移动载台及其稳定方法与流程
本发明涉及一种移动载台,尤其涉及一种移动载台及其运动稳定方法。
背景技术:
1、近年来移动载台的需求持续增加,各式的移动载台,例如自动导引车(autonomousguided vehicle,agv)或自主移动机器人(autonomous mobile robot,amr)等,逐渐普及于一般大众的生活周遭。
2、为了避免在移动时因为重心超出底盘的支撑范围外而倾倒,制造商经常会对移动载台的底盘进行加重,并且对底盘均衡配重。藉此,令移动载台整体的重心尽可能地落在车体的中心位置。
3、然而,上述做法容易使得移动载台整体变得很笨重。并且,当移动载台上放置的负载增加而导致重心位置变高时,移动载台在急促起步或是煞车时容易造成负载的震动。如此一来,移动载台本身也会因为无法确保负载的晃动状况而倾倒。
4、是以,本技术领域实需一种能够动态调整移动载台的重心位置,以避免移动载台倾倒的有效机制。
技术实现思路
1、本发明的主要目的,在于提供一种移动载台及其稳定方法,系可监控移动载台运作时的惯性及重心变化,并且动态对重心位置进行补偿。
2、于本发明的第一实施例中,所述移动载台包括:
3、一车体,具有一底盘,该底盘设置有一移动机构;
4、一平面压力传感器,设置于该车体上,感测该车体的一压力分布状况以获得该车体的一重心位置;
5、一可动式工具,设置于该车体上;及
6、一控制器,连接该移动机构、平面压力传感器及该可动式工具,该控制器被配置为在该重心位置离开该车体的一稳定区时,控制该移动机构或该可动式工具进行一重心补偿运动,其中该重心补偿运动针对该重心位置相对于该稳定区的一重心偏移方向提供一反向作用力,而使该重心位置返回该稳定区。
7、于本发明的第二实施例中,所述稳定方法可应用于如上的移动载台,并且包括下列步骤:
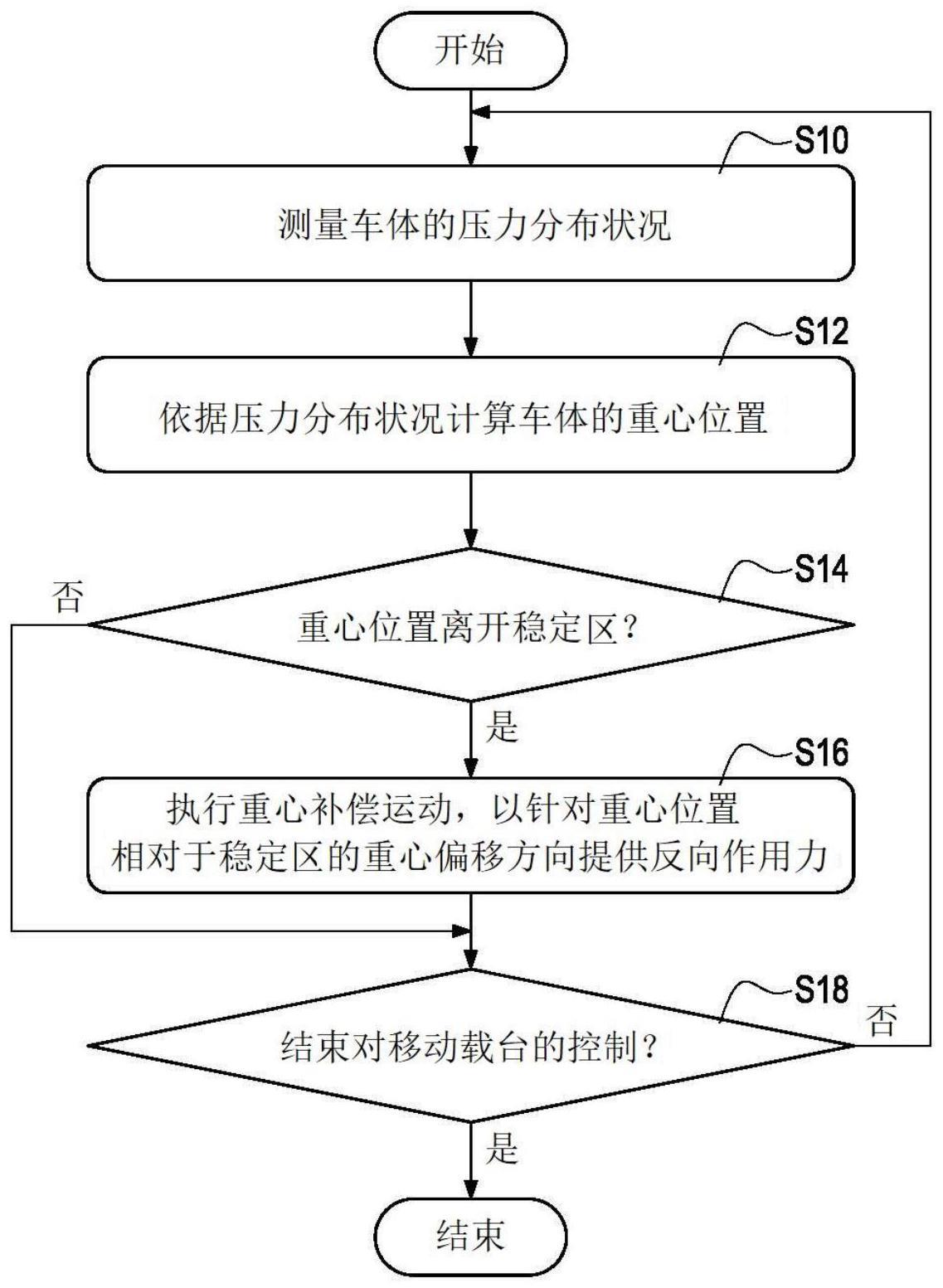
8、a)通过该平面压力传感器感测该车体的一压力分布状况;
9、b)依据该压力分布状况计算该车体的一重心位置;及
10、c)于判断该重心位置离开靠近该车体的中心位置的一稳定区时执行一重心补偿运动,其中该重心补偿运动针对该重心位置相对于该稳定区的一重心偏移方向提供一反向作用力。
11、于本发明的第三实施例中,所述稳定方法可应用于如上的移动载台,并且包括下列步骤:
12、a)通过该平面压力传感器感测该车体的一压力分布状况;
13、b)依据该压力分布状况计算该车体的一重心位置;
14、c)判断该重心位置落在该车体的一稳定区或一补偿区,其中该稳定区靠近该车体的中心位置,该补偿区靠近该车体的周缘位置;及
15、d)于判断该重心位置落在该补偿区时,控制该可动式工具进行一姿态调整程序,其中该姿态调整程序调整该可动式工具的一位置及一姿态,以令该可动式工具的一工具重心朝向该重心位置相对于该稳定区的一重心偏移方向的一反方向移动。
16、本发明通过对移动载台的监控与控制,可以动态补偿重心位置,使得车身不容易翻覆。藉此,制造商不需要加重移动载台的底盘,而使得移动载台可以适用于轻量化的设计。并且,通过动态调整重心位置的方式,亦可防止因为移动载台上的负载增加、重心变高或负载晃动时,可能导致移动载台倾倒的意外发生。
技术特征:
1.一种移动载台,包括:
