车辆辅助驾驶方法、装置、设备及介质与流程
本公开涉及车辆驾驶领域,特别涉及一种车辆辅助驾驶方法、装置、设备及介质。
背景技术:
1、智能车辆是一个集环境感知、规划决策、多等级辅助驾驶等功能于一体的综合系统,它集中运用了计算机、现代传感、信息融合、通讯、人工智能及自动控制等技术,是典型的高新技术综合体。
2、在无人驾驶汽车领域或辅助驾驶领域中,需要确定当前的航向角,并根据该航向角控制车辆的行驶方向。然而,目前由于自动驾驶领域技术并不成熟,无法运用在全部驾驶领域,同时部分驾驶人员对自动驾驶的信任不及对自身驾驶技术的信任,不愿意使用自动驾驶,从而导致当前自动驾驶的使用率并不高。
3、在人工驾驶时,如图1所示,当驾驶员期望直线行驶时,会将方向盘角度置为0。但是因为路面倾斜、横风、车轮不平衡等原因的干扰,驾驶员需要不断微调方向盘,才能保证直线行驶,这样一来,不仅增加了驾驶的负担,同时也增添了驾驶的不稳定性,因此,亟需一种技术对人工驾驶进行辅助,减少驾驶人员的负担。
技术实现思路
1、本发明提供一种车辆辅助驾驶方法、装置、设备和介质,用以解决相关技术中由于路面倾斜、横风和车轮不平衡等原因导致增加驾驶负担与不稳定性的问题。
2、第一方面,本发明实施例提供一种车辆辅助驾驶方法,该方法包括:
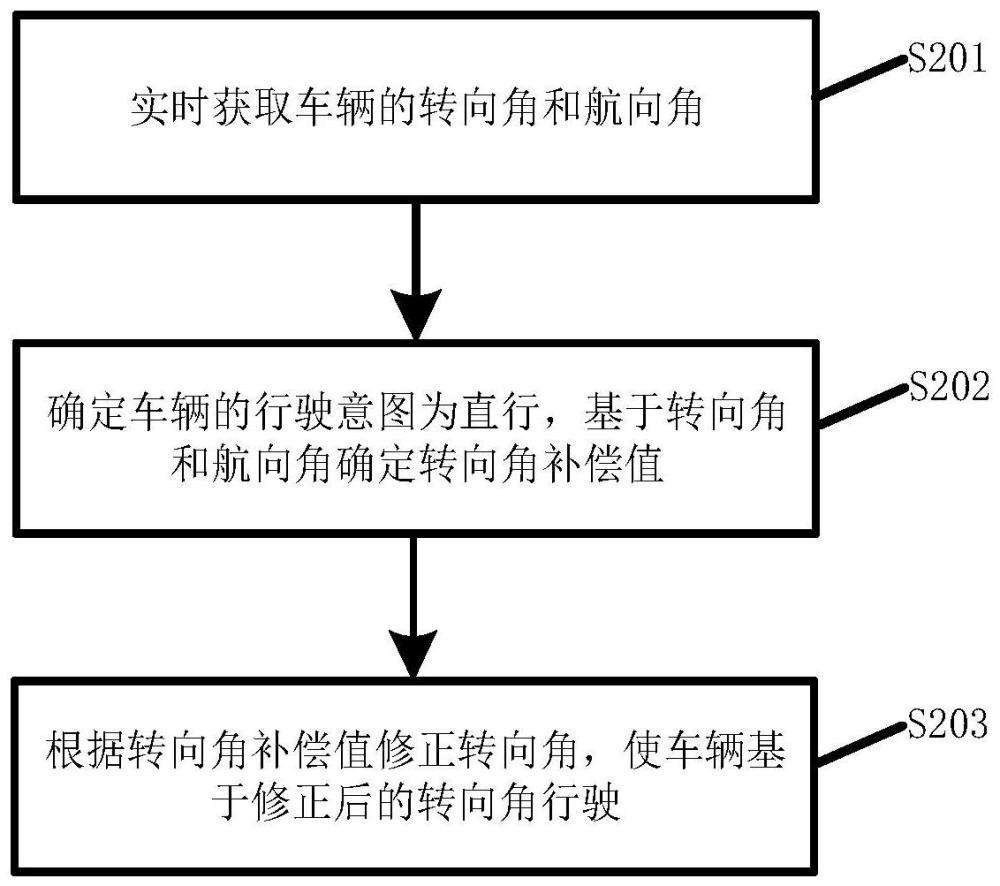
3、实时获取车辆的转向角和航向角;
4、确定车辆的行驶意图为直行时,基于转向角和航向角确定转向角补偿值;
5、根据转向角补偿值修正转向角,使车辆基于修正后的转向角行驶。
6、在一种可能的实施方式中,本发明实施例提供的方法中,实时获取车辆驾驶的转向角和航向角,包括:
7、实时获取航向角和方向盘转角;
8、根据方向盘转角确定转向角。
9、在一种可能的实施方式中,本发明实施例提供的方法中,确定车辆的行驶意图为直行时,基于转向角和航向角确定转向角补偿值之前,还包括:
10、当转向角为0时,确定车辆的行驶意图为直行。
11、在一种可能的实施方式中,本发明实施例提供的方法中,当转向角为0时,确定车辆的行驶意图为直行,包括:
12、当方向盘转角在预设时长内持续小于预设方向盘阈值时,确定车辆的行驶意图为直行。
13、在一种可能的实施方式中,本发明实施例提供的方法中,当方向盘转角在预设时长内持续小于方向盘阈值时,确定车辆的行驶意图为直行之前,方法还包括:
14、获取车辆的车速;
15、基于车速确定方向盘阈值。
16、在一种可能的实施方式中,本发明实施例提供的方法中,使车辆基于修正后的转向角行驶之后,方法还包括:
17、判断车辆的行驶方向与道路的延伸方向是否平行的;
18、在车辆的行驶方向与道路的延伸方向不平行时,进一步修正转向角补偿值。
19、在一种可能的实施方式中,本发明实施例提供的方法中,基于转向角和航向角确定转向角补偿值,包括:
20、根据转向角与航向角的差值确定转向角补偿值;
21、修正转向角补偿值,修正后的转向角补偿值小于预设阈值。
22、第二方面,本发明实施例提供一种车辆辅助驾驶装置,包括:
23、获取单元,用于实时获取车辆的转向角和航向角;
24、确定单元,用于确定车辆的行驶意图为直行时,基于转向角和航向角确定转向角补偿值;
25、修正单元,用于根据转向角补偿值修正转向角,使车辆基于修正后的转向角行驶。
26、在一种可能的实施方式中,本发明实施例提供的装置中,获取单元具体用于:
27、实时获取航向角和方向盘转角;
28、根据方向盘转角确定转向角。
29、在一种可能的实施方式中,本发明实施例提供的装置中,确定单元具体用于:
