一种转向助力电机控制方法
本发明属于商用车转向控制系统领域,特别是涉及一种转向助力电机控制方法。
背景技术:
1、转向系统是商务车在行驶过程中,为转动方向以及平稳运行过程中提供助力的控制系统。传统的液压助力转向系统阻力较大且效率较低,长期使用后保养不当会容易泄露,可能会引起爆炸等事故。
2、改用电动助力转向系统,相比于液压动力转向,提高了安全性,而且油耗低,便于操作,因此被很多汽车厂商所采用。传统的电动液压助力转向系统的电机采用的是体积大、效率低的异步电机。
技术实现思路
1、本发明所要解决的技术问题在于提供一种电动助力转向方法,解决了传统液压助力转向系统阻力大、效率低以及安全性能低的问题。
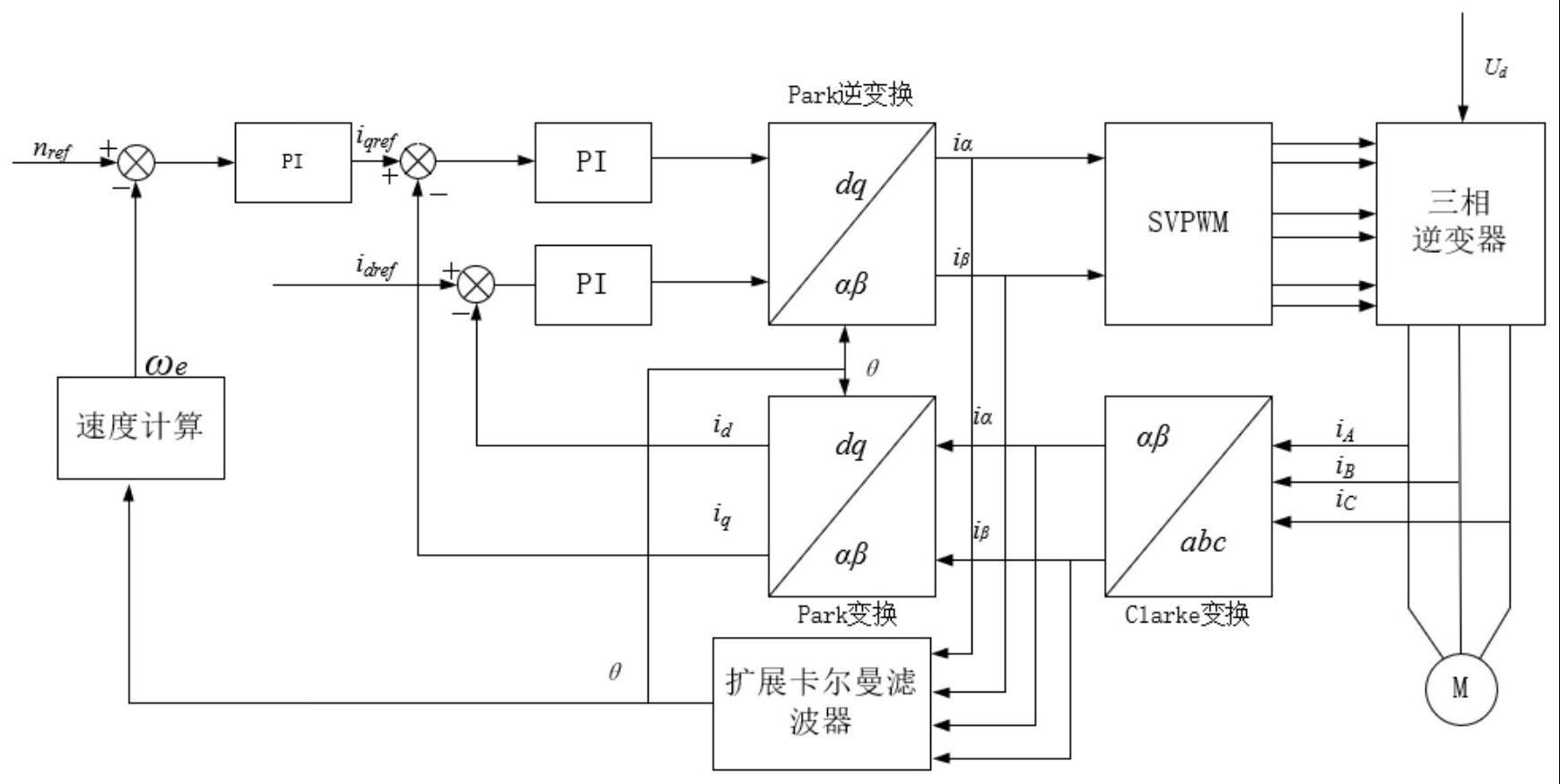
2、本发明是这样实现的,一种转向助力电机控制系统,包括:采用永磁同步电机系统作为转向助力电机;
3、采集电流电压传感器检测出永磁同步电机系统三相逆变器的三相电流以及电压,三相电流经过clark变换后可得到iα、iβ的电流,电压经过clark坐标变换变换成uα、uβ的电流,由输入量以及输出流输入到卡尔曼滤波器估计出电角度以及角速度;
4、把拓展卡尔曼滤波器估计出的电角度运用到park变换以及逆变换中,q轴的电流输入由设定的固定值与实际值相减得到,d轴的电流为励磁电流,用来产生电磁场,将电流控制成id=0,电流经过内环的pi调节器再经过park变换进入svpwm调制,产生能够控制电机的信号。
5、进一步地,拓展卡尔曼滤波器估计出电角度以及角速度包括:
6、永磁同步电机的状态变量x=[id,iq,θ,ωe]t,输入量为u=[ud,uq]t,输出量为y=[id,iq]t,永磁同步电机的状态方程表示为:
7、
8、
9、在方程中f(x)为:
10、
11、进行离散化:
12、x(k+1)=f[x(k)+b(k)u(k)+w(k)]
13、y(x)=c(k)·x(k)+v(k)
14、由上式得出,拓展卡尔曼滤波是以电压为输入量,以q轴d轴上的电流为输出量,状态变量为q轴d轴上的电流,以及电角度和角速度,将输入量以及输出量输入到卡尔曼滤波器估计出电角度以及角速度。
15、进一步地,输入量u由电压方程计算得到:
16、
17、其中磁链分量由磁链方程计算得到:
18、
