一种储能腿部结构及机器人的制作方法
本发明涉及机器人,特别是涉及一种储能腿部结构及机器人。
背景技术:
1、机器人是一种能够半自主或全自主工作的智能机器,机器人具有感知、决策、执行等基本特征,可以辅助甚至替代人类完成危险、繁重、复杂的工作,提高工作效率与质量,服务人类生活,扩大或延伸人的活动及能力范围。
2、随着科技的进步,机器人的应用越来越普遍化,比如清洁机器人、货运机器人、巡检机器人等等,可实现智能控制,现有的机器人一般包括机架和移动轮组,一些机器人包含有腿部结构与移动轮组配合实现各种动作,而在动作过程中需要腿部结构和驱动元件配合来做出各种动作。现有的机器人驱动结构和关节在各种动作过程中都是通过电机直接驱动,在卧倒时由于机器人机身重力作用下,电机的负载较小,当站立时需要将机器人整个机身顶起,电机负载较大,故可针对现有的机器人结构做进一步改进。
技术实现思路
1、为解决上述问题,本发明提供一种通过在第二固定基座和第二驱动装置上设置了蓄力扭簧,通过扭簧的作用下使得驱动装置在驱动连杆装置时起到挤压蓄力作用,当需要复位时通过扭簧的反弹作用下能够快速复位,减少驱动装置负载的储能腿部结构及机器人。
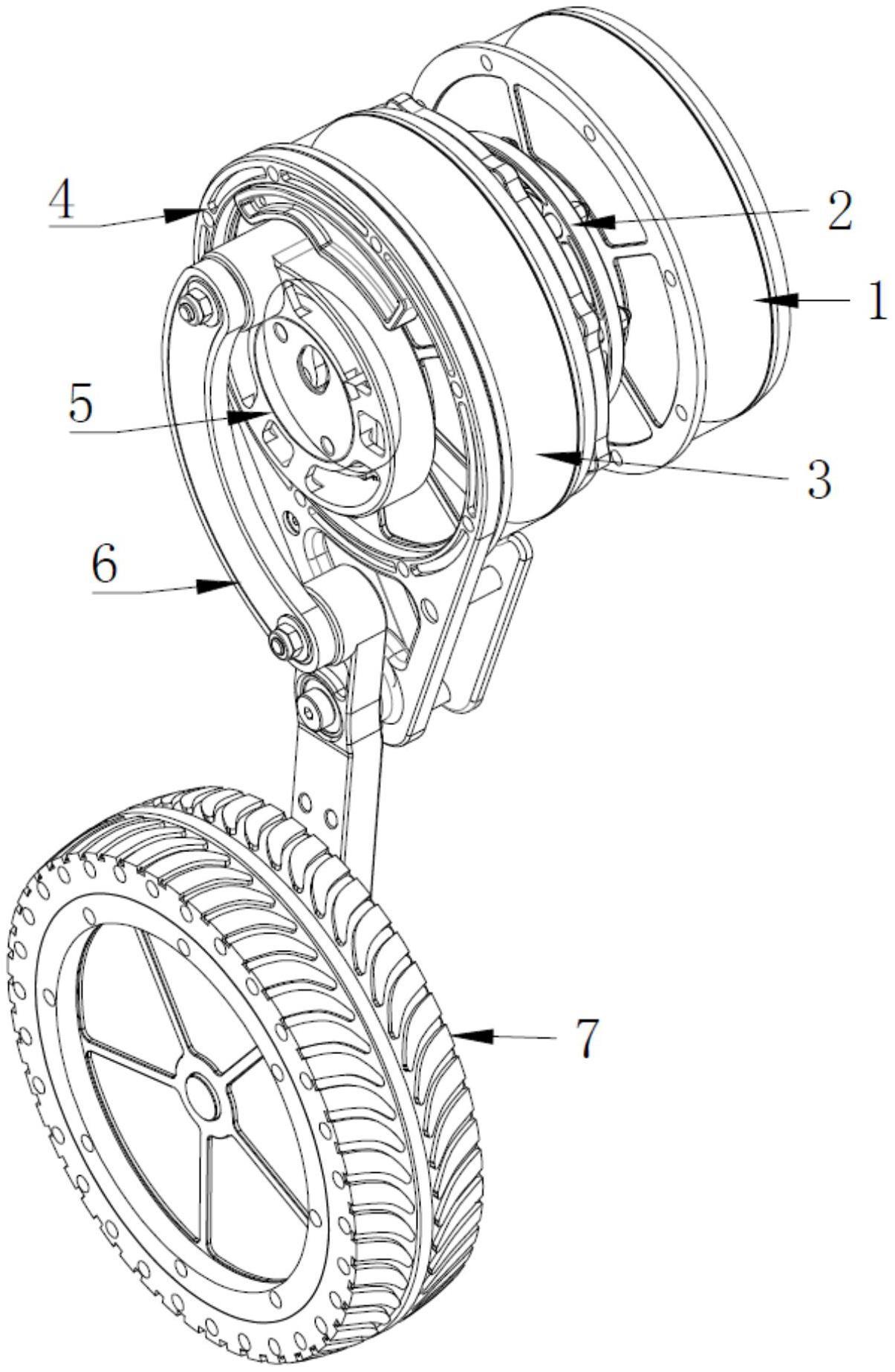
2、本发明所采用的技术方案是:一种储能腿部结构,包括第一驱动装置、连接于第一驱动装置的第一驱动架、连接于第一驱动架的第二驱动装置、连接于第二驱动装置的第二驱动架和蓄力装置、连接于蓄力装置和第二驱动架的连杆装置、及连接于连杆装置的第三驱动装置;所述第二驱动装置设有第二固定基座,所述蓄力装置包括连接于第二固定基座的蓄力盘、设于蓄力盘内并将蓄力盘与第二驱动装置驱动连接的蓄力扭簧。
3、对上述方案的进一步改进为,所述第一驱动装置设有第一固定基座,所述第一驱动架包括连接于第一固定基座连接的第一固定连接盘、连接于第一固定连接盘的连接柱、及连接于连接柱的第一活动连接盘,所述第一活动连接盘与第二驱动装置连接。
4、对上述方案的进一步改进为,所述第一驱动装置包括安装于第一固定基座的第一转轴组件、设于第一转轴组件的第一定子组件、连接于第一转轴组件的第一转子外壳、及设于第一转子外壳内并与第一定子组件配合的第一转子组件。
5、对上述方案的进一步改进为,所述第二驱动装置包括安装于第二固定基座的第二转轴组件、设于第二转轴组件的第二定子组件、连接于第二转轴组件的第二转子外壳、及设于第二转子外壳内并与第二定子组件配合的第二转子组件;所述第二驱动架安装于第二转子外壳,所述第一活动连接盘安装于第二转子外壳。
6、对上述方案的进一步改进为,所述第三驱动装置包括第三固定基座、安装于第三固定基座的第三转轴组件、设于第三转轴组件的第三定子组件、连接于第三转轴组件的第三转子外壳、及设于第三转子外壳内并与第三定子组件配合的第三转子组件;所述第三固定基座连接于连杆装置,所述第三转子外壳的外径连接有轮毂圈。