30、当转向角为0时,确定车辆的行驶意图为直行。
31、在一种可能的实施方式中,本发明实施例提供的装置中,确定单元具体用于:
32、当方向盘转角在预设时长内持续小于预设方向盘阈值时,确定车辆的行驶意图为直行。
33、在一种可能的实施方式中,本发明实施例提供的装置中,确定单元还用于:
34、获取车辆的车速;
35、基于车速确定方向盘阈值。
36、在一种可能的实施方式中,本发明实施例提供的装置中,修正单元还用于:
37、判断车辆的行驶方向与道路的延伸方向是否平行的;
38、在车辆的行驶方向与道路的延伸方向不平行时,进一步修正转向角补偿值。
39、在一种可能的实施方式中,本发明实施例提供的装置中,确定单元具体用于:
40、根据转向角与航向角的差值确定转向角补偿值;
41、修正转向角补偿值,修正后的转向角补偿值小于预设阈值。
42、第三方面,本发明实施例提供了一种电子设备,包括:至少一个处理器、至少一个存储器以及存储在存储器中的计算机程序指令,当计算机程序指令被处理器执行时实现本发明实施例第一方面提供的方法。
43、第四方面,本发明实施例提供了一种计算机可读存储介质,其上存储有计算机程序指令,当计算机程序指令被处理器执行时实现本发明实施例第一方面提供的方法。
44、本发明实施例提供的车辆辅助驾驶方法,首先实时获取车辆的转向角和航向角,当确定车辆的行驶意图为直行时,基于转向角和航向角确定转向角补偿值,最后根据转向角补偿值修正转向角,以使车辆以直行的方向行驶。与相关技术相比,解决了由于路面倾斜、横风和车轮不平衡等原因导致的问题,减少了驾驶人员的负担,提升了驾驶稳定性。
技术特征:
1.一种车辆辅助驾驶方法,其特征在于,包括:
2.如权利要求1所述的方法,其特征在于,所述实时获取车辆的转向角和航向角,包括:
3.如权利要求2所述的方法,其特征在于,所述确定所述车辆的行驶意图为直行时,基于所述转向角和所述航向角确定转向角补偿值之前,所述方法还包括:
4.如权利要求3所述的方法,其特征在于,所述当所述转向角为0时,确定所述车辆的行驶意图为直行,包括
5.如权利要求4所述的方法,其特征在于,所述当所述方向盘转角在预设时长内持续小于方向盘阈值时,确定所述车辆的行驶意图为直行之前,所述方法还包括:
6.如权利要求3或5所述的方法,其特征在于,所述使所述车辆基于修正后的转向角行驶之后,所述方法还包括:
7.如权利要求1所述的方法,其特征在于,所述基于所述转向角和所述航向角确定转向角补偿值,包括:
8.一种车辆辅助驾驶装置,其特征在于,包括:
9.一种电子设备,其特征在于,包括:至少一个处理器、至少一个存储器以及存储在所述存储器中的计算机程序指令,当所述计算机程序指令被所述处理器执行时实现如权利要求1-7中任一项所述的方法。
10.一种计算机可读存储介质,其上存储有计算机程序指令,其特征在于,当所述计算机程序指令被处理器执行时实现如权利要求1-7中任一项所述的方法。
技术总结
本公开提供一种车辆辅助驾驶方法、装置、设备和介质,用以解决相关技术中由于路面倾斜、横风和车轮不平衡等原因导致增加驾驶负担与不稳定性的问题,所述方法包括:实时获取车辆的转向角和航向角;确定所述车辆的行驶意图为直行时,基于所述转向角和所述航向角确定转向角补偿值;根据所述转向角补偿值修正所述转向角,使所述车辆基于修正后的转向角行驶。
技术研发人员:蒙越,宁昀鹏
受保护的技术使用者:北京罗克维尔斯科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!