19、上式中,ud、uq是由定子三相电压经过坐标变换成的d-q轴分量;id、iq是由定子三相电流经过坐标变换成的d-q轴分量;ld、lq为定子绕组d-q轴电感;ψd、ψq为定子磁链d-q轴分量;r为定子上的等效电阻,;ωe为转子电角度的速度。
20、进一步地,pi调节器采用模糊pi算法。
21、本发明与现有技术相比,有益效果在于:本发明采用永磁同步电机系统,永磁同步电机因内部结构简单、占用空间小、重量轻、能量转换效率高、造价成本低等优点而被广泛应用在航空航天、无人机、和电动汽车等领域。衡量伺服系统整体性能的好坏的关键是系统是否有稳定性以及较强的抗干扰能力,为了使系统有较好的稳定性和较强的抗干扰能力,采用合适的控制策略及其重要。传统的永磁电机是用霍尔传感器检测转子位置,为了降低制造成本,以及减少系统的体积,本申请提出采用无位置传感器的控制策略。将运用模糊pi算法对永磁同步电机控制,以及运用扩展卡尔曼滤波器作为观测器对永磁同步电机转子进行跟踪。使用模糊pi控制,使得pi能够自适应的调整pi参数,替代了传统pi调参步骤,运用拓展卡尔曼滤波观测器代替了传统传感器,节省空间与成本。
技术特征:
1.一种转向助力电机控制方法,其特征在于,包括:
2.按照权利要求1所述的转向助力电机控制方法,其特征在于,拓展卡尔曼滤波器估计出电角度以及角速度包括:
3.按照权利要求2所述的转向助力电机控制方法,其特征在于,输入量u由电压方程计算得到:
4.按照权利要求1所述的转向助力电机控制方法,其特征在于,pi调节器采用模糊pi算法。
技术总结
本发明适用于商务车领域,为解决商务车在行驶过程中,传统的液压助力转向系统阻力较大且效率较低,长期使用后保养不当会容易泄露,可能会引起爆炸等事故等问题。本发明提供了一种转向助力电机控制方法,电动辅助转向电机控制,电动辅助转向电机运用永磁同步电机。通过运用模糊PI算法可以精确,快速的调制到参考值。同时采用拓展卡尔曼滤波器可以估算永磁同步电机的转子位置,传统传感器检测转子位置,可以减小控制器的体积以及减小成本。最终实验结果可得出,基于PI算法以及拓展卡尔曼滤波器的永磁同步电机控制可以运用在商用车电动辅助转向电机控中。
技术研发人员:刘卫平,卢希全,杨祥卓,李任,毕泽天,张兴
受保护的技术使用者:吉林大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!