搬运推车和搬运推车的控制方法与流程
本发明涉及装载行李或商品等的平板车或搬运推车(以下简称搬运推车)及控制其动作的技术。
背景技术:
1、现在,在超市、工厂、大楼等设施中,为了搬运行李、商品等物品(货物),正在使用搬运推车。在搬运推车中,有时具有自主行驶模式和手动行驶模式。这里,专利文献1中公开了虽然不是搬运推车但具有自主行驶模式和手动行驶模式的车辆的技术。
2、在专利文献1中,将“自主行驶的应用及解除”作为技术问题。为了解决这个问题,专利文献1中为了进行“自主行驶模式和手动驾驶模式之间的切换”,车辆的计算机110可以执行一系列对环境、系统和驾驶员的检查以识别特定状态。该计算机可修正这些状态中的若干个状态,并向驾驶员提供待完成的任务810至850、910至940的检查列表。一旦任务完成并且状态改变,计算机110就可以允许驾驶员从手动驾驶模式切换到自主行驶模式。此外,记载了“计算机110可以判定从自主行驶模式切换到手动驾驶模式在特定状态下对驾驶员的安全和舒适是有害的”。
3、现有技术文献
4、专利文献
5、专利文献1:日本专利特开2016-212905号公报
技术实现思路
1、发明所要解决的技术问题
2、在专利文献1中,在接收到从手动驾驶模式切换到自主驾驶模式的请求时,以行驶状态为条件执行切换。由此,专利文献1中,虽然根据切换请求或行驶状态进行切换,但要花工夫去请求,且行驶状态(任务)的判断处理会产生负载。
3、因此,在本发明中,将活用该运用特性以更有效率地进行与搬运推车的行驶模式切换有关的控制作为技术问题。
4、用于解决技术问题的技术手段
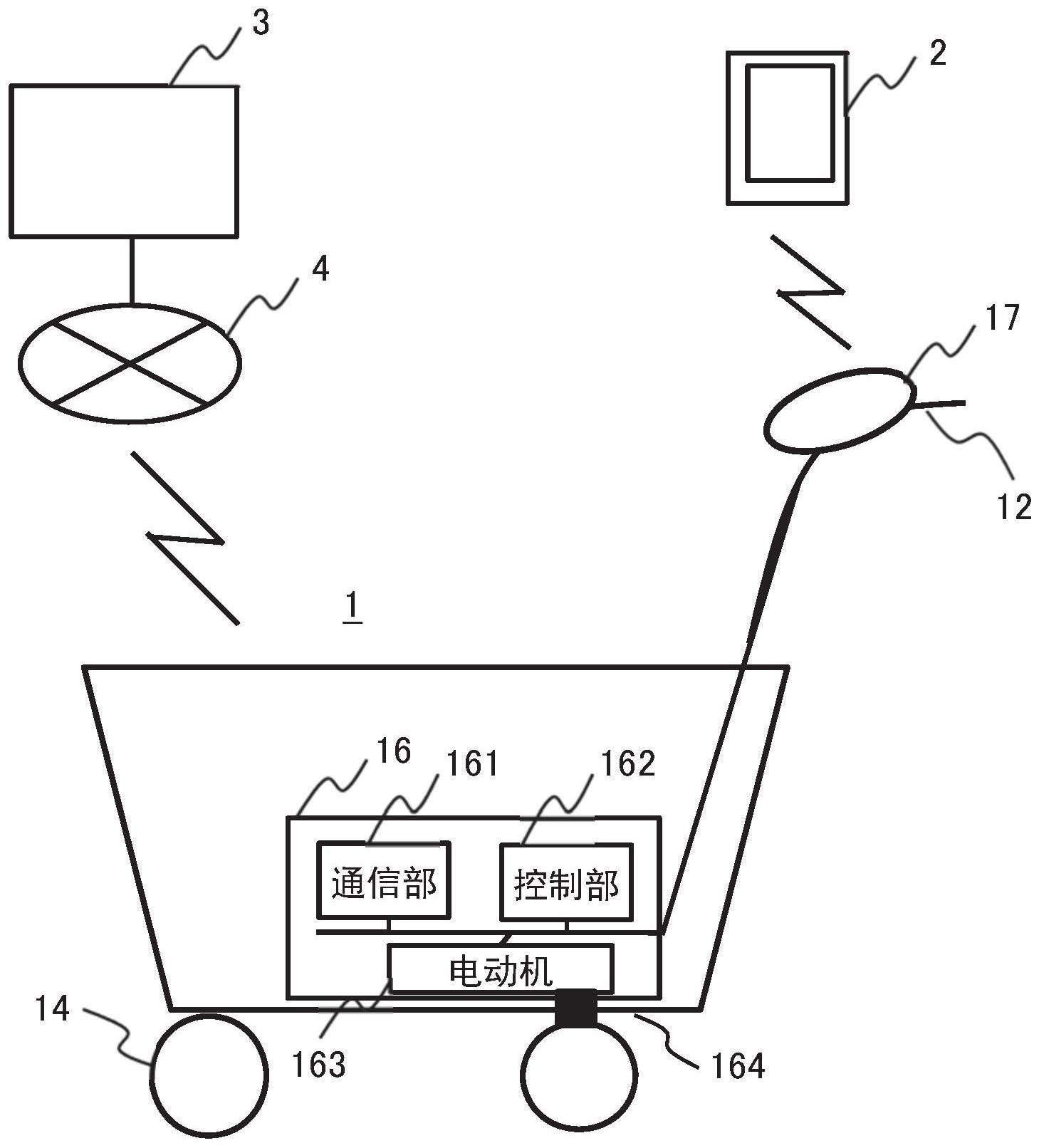
5、在本发明中,鉴于上述技术问题,对于手动行驶模式的搬运推车,根据其搬运的状况,执行与向自主行驶模式转变有关的控制。更具体地说,搬运推车具有通过使用者操作的手动行驶模式和自主行驶模式来搬运货物,其具有:由所述使用者操作的手推用把手;
