多用途复合机动行走系统和四轮行走载具的制作方法
本技术涉及轮系行走系统领域,特别是涉及多用途复合机动行走系统。
背景技术:
1、通常来说,轮系行走系统或支撑并移动各种类型负载的系统是被人们所熟知的。然而,现有这些系统均有许多的局限性,如无法重新配置其结构形式,用以提供可调节的载荷支撑面或附加的横向支撑。此外,它们的转向系统局限于使用单一转向操纵机构,因此限制了现有轮系行走系统在商店、仓库、工厂或其他地方的通道里小范围近距离的行驶能力。
2、因此,本申请在现有技术基础上,提供一种多用途复合机动行走系统,使其既方便重新配置结构形式,又便于在狭窄通道里行驶,以解决上述现有问题。
技术实现思路
1、本实用新型要解决的技术问题是提供多用途复合机动行走系统,使其既方便重新配置结构形式,又便于在狭窄通道里行驶,从而克服现有的轮系行走系统的不足。
2、为解决上述技术问题,本实用新型提供一种多用途复合机动行走系统,包括若干实施例,所述复合机动行走系统(mpms)由多个平行机动行走单元组成。每个复合机动行走系统(mpms)由两个以上的独立平行机动行走单元(pmus)组成,彼此通过中间连接结构相互耦合。每个平行机动行走单元pmu包括两个或两个以上的动力或非动力行走轮系总成,各行走轮系总成由一个独立的转向机构保持彼此相互平行。独立的转向机构可以是齿轮啮合总成,皮带和皮带轮传动总成,链条和链轮传动总成或刚性平行杆件总成。独立的中间连接结构可以设计为长度可调、以及旋转可调,以及长度与旋转同时可调的形式结构。可调节的连接结构,在保持复合机动行走系统mpms的整体负载支撑面的同时,也允许平行机动行走单元pmu之间的相对运动。
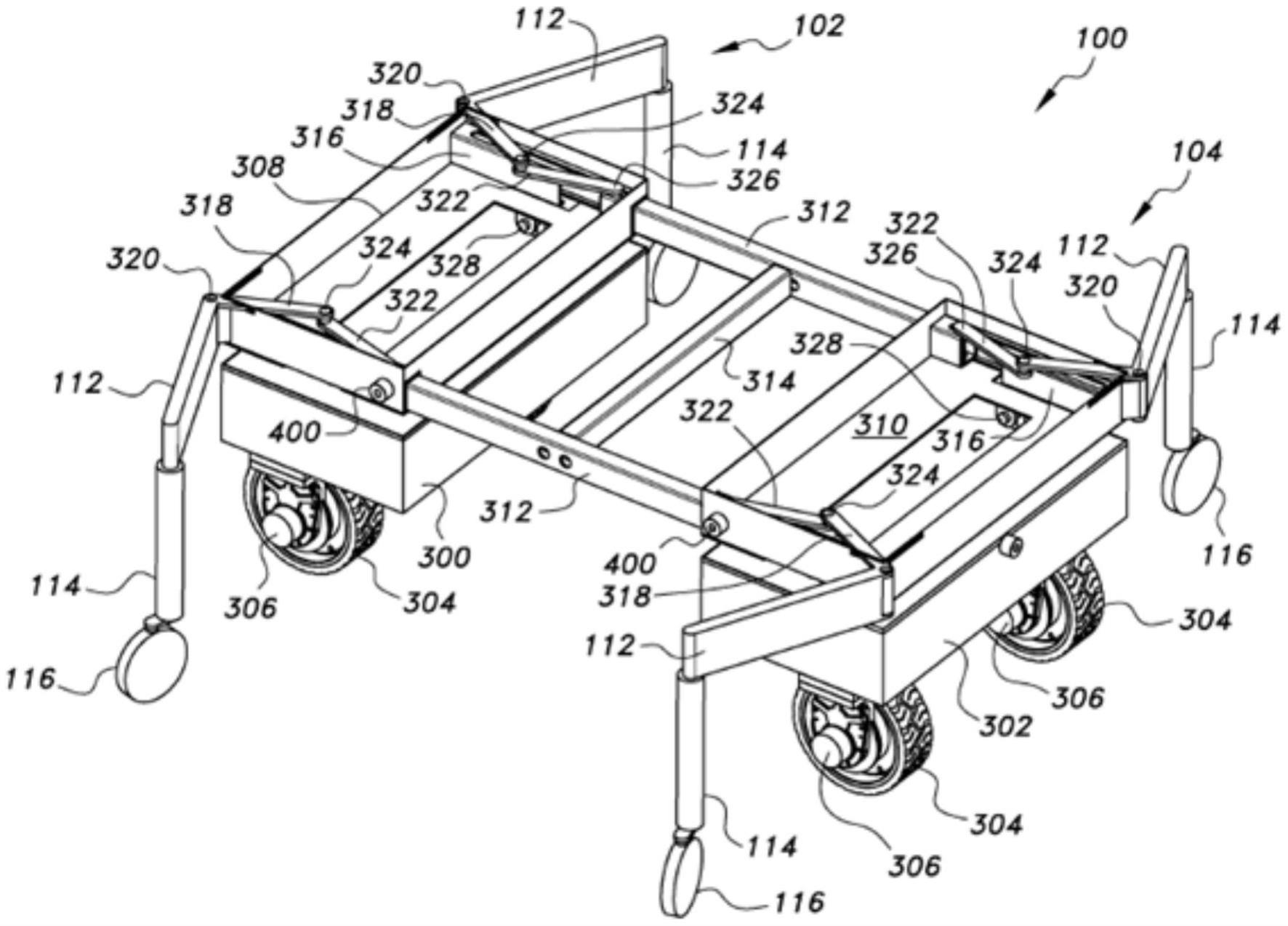
3、在复合机动行走系统mpms的第二实施例中,两个独立的平行机动行走单元pmu刚性连接,每个pmu都有一个独立的转向动力机构。在第一实施例中,两个独立的平行机动行走单元pmu通过拉伸框架彼此连接,用以调整两个pmu二者之间的相对距离。与第二实施例一样,每个pmu都有一个独立的转向动力机构,沿相反方向驱动pmu的行走轮系总成,拉伸框架可以伸缩。当拉伸框架展开时,联动四个带有脚轮的安全支腿横向展开,为 mpms整机提供辅助的稳定性,同时安全支腿在拉伸框架收回时一并合拢。在第三实施例中,四个平行机动行走单元pmu通过铰接形式相互连接,形成一个矩形结构。与前两个实施例中一样,每个pmu都有一个独立的转向动力机构,因此每个平行机动行走单元pmu可以相对于彼此进行移动从而完成所需要的行走配置。
4、双操纵控制器可用于控制具有两个独立平行机动行走单元pmu的mpms。其中两个控制器可用于控制具有四个独立pmu的mpms。其他类型的控制器,包括操纵杆类型和其他类型的可以用来控制方向盘和驱动行走轮系。
5、该实用新型的以上描述及其特点将结合附图进行详细说明。
技术特征:
1.一种多用途复合机动行走系统,其特征在于,包括:
