测量车辆的转向角偏差量的方法及系统与流程
本发明涉及一种测量车辆的转向角(steering angle)偏差量的方法及系统。
背景技术:
1、以现有的技术来说,在大约100米的距离以及固定的速度范围内,可在车辆直行时于稳定的点准确地测量车辆的转向角的偏差量。然而,这需要驾驶员的技巧和较大的行驶面积,并且需要针对不同车辆类型来设定转向齿轮比以及轴距以进行校正。
技术实现思路
1、本发明是针对一种测量车辆的转向角偏差量的方法及系统,可在低速度、短时间、无需针对车辆类型来设定的情况下,计算出车辆直行时的转向角。
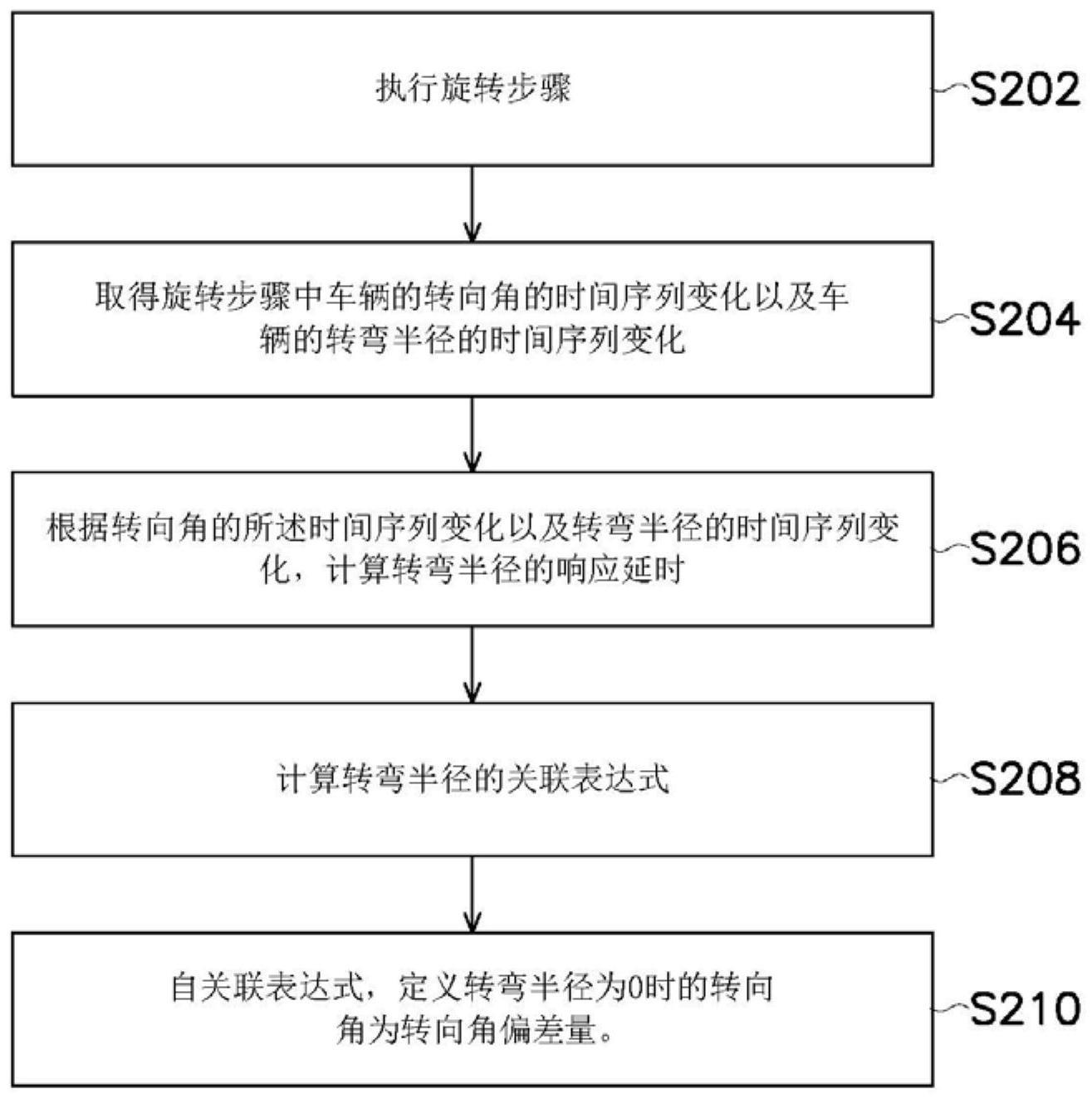
2、本发明的测量车辆的转向角偏差量的方法包括以下步骤。首先,执行旋转步骤,其中旋转步骤为:当车辆行驶时,使转向盘持续地在相对于中心的左侧位置与相对于中心的右侧位置之间左右旋转。接着,取得旋转步骤中车辆的转向角的时间序列变化以及车辆的转弯半径的时间序列变化,以计算转弯半径的响应延时。之后,计算转弯半径的关联表达式,其中关联表达式校正在多个时间点转向角所对应的响应延时。自关联表达式,定义转弯半径为0时的转向角为转向角偏差量。
3、本发明的测量车辆的转向角偏差量的系统包括惯性传感器、转向角传感器以及处理装置。惯性传感器用以测量所述车辆的加速度以及角速度。转向角传感器用以测量车辆的转向角。当车辆执行旋转步骤时,处理装置用以自惯性传感器取得车辆的加速度以及角速度,并且自转向角传感器取得车辆的转向角,进而取得旋转步骤中车辆的转向角的时间序列变化以及车辆的转弯半径的时间序列变化,以计算转弯半径的响应延时,其中旋转步骤为:当车辆行驶时,使转向盘持续地在相对于中心的左侧位置与相对于中心的右侧位置之间左右旋转。处理装置还用以计算转弯半径的关联表达式,并且自关联表达式,定义转弯半径为0时的转向角为转向角偏差量,其中关联表达式校正在多个时间点转向角所对应的响应延时。
4、在根据本发明的实施例中,在旋转步骤中,转向盘是沿着行驶路径上的蜿蜒导引持续地左右旋转。
技术特征:
1.一种测量车辆的转向角偏差量的方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,在所述旋转步骤中,所述转向盘是沿着行驶路径上的蜿蜒导引持续地左右旋转。
3.一种测量车辆的转向角偏差量的系统,其特征在于,包括:
4.根据权利要求3所述的系统,其特征在于,在所述旋转步骤中,所述转向盘是沿着行驶路径上的蜿蜒导引持续地左右旋转。
技术总结
本发明提供一种测量车辆的转向角偏差量的方法及系统。前述方法包括以下步骤。首先,执行旋转步骤,其中旋转步骤为:当车辆行驶时,使转向盘持续地在相对于中心的左侧位置与相对于中心的右侧位置之间左右旋转。取得旋转步骤中车辆的转向角的时间序列变化以及车辆的转弯半径的时间序列变化,以计算转弯半径的响应延时。之后,计算转弯半径的关联表达式,其中关联表达式校正在多个时间点转向角所对应的响应延时。自关联表达式,定义转弯半径为0时的转向角为转向角偏差量。本发明所提出的测量车辆的转向角偏差量的方法及系统,可在低速度、短时间、无需针对车辆类型来设定的情况下,计算出车辆直行时的转向角。
技术研发人员:仓井贤一郎
受保护的技术使用者:本田技研工业株式会社
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!