7、对上述方案的进一步改进为,所述第二驱动架包括第二固定连接盘、及连接于第二固定连接盘的第二活动连接盘,所述第二固定连接盘连接于第三驱动装置,所述第二活动连接盘用于承托第二驱动装置一侧。
8、对上述方案的进一步改进为,所述第二驱动装置安装有限位块,所述限位块设有限位槽,所述蓄力盘设有限位柱,所述限位槽用于限位柱限位,所述限位柱设有第一转轴元件,所述第一转轴元件与连杆装置连接。
9、对上述方案的进一步改进为,所述蓄力盘包括连接内盘、连接外盘、及设于连接内盘与连接外盘之间的蓄力槽,所述蓄力扭簧设于蓄力槽内,所述蓄力扭簧至少设有一圈的扭簧圈。
10、对上述方案的进一步改进为,所述连杆装置包括连接于蓄力盘的第一连杆、及连接于第一连杆和第二驱动架的第二连杆,所述第一连杆为弧形连杆,所述第一连杆的弧形半径为60mm~100mm;所述第一连杆设有第二转轴元件,所述第二转轴元件与第二连杆连接。
11、对上述方案的进一步改进为,所述第二连杆设有第三转轴元件,所述第三转轴元件与第二驱动架连接,所述第二连杆设有连接台,所述连接台与第三驱动装置连接。
12、一种机器人,包括所述的储能腿部结构。
13、本发明的有益效果是:
14、相比现有的机器人腿部结构,本发明设置了三组的驱动装置,通过三组的驱动装置配合下,能够对机器人的腿部结构进行驱动,第一驱动装置配合第二驱动装置实现腿部关节的动力,实现腿部的站立和卧倒动作,同时设置蓄力装置和连杆装置配合,使得连杆装置在驱动作用下具有蓄力作用,当返回原状态时具有助力作用,具体的是通过在第二固定基座和第二驱动装置上设置了蓄力扭簧,通过扭簧的作用下使得驱动装置在驱动连杆装置时起到挤压蓄力作用,当需要复位时通过扭簧的反弹作用下能够快速复位,减少驱动装置负载。具体是,第一驱动装置、连接于第一驱动装置第一驱动架、连接于第一驱动架的第二驱动装置、连接于第二驱动装置的第二驱动架和蓄力装置、连接于蓄力装置和第二驱动架的连杆装置、及连接于连杆装置的第三驱动装置;所述第二驱动装置设有第二固定基座,所述蓄力装置包括连接于第二固定基座的蓄力盘、设于蓄力盘内并将蓄力盘与第二驱动装置驱动连接的蓄力扭簧。在驱动过程中,可通过蓄力扭簧配合蓄力盘使得驱动装置的驱动结构具有蓄力作用,当返回原状态时起到辅助作用,减少电机本体的负载。在驱动连杆装置时,通过第一连杆和第二连杆的作用下,使得机器人可实现站立和卧底等动作,当从卧倒至站立动作时,蓄力扭簧作用回弹作用,减速电机负载。
技术特征:
1.一种储能腿部结构,其特征在于:包括第一驱动装置、连接于第一驱动装置的第一驱动架、连接于第一驱动架的第二驱动装置、连接于第二驱动装置的第二驱动架和蓄力装置、连接于蓄力装置和第二驱动架的连杆装置、及连接于连杆装置的第三驱动装置;所述第二驱动装置设有第二固定基座,所述蓄力装置包括连接于第二固定基座的蓄力盘、设于蓄力盘内并将蓄力盘与第二驱动装置驱动连接的蓄力扭簧。
2.根据权利要求1所述的储能腿部结构,其特征在于:所述第一驱动装置设有第一固定基座,所述第一驱动架包括连接于第一固定基座连接的第一固定连接盘、连接于第一固定连接盘的连接柱、及连接于连接柱的第一活动连接盘,所述第一活动连接盘与第二驱动装置连接。