2.根据权利要求1所述的多用途复合机动行走系统,其特征在于,所述复合机动行走系统是一个复合平行机动行走系统;
3.根据权利要求2所述的多用途复合机动行走系统,其特征在于,还包括:
4.根据权利要求2所述的多用途复合机动行走系统,其特征在于,其中,第一独立转向机构和第二独立转向机构采用齿轮啮合机构、皮带轮传动机构、链条链轮传动机构或刚性连杆组合机构实现各轮系的平行转向。
5.根据权利要求2所述的多用途复合机动行走系统,其特征在于,还包括一个支撑负载的承重面板,通过铰接机构连接到多用途复合机动行走系统的上部,铰接机构允许承载面板相对于多用途复合机动行走系统的上下摆动。
6.根据权利要求1所述的多用途复合机动行走系统,其特征在于,其中,操控第一行走轮系沿第一行走方向运动,并操控第二行走轮系和第三行走轮系沿第二行走方向运动,且第一行走方向逆向于第二行走方向,会使得第二底盘相对于第一底盘移动。
7.根据权利要求2所述的多用途复合机动行走系统,其特征在于,其中,用于连接第一底盘到第二底盘的第一可调节连接结构采用变长度可调结构,从而第一底盘和第二底盘之间可做相对伸缩运动。
8.根据权利要求7所述的多用途复合机动行走系统,其特征在于,所述第一可调节连接结构包括一个多级伸缩机构。
9.根据权利要求8所述的多用途复合机动行走系统,其特征在于,还包括:
10.根据权利要求9所述的多用途复合机动行走系统,其特征在于,其中,第三连接结构包括制动器,用于锁定第二连接结构相对于第一可调节连接结构的旋转。
11.根据权利要求8所述的多用途复合机动行走系统,其特征在于,还包括可拆装的安全支腿总成,所述安全支腿总成包括:
12.根据权利要求8所述的多用途复合机动行走系统,其特征在于,其中,多级伸缩机构还包括用于将伸缩机构锁定在所需长度的锁定机构。
13.根据权利要求7所述的多用途复合机动行走系统,其特征在于,其中,第一可调节连接结构包括剪叉杆件机构。
14.根据权利要求2所述的多用途复合机动行走系统,其特征在于,其中,用于连接第一底盘和第二底盘的第一可调节连接结构是旋转可调整机构,使第一底盘和第二底盘之间相对彼此旋转。
15.一种四轮行走载具,其特征在于,包括:
技术总结
本技术公开了一种多用途复合机动行走系统和四轮行走载具,属于轮系行走系统领域。该多用途复合机动行走系统包括两个或多个通过中间连接结构彼此连接的平行机动行走单元。每个平行机动行走单元包括两个或多个动力或非动力的行走轮系,各行走轮系通过转向机构保持彼此平行。转向机构可以采用齿轮啮合结构、皮带和滑轮结构、链轮和链条结构或刚性杆件结构实现。中间连接结构为刚性结构、线性位移结构、可旋转可调结构或者线性位移及回转位移可调节结构。可调节连接结构使得多个平行机动行走单元在共同承载状态下实现各行走单元之间的相对线位移或相对角位移。
技术研发人员:崔侃,玛格丽特·崔·刘,赛米欧·侃·刘
受保护的技术使用者:崔侃
技术研发日:20220726
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!