平行行走系统和包括其的移动平台设备的制作方法
本发明涉及转向系统领域,特别是涉及一种用于同时操控单个车轮相互平行转向的平行行走系统和包括其的移动平台设备。
背景技术:
1、各种各样的便携式移动起重设备、搬运设备和类似的设备在许多不同的行业中都有应用。为了便于迁移,这种设备通常安装在轮子上。然而,它们所承载的负荷可能是沉重而不平衡的。因此,设备的转向能力不仅要求便于操作,其稳定性也是必要条件。虽然我们知道许多用于提升装置、搬运装置等类似装置的转向系统,但它们通常是与两轮驱动车辆相关的转向系统,因此不能提供设备的所有车轮的同时转向。考虑到这种设备经常承担沉重而不平衡的负载,特别是在工业应用上,需要设备所有车轮能同时转动,以提供最佳的稳定性。
2、此外,传统的载具、移动机构等在任意方向平移时的灵活性很小,以最小的旋转半径进行自体旋转时也很困难。例如,在狭窄的停车场中,一辆运载重物的车辆通常只能朝一个方向来回移动,角度偏差很小,而且不能在进入、离开和重新定位时进行必要的急转弯。此外,在尝试进行这样的操控时,车辆所载的货物会发生惯性移位,常常达到整个车辆可能失去平衡的程度。因此,需要有一个平行行走系统来解决上述问题。
技术实现思路
1、本发明要解决的技术问题是提供一种平行行走系统,使其用于便携设备、便携载具平台等的转向系统,可以平行和同时的方式操控各个车轮,实现各个车轮的同步、瞬时、平行地转动方向。
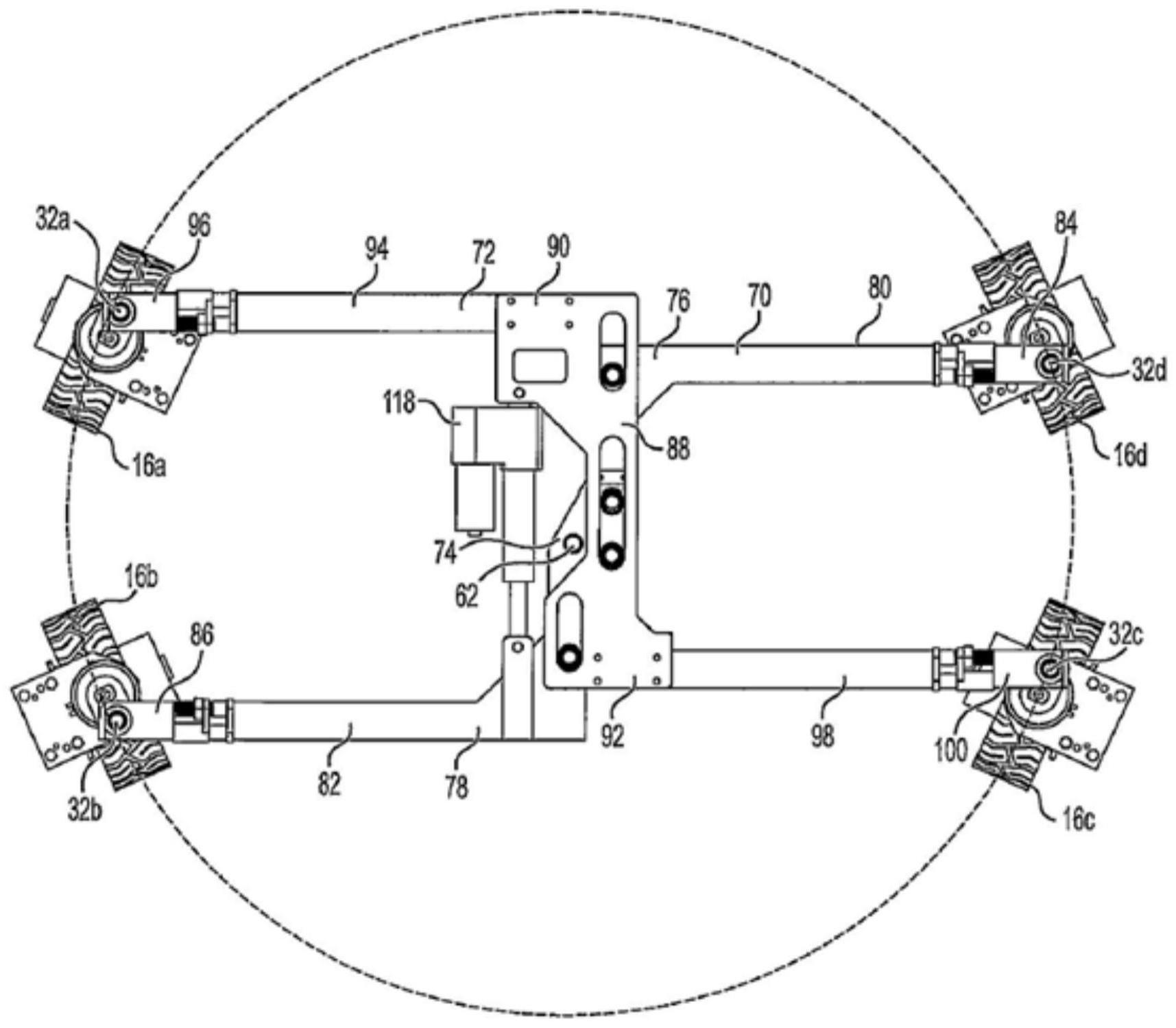
2、为解决上述技术问题,本发明提供一种平行行走系统,其适用于便携设备、便携载具平台等的转向系统,可平行、同时地操控各个车轮。所述平行行走系统包括第一铰接连杆总成和第二铰接连杆总成。第一铰接连杆总成有一个第一中心横杆、第一纵向连杆和第二纵向连杆,其中第一纵向连杆固定在第一中心横杆的第一端并从此处纵向延伸,第二纵向连杆固定在第一中心横杆的第二端并从此处纵向延伸。同理,第二铰接连杆总成有一个第二中心横杆、第三纵向连杆和第四纵向连杆,第三纵向连杆固定在第二中心横杆的第一端并从此处纵向延伸,第四纵向连杆固定在第二中心横杆的第二端并从此处纵向延伸。第二中心横杆可相对滑动地安装在第一铰接连杆总成的第一中心横杆上。所述第一纵向连杆和所述第二纵向连杆可以从所述第一中心横杆反向平行延长,同样,所述第三纵向连杆和所述第四纵向连杆也可以从所述第二中心横杆反向平行延长。第一,第二,第三和第四纵向连杆的长度可以调节。
3、一个偏心转向曲柄销铰接到所述第一铰接连杆总成的第一中心横杆上,同时旋转驱动第一铰接连杆总成和第二铰接连杆总成。该系统还包含第一、第二、第三和第四车轮系总成。第一、第二、第三和第四轮系总成分别包括一个转向轭,一个安置在转向轭上并可沿转向轭回转的滚动轮,一个安装在转向轭上的电动滑环,一个安置在电动滑环轴向上的主销,和一个具有相对第一端和第二端的偏心曲柄臂,所述第一端固定在主销的上端,所述第二端用于安装滚轮曲柄销。第一纵向连杆的自由端铰接在第一轮系总成的滚轮曲柄销上,第二纵向连杆的自由端铰接在第二轮系总成的滚轮曲柄销上,第三纵向连杆的自由端铰接在第三轮系总成的滚轮曲柄销上,第四纵向连杆的自由端铰接在第四轮系总成的滚轮曲柄销上。第一、第二、第三和第四轮系总成分别还可以包括设置在电动滑环上端和偏心曲柄臂之间的随动旋转盘。每个轮系可以是任何合适类型的轮子,包括但不限于,一个自驱电动轮,一个自动转向和/或自动驱动的麦克纳姆轮或类似的轮子。