3.根据权利要求2所述的储能腿部结构,其特征在于:所述第一驱动装置包括安装于第一固定基座的第一转轴组件、设于第一转轴组件的第一定子组件、连接于第一转轴组件的第一转子外壳、及设于第一转子外壳内并与第一定子组件配合的第一转子组件;
4.根据权利要求3所述的储能腿部结构,其特征在于:所述第三驱动装置包括第三固定基座、安装于第三固定基座的第三转轴组件、设于第三转轴组件的第三定子组件、连接于第三转轴组件的第三转子外壳、及设于第三转子外壳内并与第三定子组件配合的第三转子组件;所述第三固定基座连接于连杆装置,所述第三转子外壳的外径连接有轮毂圈。
5.根据权利要求1所述的储能腿部结构,其特征在于:所述第二驱动架包括第二固定连接盘、及连接于第二固定连接盘的第二活动连接盘,所述第二固定连接盘连接于第三驱动装置,所述第二活动连接盘用于承托第二驱动装置一侧。
6.根据权利要求1所述的储能腿部结构,其特征在于:所述第二驱动装置安装有限位块,所述限位块设有限位槽,所述蓄力盘设有限位柱,所述限位槽用于限位柱限位,所述限位柱设有第一转轴元件,所述第一转轴元件与连杆装置连接。
7.根据权利要求1所述的储能腿部结构,其特征在于:所述蓄力盘包括连接内盘、连接外盘、及设于连接内盘与连接外盘之间的蓄力槽,所述蓄力扭簧设于蓄力槽内,所述蓄力扭簧至少设有一圈的扭簧圈。
8.根据权利要求1所述的储能腿部结构,其特征在于:所述连杆装置包括连接于蓄力盘的第一连杆、及连接于第一连杆和第二驱动架的第二连杆,所述第一连杆为弧形连杆,所述第一连杆的弧形半径为60mm~100mm;所述第一连杆设有第二转轴元件,所述第二转轴元件与第二连杆连接。
9.根据权利要求8所述的储能腿部结构,其特征在于:所述第二连杆设有第三转轴元件,所述第三转轴元件与第二驱动架连接,所述第二连杆设有连接台,所述连接台与第三驱动装置连接。
10.一种机器人,其特征在于:包括权利要求1~9任意一项所述的储能腿部结构。
技术总结
本发明涉及机器人技术领域,具体涉及一种储能腿部结构及机器人,包括第一驱动装置、连接于第一驱动装置的第一驱动架、连接于第一驱动架的第二驱动装置、连接于第二驱动装置的第二驱动架和蓄力装置、连接于蓄力装置和第二驱动架的连杆装置、及连接于连杆装置的第三驱动装置;第二驱动装置设有第二固定基座,蓄力装置包括连接于第二固定基座的蓄力盘、设于蓄力盘内并将蓄力盘与第二驱动装置驱动连接的蓄力扭簧。本发明通过在第二固定基座和第二驱动装置上设置了蓄力扭簧,通过扭簧的作用下使得驱动装置在驱动连杆装置时起到挤压蓄力作用,当需要复位时通过扭簧的反弹作用下能够快速复位,减少驱动装置负载。
技术研发人员:郁亚南,张益通,吴建波,廖铉泓,蓝博
受保护的技术使用者:东莞市本末科技有限公司
技术研发日:20220316
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!