一种基于无人机协同的爬墙机器人
本发明涉及爬墙机器人,具体为一种基于无人机协同的爬墙机器人。
背景技术:
1、随着经济社会的发展,在土地资源越来越紧张的城市建设中,民宅、工业厂房、化工厂等越来越多的现代化高层建筑拔地而起,在给我们的生活和城市发展带来便利的同时,由于具有人员密集、可燃物多、结构复杂等特点,也给人们的安全生产带来许多隐患,特别是在高空、腐蚀性及辐射性强等恶劣环境下的作业需求;
2、故一种爬墙类机器人应运而生,除了兼有地面运动之外,还可在具有垂直墙面的高空环境中作业,进而可在危险环境中进行探测勘察、救援等任务,其中,在现有的技术手段中,对于爬墙类机器人垂直运行的吸附方式,主要包括真空吸附及磁力吸附的方式,但真空吸附对于墙面的平整度要求较高,稳定性及适应性较低;而磁力吸附则只能在具有磁性介质的表面运动,局限性太大,适用的范围较小。
3、故亟需一种利用旋翼产生推力而迫使该爬墙机器人在墙面上垂直行走的运行方式,以解决上述现有的爬墙机器人在垂直行走时所存在的缺陷。
技术实现思路
1、(一)解决的技术问题
2、本发明提供了一种基于无人机协同的爬墙机器人,具备利用旋翼推力使其贴在墙面上行走,不仅结构轻便,稳定性高,而且运动的灵活度较高,适用范围较广的优点,解决了在现有的爬墙机器人垂直运行的吸附方式中,真空吸附对于墙面的平整度要求较高,稳定性及适应性较低;而磁力吸附则只能在具有磁性介质的表面运动,局限性太大,适用范围较小的问题。
3、(二)技术方案
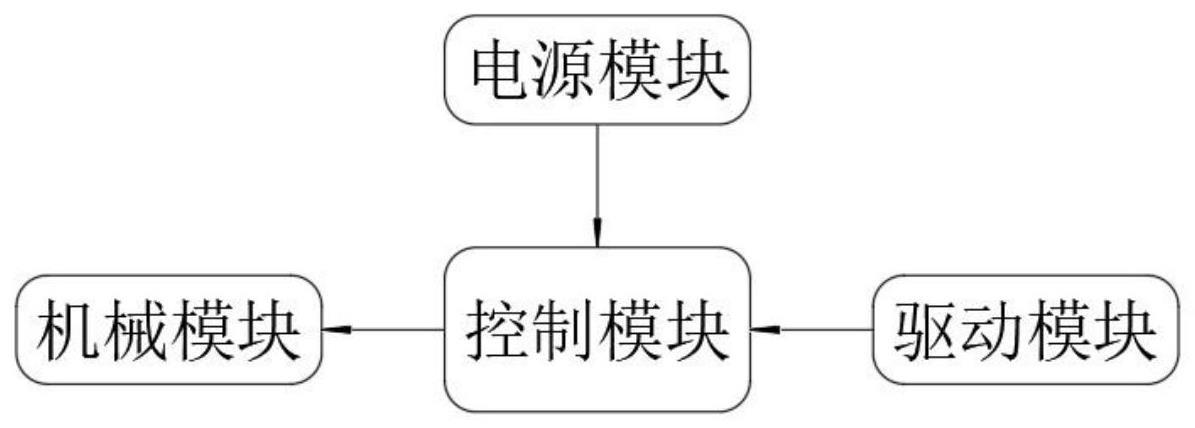
4、本发明提供如下技术方案:一种基于无人机协同的爬墙机器人,包括机械模块、电源模块、驱动模块以及控制模块,所述机械模块包括主体结构、旋翼机构和机械臂,所述主体结构顶端的四个拐角处分别设有一组旋翼机构,且在主体结构顶端的中部设有机械臂,并在机械臂上固定安装有传感器,并在其上设有摄像头;
5、所述电源模块为该爬墙机器人上的主体结构、旋翼机构以及机械臂提供动力来源;
6、所述驱动模块有电机和驱动板组成,所述电机的作用是为该爬墙机器人上主体结构和旋翼机构的运行提供动力支持;所述驱动板的主要作用是接收控制模块上的信号并进行识别、执行;
7、所述控制模块根据机械模块上传感器的实时环境信息反馈进行算法融合,并通过驱动模块对机械模块上主体结构和旋翼机构的运行进行操控,同时,控制其上机械臂的工作情况。
8、优选的,所述主体结构的前后两侧分别固定安装有一组联动支架,且在联动支架的底端设有行走轮组,所述联动支架的顶端设有一组与驱动模块上无刷电机传动连接的主动轮,所述联动支架的左右两侧分别销接有一组液压缸体,且液压缸体的另一端销接有支撑杆,所述支撑杆的一端与联动支架的端面销接,而其另一端销接有导向轮,所述主动轮、导向轮以及行走轮组的外围设有一组履带。
9、优选的,所述联动支架上履带左右两侧底部倾斜段的延长线,在随着两组导向轮旋转移动偏斜的过程中始终呈90°夹角,使得该爬墙机器人在垂直墙面上移动穿过凸起的横梁时,确保履带上的某一段可始终与墙面接触而为该爬墙机器人提供向前的推力。
10、优选的,四组所述旋翼机构上的四组无刷电机上的旋翼拉力之和为该爬墙机器人提供吸附力,并使其克服自身重力的影响而贴合在墙面上。
11、优选的,所述该爬墙机器人的运行包括行走控制模组和旋翼控制模组:
12、所述行走控制模组上设有底盘电机,并利用主体结构上的联动支架控制该爬墙机器人的行动轨迹时,通过读取机械臂上传感器的指令参数,并判断指令的类型,进而调控该爬墙机器人前进、后退、左转或右转动作;
13、所述旋翼控制模组设有旋翼电机,并采用pid控制方法中的增量式而分别调控四组旋翼机构中旋翼的旋转速度。