4、第一和第二铰接连杆总成安置在一个中空的底盘内,第一、第二、第三和第四轮系总成安装在中空的底盘上,使得各自的轮子安装在中空底盘的外部,其各自的偏心曲柄臂安装在中空底盘的内部。至少采用一个线性动力单元可选择性驱动第一铰接连杆总成的第一中心横杆相对于第二铰接连杆总成的第二中心横杆做滑动运动。
5、此外,第一、第二、第三和第四转向制动器可以安装在中空底盘内,分别选择性地对第一、第二、第三和第四轮系总成的角度转向运动施加制动。
6、在一实施例中,偏心转向曲柄是一转向曲柄销,所述平行行走系统进一步包括一个旋转驱动装置,一个第一驱动齿轮与所述旋转驱动装置连接,第二传动齿轮与第一驱动齿轮啮合,第三传动齿轮与第二传动齿轮啮合。转向曲柄销偏心地安装在第三传动齿轮上。在本实施例中,离合器可用于选择性地移动第二传动齿轮与第一驱动齿轮和第三传动齿轮脱离,从而在执行离合器时停止转向曲柄销的旋转。
7、在另一实施例中,偏心转向曲柄由转向驱动器驱动,该转向驱动器将转向齿轮的旋转运动传递给偏心转向曲柄。作为另一种选择,可以将中空平台安装在至少两个所述平行行走系统上形成移动平台设备,其中所述中空底盘安装在中空平台外部,所述转向齿轮安装在中空平台内部。在本实施例中,一个环形链条可以旋转地连接所述至少两个平行行走系统的转向齿轮以驱动其同时转向。可在中空平台内安装链条收紧器,以选择性地调节环形链条的松紧度。所述至少两个平行行走系统的其中一个转向齿轮可以直接由方向盘或类似装置驱动。
8、在进一步实施例中,至少二个平行行走系统可以安装到具有至少一个环形环道的平台上。所述的至少二个平行行走系统以相互固定的角度位置铰接滑行在这个环形环道上。例如,可以提供同心的内外环形轨道。在本实施例中,每个平行行走系统都具有彼此独立转向系统,但它们以固定的方式与平台连接。每个平行行走系统可以各自携带一个远程遥控控制的转向驱动总成、电机或类似的装置,它们同时操作,以驱动每个平行行走系统同步、瞬时、平行地转动方向。每个转向驱动总成可连接一个角度传感器,用来监测和控制相应偏心转向曲柄的旋转角度。因此,每个被连接的平行行走系统都可以监控本身的旋转角度,并做出任何必要的误差修正,以使自己相对于由平台连接的其他平行行走系统定位准确。应当说明的是,可以使用任何合适类型的遥控器,遥控器也可以用机载可编程控制器代替,或与机载可编程控制器一起使用。
9、该发明的以上描述及其他特点将结合附图进行详细说明。
技术特征:
1.一种平行行走系统,其特征在于,包括:
2.根据权利要求1所述的平行行走系统,其特征在于,其中第一纵向连杆和第二纵向连杆从第一中心横杆向相反的平行方向延伸。
3.根据权利要求2所述的平行行走系统,其特征在于,其中第三纵向连杆和第四纵向连杆从第二中心横杆向相反的平行方向延伸。