2.根据权利要求1所述的移动载台,其中所述重心补偿运动是控制所述移动机构朝向所述重心偏移方向移动。
3.根据权利要求2所述的移动载台,其中所述控制器被配置为在所述重心偏移方向与所述移动载台的预定路线方向不一致时,控制所述移动机构先朝向所述重心偏移方向移动以提供所述反向作用力,并且于所述重心位置返回所述稳定区后再控制所述移动机构朝向所述预定路线方向前进。
4.根据权利要求1所述的移动载台,其中所述重心补偿运动是控制所述可动式工具进行姿态调整程序,所述姿态调整程序调整所述可动式工具的位置及姿态,以令所述可动式工具的工具重心朝向所述重心偏移方向的反方向移动。
5.根据权利要求4所述的移动载台,其中所述可动式工具进行所述姿态调整程序时,是先抓取所述车体上的负载,再进行所述位置及所述姿态的调整。
6.根据权利要求4所述的移动载台,其中所述车体于一侧上具有负载区,所述负载区放置负载,其中所述重心补偿运动是控制所述可动式工具朝向所述重心偏移方向的反方向移动所述负载。
7.根据权利要求6所述的移动载台,其中所述重心补偿运动是由所述可动式工具抓取至少一所述负载并使得所述至少一负载的放置位置落在所述稳定区中,其中,所述控制器被配置为在判断所述重心位置返回稳定区后,控制所述可动式工具停止调整其他负载的所述放置位置。
8.根据权利要求7所述的移动载台,其中所述控制器被配置为判断所述重心位置于所述稳定区外的补偿区中的落点位置,并且依据所述落点位置决定是否在控制所述移动机构于预定路线上进行移动的同时,控制所述可动式工具调整所述负载的所述放置位置。
9.一种移动载台的稳定方法,应用于移动载台,其中所述移动载台具有车体,所述车体上具有平面压力传感器,并且所述方法包括:
10.根据权利要求9所述的稳定方法,其中所述车体具有底盘,所述底盘设置有移动机构,其中所述步骤c)包括控制所述移动机构朝向所述重心偏移方向移动。
11.根据权利要求9所述的稳定方法,其中所述车体上设置有可动式工具,其中所述步骤c)包括控制所述可动式工具进行姿态调整程序,所述姿态调整程序调整所述可动式工具的位置及姿态,以令所述可动式工具的工具重心朝向所述重心偏移方向的反方向移动。
12.根据权利要求11所述的稳定方法,其中所述车体于一侧上具有负载区,所述负载区放置负载,其中所述步骤c)包括控制所述可动式工具朝向所述重心偏移方向的反方向移动所述负载。
13.根据权利要求9所述的稳定方法,其中还包括步骤d):于判断所述重心位置落在所述稳定区时,控制所述车体上的可动式工具执行震动抑制控制程序。
14.一种移动载台的稳定方法,应用于移动载台,其中所述移动载台具有车体,所述车体上具有平面压力传感器及可动式工具,并且所述方法包括:
技术总结
本发明提供一种移动载台及其稳定方法,移动载台的稳定方法应用于具有车体、平面压力传感器及移动机构的移动载台,并且包括下列步骤:通过平面压力传感器感测车体的压力分布状况;依据压力分布状况计算车体的重心位置;判断重心位置是否离开车体上预定义的稳定区内;及,于重心位置离开稳定区时,由移动载台朝向重心偏移方向提供反向作用力,以使重心位置返回稳定区内。
技术研发人员:黄正豪,黄柏乔,林汉卿,王锡裕
受保护的技术使用者:台达电子工业股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!