6、装载货物的装载部;行驶用的车轮;连接所述手推用把手、所述装载部和所述车轮的主体部;以及控制所述自主行驶模式下的该搬运推车的行驶的控制部,所述控制部根据该搬运推车的搬运的状况,进行与向所述自主行驶模式转变有关的控制。
7、此外,在本发明中还包含该搬运推车的控制方法。
8、发明效果
9、根据本发明,能够更有效地进行与搬运推车的行驶模式切换有关的控制。
技术特征:
1.一种搬运推车,具有由使用者操作的手动行驶模式和自主行驶模式,用于搬运货物,其特征在于,包括:
2.如权利要求1所述的搬运推车,其特征在于,
3.如权利要求2所述的搬运推车,其特征在于,还包括:
4.如权利要求3所述的搬运推车,其特征在于,
5.如权利要求3所述的搬运推车,其特征在于,
6.如权利要求2所述的搬运推车,其特征在于,
7.如权利要求2所述的搬运推车,其特征在于,
8.如权利要求1所述的搬运推车,其特征在于,
9.如权利要求1所述的搬运推车,其特征在于,还包括:
10.如权利要求9所述的搬运推车,其特征在于,
11.如权利要求9所述的搬运推车,其特征在于,
12.一种搬运推车的控制方法,该搬运推车具有由使用者操作的手动行驶模式和自主行驶模式,用于搬运货物,其特征在于,
13.如权利要求12所述的搬运推车的控制方法,其特征在于,
14.如权利要求13所述的搬运推车的控制方法,其特征在于,
技术总结
本发明将活用搬运推车的运用特性并更有效率地进行与搬运推车的行驶模式切换有关的控制作为技术问题。用于解决上述技术问题的本发明的结构是一种搬运推车,具有由使用者操作的手动行驶模式和自主行驶模式来搬运货物,具有:由所述使用者操作的手推用把手;装载货物的车厢部;行驶用的车轮;连接所述手推用把手、所述车厢部和所述车轮的主体部;以及控制该搬运推车在所述自主行驶模式下的行驶的控制部,所述控制部根据关于该搬运推车的搬运的状况,进行与向所述自主行驶模式转变有关的控制。
技术研发人员:久继宏树,宁锐,加藤学
受保护的技术使用者:株式会社日立制作所
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!