一种汽车前端总成的安装系统及方法与流程
本发明涉及汽车装配,尤其涉及一种汽车前端总成的安装系统及方法。
背景技术:
1、前端总成包括汽车保险杠、水箱、冷凝器等部件。目前前端总成的合装方式是通过辅具夹起安装到车身上,再通过辅具上的拧紧轴将前端总成紧固在车身上。
2、但是现有的前端总成安装方式需要多人合作,多个操作人员通过辅具将前端总成与车身拼接后,并通过另外的操作人员将螺栓拧进前端总成和车身,操作复杂,效率低,劳动强度高。
技术实现思路
1、本发明的目的是提供一种汽车前端总成的安装系统及方法,能够实现前端总成和车身的自动拼接,减少人工成本和劳动强度,提高生产效率。
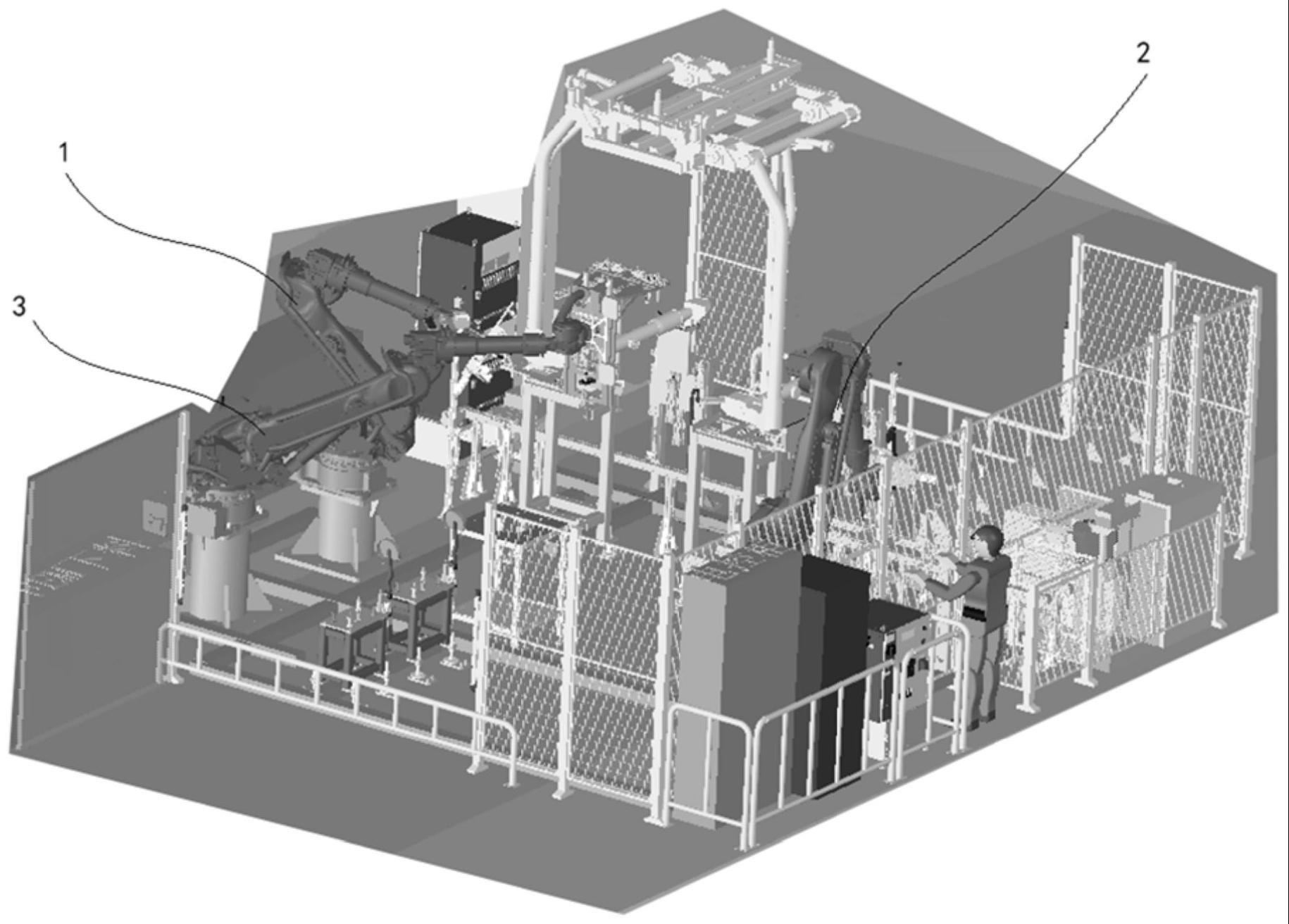
2、为了实现上述目的,本发明提供一种汽车前端总成的安装系统,其用于将前端总成安装于车身;包括:
3、第一拧紧机器人,所述第一拧紧机器人用于通过螺栓将前端总成的一侧与车身连接;
4、第一摄像头,所述第一摄像头用于分别获取螺栓位置以及车身一侧的特征信息;
5、第二拧紧机器人,所述第二拧紧机器人用于通过螺栓将前端总成的另一侧与车身连接;
6、第二摄像头,所述第二摄像头用于分别获取螺栓位置以及车身另一侧的特征信息;
7、安装机器人,所述安装机器人用于将前端总成与车身对接;
8、第三摄像头,所述第三摄像头用于获取前端总成的位置;
9、控制机构,所述控制机构分别于所述第一拧紧机器人、第一摄像头、第二拧紧机器人、第二摄像头、安装机器人、第三摄像头和控制机构电连接。
10、优选地,所述汽车前端总成的安装系统还包括螺栓供料机构,所述螺栓供料机构用于供应螺栓;所述螺栓供料机构包括用于将螺栓从外部输入的搬运机构和将螺栓运输到指定位置的运输机构。
11、优选地,所述搬运机构包括抓取手和第一直线模组,所述抓取手安装于所述第一直线模组。
12、优选地,所述运输机构包括承载板和第二直线模组,所述承载板安装于所述第二直线模组,所述承载板开设有多个用于放置螺栓的放置槽。
13、优选地,所述汽车前端总成的安装系统还包括车身输送机构,所述车身输送机构用于输送车身。
14、优选地,所述第一摄像头安装于所述第一拧紧机器人;所述第二摄像头安装于所述第二拧紧机器人,所述第三摄像头安装于所述安装机器人。
15、本发明还提供一种汽车前端总成的安装方法,包括步骤:
16、获取螺栓位置信息,根据所述螺栓位置信息,对螺栓进行抓取;
17、获取前端总成位置信息,根据所述前端总成位置信息,对前端总成进行抓取;
18、获取车身位置信息,根据所述车身位置信息,启动特征采集;
19、获取车身的第一特征信息,根据所述第一特征信息,确定前端总成与车身的拼接位置信息;
20、获取车身的第二特征信息,根据所述第二特征信息,确定螺栓的拧紧位置信息;
21、根据拼接位置信息,将前端总成与车身拼接;
22、根据拧紧位置信息,将螺栓插设到预设位置,并拧紧。
23、优选地,获取车身的第一特征信息包括获取车身两侧的定位孔信息。
24、优选地,所述定位孔信息包括定位孔的三维坐标系;根据所述第一特征信息,确定前端总成与车身的拼接位置信息包括:
25、判断两侧所述定位孔是否位于同一水平上,若否,则将车身重新调整至水平状态;若是,则将通过两个定位孔的中点位置信息,根据所述中点位置信息确定拼接位置信息。
26、优选地,获取车身的第二特征信息包括获取车身两侧的纵梁面的位置信息和纵梁面上的螺栓孔位置信息。
27、实施本发明的实施例,具有以下技术效果:
28、本发明的系统通过第一摄像头、第二摄像头和第三摄像头获取车身的特征信息,第一拧紧机器人、第二拧紧机器人和安装机器人根据特征信息将车身和前端总成进行拼接和拧紧,整个过程自动完成,实现前端总成和车身的自动拼接,减少人工成本和劳动强度,提高生产效率。
技术特征:
1.一种汽车前端总成的安装系统,其用于将前端总成安装于车身;其特征在于,包括:
2.根据权利要求1所述的汽车前端总成的安装系统,其特征在于,所述汽车前端总成的安装系统还包括螺栓供料机构,所述螺栓供料机构用于供应螺栓;所述螺栓供料机构包括用于将螺栓从外部输入的搬运机构和将螺栓运输到指定位置的运输机构。
3.根据权利要求2所述的汽车前端总成的安装系统,其特征在于,所述搬运机构包括抓取手和第一直线模组,所述抓取手安装于所述第一直线模组。
4.根据权利要求2所述的汽车前端总成的安装系统,其特征在于,所述运输机构包括承载板和第二直线模组,所述承载板安装于所述第二直线模组,所述承载板开设有多个用于放置螺栓的放置槽。
5.根据权利要求1所述的汽车前端总成的安装系统,其特征在于,所述汽车前端总成的安装系统还包括车身输送机构,所述车身输送机构用于输送车身。
6.根据权利要求1所述的汽车前端总成的安装系统,其特征在于,所述第一摄像头安装于所述第一拧紧机器人;所述第二摄像头安装于所述第二拧紧机器人,所述第三摄像头安装于所述安装机器人。
7.一种汽车前端总成的安装方法,其特征在于,包括步骤:
8.根据权利要求7所述的汽车前端总成的安装方法,其特征在于,获取车身的第一特征信息包括获取车身两侧的定位孔信息。
9.根据权利要求8所述的汽车前端总成的安装方法,其特征在于,所述定位孔信息包括定位孔的三维坐标系;根据所述第一特征信息,确定前端总成与车身的拼接位置信息包括:
10.根据权利要求8所述的汽车前端总成的安装方法,其特征在于,获取车身的第二特征信息包括获取车身两侧的纵梁面的位置信息和纵梁面上的螺栓孔位置信息。
技术总结
本发明涉及汽车装配技术领域,尤其涉及一种汽车前端总成的安装系统及方法,汽车前端总成的安装系统包括第一拧紧机器人、第一摄像头、第二拧紧机器人、第二摄像头、安装机器人、第三摄像头和控制机构,第一拧紧机器人用于通过螺栓将前端总成的一侧与车身连接;第一摄像头用于分别获取螺栓位置以及车身一侧的特征信息;第二拧紧机器人用于通过螺栓将前端总成的另一侧与车身连接;第二摄像头用于分别获取螺栓位置以及车身另一侧的特征信息;安装机器人用于将前端总成与车身对接;第三摄像头用于获取前端总成的位置。本发明能够实现前端总成和车身的自动拼接,减少人工成本和劳动强度,提高生产效率。
技术研发人员:刘德志,高勇,周维荣,陈赛荣,陈堪汉
受保护的技术使用者:广汽本田汽车有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!