14、优选的,所述行走控制还包括红外避障单元,通过固定安装在传感器上的红外传感器识别该爬墙机器人前方的障碍物,并将采集后的信号反馈给控制模块:
15、或是通过改变该爬墙机器人的行动轨迹以避开该障碍物;
16、或是通过调整履带左右两侧底部倾斜端的倾斜角度及旋翼控制模组,控制该爬墙机器人越过障碍物。
17、(三)有益效果
18、本发明具备以下有益效果:
19、1、该基于无人机协同的爬墙机器人,对于机械模块上旋翼机构的设置,利用旋翼机构旋转时所产生的推力使得该爬墙机器人紧密地贴合在墙面上行走,并配合履带的驱动方式,与现有的爬墙机器人相比,结构紧凑且运动地灵活性较高,并可在任意垂直的墙面上运行而不受限制,适用的范围较广且稳定性较高。
20、2、该基于无人机协同的爬墙机器人,对于联动支架及其上结构的设置,通过调整履带左右两侧底部倾斜端的倾斜角度,并配合旋翼控制模组,确保履带上的某一段可始终与墙面接触而为该爬墙机器人提供向前的推力,进而越过垂直墙面上无法绕行避开的凸起横梁,进一步提高了该爬墙机器人在复杂环境下的适应性。
技术特征:
1.一种基于无人机协同的爬墙机器人,包括机械模块、电源模块、驱动模块以及控制模块,其特征在于:
2.根据权利要求1所述的一种基于无人机协同的爬墙机器人,其特征在于:所述主体结构(1)的前后两侧分别固定安装有一组联动支架(4),且在联动支架(4)的底端设有行走轮组(5),所述联动支架(4)的顶端设有一组与驱动模块上无刷电机传动连接的主动轮(6),所述联动支架(4)的左右两侧分别销接有一组液压缸体(7),且液压缸体(7)的另一端销接有支撑杆(8),所述支撑杆(8)的一端与联动支架(4)的端面销接,而其另一端销接有导向轮(9),所述主动轮(6)、导向轮(9)以及行走轮组(5)的外围设有一组履带(10)。
3.根据权利要求2所述的一种基于无人机协同的爬墙机器人,其特征在于:所述联动支架(4)上履带(10)左右两侧底部倾斜段的延长线,在随着两组导向轮(9)旋转移动偏斜的过程中始终呈90°夹角,使得该爬墙机器人在垂直墙面上移动穿过凸起的横梁时,确保履带(10)上的某一段可始终与墙面接触而为该爬墙机器人提供向前的推力。
4.根据权利要求3所述的一种基于无人机协同的爬墙机器人,其特征在于:四组所述旋翼机构(2)上的四组无刷电机上的旋翼拉力之和为该爬墙机器人提供吸附力,并使其克服自身重力的影响而贴合在墙面上。
5.根据权利要求4所述的一种基于无人机协同的爬墙机器人,其特征在于:所述该爬墙机器人的运行包括行走控制模组和旋翼控制模组:
6.根据权利要求5所述的一种基于无人机协同的爬墙机器人,其特征在于:所述行走控制还包括红外避障单元,通过固定安装在传感器上的红外传感器识别该爬墙机器人前方的障碍物,并将采集后的信号反馈给控制模块:
技术总结
本发明涉及爬墙机器人技术领域,且公开了一种基于无人机协同的爬墙机器人,包括机械模块、电源模块、驱动模块以及控制模块,所述机械模块包括主体结构、旋翼机构和机械臂,所述主体结构顶端的四个拐角处分别设有一组旋翼机构,且在主体结构顶端的中部设有机械臂;所述电源模块为该爬墙机器人上的主体结构、旋翼机构以及机械臂提供动力来源。该基于无人机协同的爬墙机器人,对于机械模块上旋翼机构的设置,利用旋翼机构旋转时所产生的推力使得该爬墙机器人紧密地贴合在墙面上行走,并配合履带的驱动方式,结构紧凑且运动地灵活性较高,并可在任意垂直的墙面上运行而不受限制,适用的范围较广且稳定性较高。
技术研发人员:李侠,李敬兆,刘伟楠
受保护的技术使用者:合肥财经职业学院
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!