠簸时,吊臂能围绕承重横杆发生一定程度的转动,平衡颠簸,实现自动的质心调平,使载物板保持与水平地面始终平行的状态。
附图说明
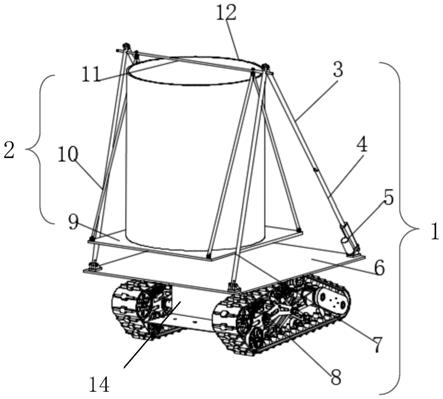
10.图1为面向楼梯运输机器人的自动质心调平装置的总体结构示意图;
11.图2为面向楼梯运输机器人的自动质心调平装置的吊臂连接图;
12.图3为面向楼梯运输机器人的自动质心调平装置的载重平台架接图;
13.图4为面向楼梯运输机器人的自动质心调平装置的吊臂与载物板铰接图;
14.图5为面向楼梯运输机器人的自动质心调平装置的电动推杆与承重板铰接图;
15.图6为面向楼梯运输机器人的自动质心调平装置的拉杆与承重板铰接图;
16.图7为面向楼梯运输机器人的自动质心调平装置启动前状态示意图;
17.图8为面向楼梯运输机器人的自动质心调平装置运动时状态示意图;
18.图9为面向楼梯运输机器人的自动质心调平装置的局部放大示意图。
19.附图标记:
20.3—连接支杆;4—推杆伸出前座;5—电动推杆底座;6—承重板;7—拉杆;8—较支座; 9—载物板;10—吊臂;11—承重横杆;12—桶;21a—带孔螺栓。
具体实施方式
21.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施方式仅仅用以解释本发明,并不用于限定本发明。
22.本发明的面向楼梯运输机器人的自动质心调平装置,其较佳的具体实施方式如图1至图 4所示:
23.如图1所示,本发明的面向楼梯运输机器人的自动质心调平载重装置包括移动平台14,底座1和载重平台2组成。
24.面向楼梯运输机器人的自动质心调平载重装置的移动平台14为可以在建筑物内楼梯自由攀爬的履带车,也可以是其他具有相同功能的移动平台。
25.底座的作用是通过电动推杆5来调整载物平台2的升起与落下,其中连接支杆3和推杆伸出前座3焊接,使两者构成一个整体;承重板6与电动推杆底座5和拉杆7通过铰支座大 8铰接,电动推杆底座5和拉杆7能与承重板6发生相对运动。当推杆伸出前座4伸缩时,拉杆7,承重板6,电动推杆底座5和连接支杆3构成的三角形会产生形变,改变三角形的高,抬起和放下载物平台2。
26.承重横杆架11于伸缩支杆上,承重横杆11与吊臂10通过带孔螺栓21a铰接,吊臂10 与载物板9通过铰支座小铰接。当楼梯运输机器人通过楼梯发生颠簸时,载物平台2被伸缩支杆至于悬空,由于承重横杆11与吊臂10铰接,吊臂10会围绕承重横杆11发生相应转动,使载物板9保持与水平地面的平行;吊臂10与载物板9之间的铰接又能有效的平衡吊臂10 转动过程的晃动,达到自动调节质心并保持平稳的目的。
27.下面对利用所述面向楼梯运输机器人的自动质心调平载重装置进行载水通过楼梯进行说明:
28.载重装置与移动平台14固定,重物置于载物板9中央(如图7中桶14所示),启动电动推杆,推杆伸出前座4伸长,由于采用铰接,拉杆7,承重板6,电动推杆底座5和连接支杆 3所构成的三角形将产生形变,载物板9离开承重板(如图8所示),推杆伸出前座4到达最大伸出长度后电动推杆停止,三角形固定。启动移动平台,通过楼梯时,由于吊臂10与承重杆11铰接,桶12和载物板9将围绕承重横杆11转动一定的角度,自动调节质心位置,保持载物板9
与水平地面始终平行。运输结束,启动电动推杆,推杆伸出前座4缩短到运输前长度,恢复到图7所示状态。
29.以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
技术特征:
1.一种面向楼梯运输机器人的自动质心调平载重装置,其特征在于:包括底座、载重平台两部分;底座包括承重板和伸缩支杆,底座可焊接或者螺丝固定在车辆上;载重平台包括载物板和调节支架,载物板用以承放重物,调节支架用以调节载物板的相对位置。2.根据权利要求1所述的面向楼梯运输机器人的自动质心调平载重装置,底座的承重板和伸缩支架之间通过铰支座铰接,伸缩支架可通过电动推杆改变推杆伸出前座的长度,从而改变伸缩支架的形状。3.根据权利要求1所述的面向楼梯运输机器人的自动质心调平载重装置,调节支架包括承重横杆和吊臂,载物平台通过调节支架架在伸缩支杆上,载物平台会随着电动推杆的伸缩而升降,吊臂与承重横杆之间铰接,在楼梯攀爬过程中,为使载物板与水平地面始终保持平行,载物板会随着吊臂围绕承重横杆发生相对转动。
技术总结
本发明涉及特种机器人,尤其涉及一种楼梯运输过程中平衡楼梯颠簸对物品造成影响的质心调平载重装置。在生产生活中,运输重物通过楼梯,如果不将物品与攀爬车固定,通过楼梯时的颠簸有可能对物品造成损坏。因此需将重物与载重装置固定,防止重物在运输过程中滑落和与载重装置发生碰撞,损坏物品,造成损失。但固定与松懈物品占据了整个运输过程的大部分时间,导致生产效率低下。对物品固定一般采用的捆绑的方式,本身就会损坏一些脆弱物品;此外,搬运无盖容器盛装的液体时,由于通过楼梯的颠簸,会造成液体的倾洒,造成浪费和损失。设计一种运输过程中质心自动调节,不需固定重物的,能平衡颠簸的载重装置对生产生活是十分必要的。平衡颠簸的载重装置对生产生活是十分必要的。平衡颠簸的载重装置对生产生活是十分必要的。
技术研发人员:阚江明 王德鹏 高垚垚
受保护的技术使用者:北京林业大学
技术研发日:2020.10.22
技术公布日:2021/10/18
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1