4.根据权利要求1所述的平行行走系统,其特征在于,其中所述第一、第二、第三和第四轮系总成还包括设置在电动滑环上端和偏心曲柄臂之间的旋转盘。
5.根据权利要求1所述的平行行走系统,其特征在于,还包括安装在中空底盘内的第一、第二、第三和第四转向制动器,分别用于选择性地对第一、第二、第三和第四轮系总成的角转向运动施加制动力。
6.根据权利要求1所述的平行行走系统,其特征在于,所述转向驱动总成包括:
7.根据权利要求6所述的平行行走系统,其特征在于,还包括一个与中间齿轮连接的离合器,用于选择性地从驱动齿轮和从动齿轮中分离出中间齿轮。
8.根据权利要求1所述的平行行走系统,其特征在于,每个第一、第二、第三和第四纵向连杆还包括一个长度调节器,用于以适应底盘位置的各纵向连杆的长度调节。
9.根据权利要求1所述的平行行走系统,其特征在于,所述转向驱动总成包括一个转向驱动器和一个啮合于转向驱动器的齿轮系,转向曲柄销被偏心地安装在齿轮系上。
10.根据权利要求1所述的平行行走系统,其特征在于,所述第一、第二、第三和第四轮系总成中的每个滚动轮包括一个麦克纳姆轮。
11.根据权利要求1所述的平行行走系统,其特征在于,每个轮系总成的滚动轮分布在一个环形轨道上,从而当所述至少一个线性动力单元在伸出位置时,实现零半径自体回转。
12.一种移动平台设备,其特征在于,包括:
13.根据权利要求12所述的移动平台设备,其特征在于,还包括一个将所述至少两个平行行走系统的转向齿轮连接起来的闭合旋转机构。
14.根据权利要求13所述的移动平台设备,其特征在于,还包括一个收紧器,用于选择性地调整闭合旋转机构的松紧度。
15.根据权利要求13所述的移动平台设备,其特征在于,还包括一个方向盘,用于直接驱动所述至少两个平行行走系统的一个转向齿轮的旋转。
16.一种移动平台设备,其特征在于,包括:
17.根据权利要求16所述的移动平台设备,其特征在于,还包括一个角度传感器,与每个平行行走系统的转向驱动总成相连,用于监测和控制转向曲柄销的角度转向。
18.根据权利要求16所述的移动平台设备,其特征在于,至少一个环形轨道包括内环形轨道和外环形轨道,内环形轨道和外环形轨道彼此同心设置。
技术总结
本发明公开了一种平行行走系统和包括其的移动平台设备,属于一种用于便携式设备、便携式平台等的转向系统,允许每个轮系以相互平行和同步的方式进行操控。所述平行行走系统包括一个第一铰接连杆总成和一个第二铰接连杆总成,两者可相对滑动,并且每个连杆总成都包括一对纵向连杆,用于与相应的一对轮系总成偏心铰接。第一和第二铰接连杆总成安装在一个中空底盘内,轮系总成安装在中空底盘上,其各自的滚动轮安装在中空底盘外部,其各自的偏心曲柄臂安装在中空底盘内。还包括至少一个线性动力单元,用于选择性地驱动第一铰接连杆总成相对于第二铰接连杆总成的滑动运动。该平行行走系统可实现各个车轮的同步、瞬时、平行地转动。
技术研发人员:崔侃,玛格丽特·崔·刘,赛米欧·侃·刘
受保护的技术使用者:崔侃
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!