一种便于更换支腿的机械螃蟹
本技术涉及机械人,具体为一种便于更换支腿的机械螃蟹。
背景技术:
1、机器人属于现代化高新技术的产物,通过使用电机组装成为机器人可以进行较为危险的探测以及施工作业,现有的较为常见的全地形机器人多为机械螃蟹,采用多组支腿结构可以适用不同的地形,从而多地形的探测,有效地辅助现代化危险作业。
2、较为常见的机械螃蟹由于在进行作业的时候支腿经常容易出现损坏,但是利用螺栓结构进行组合安装,导致不便于进行拆卸,使得拆卸的时候需要花费较长的时间,不便于进行更换。
技术实现思路
1、本实用新型的目的在于提供一种便于更换支腿的机械螃蟹,以解决上述背景技术中机械螃蟹的支腿不便于进行更换的技术问题。
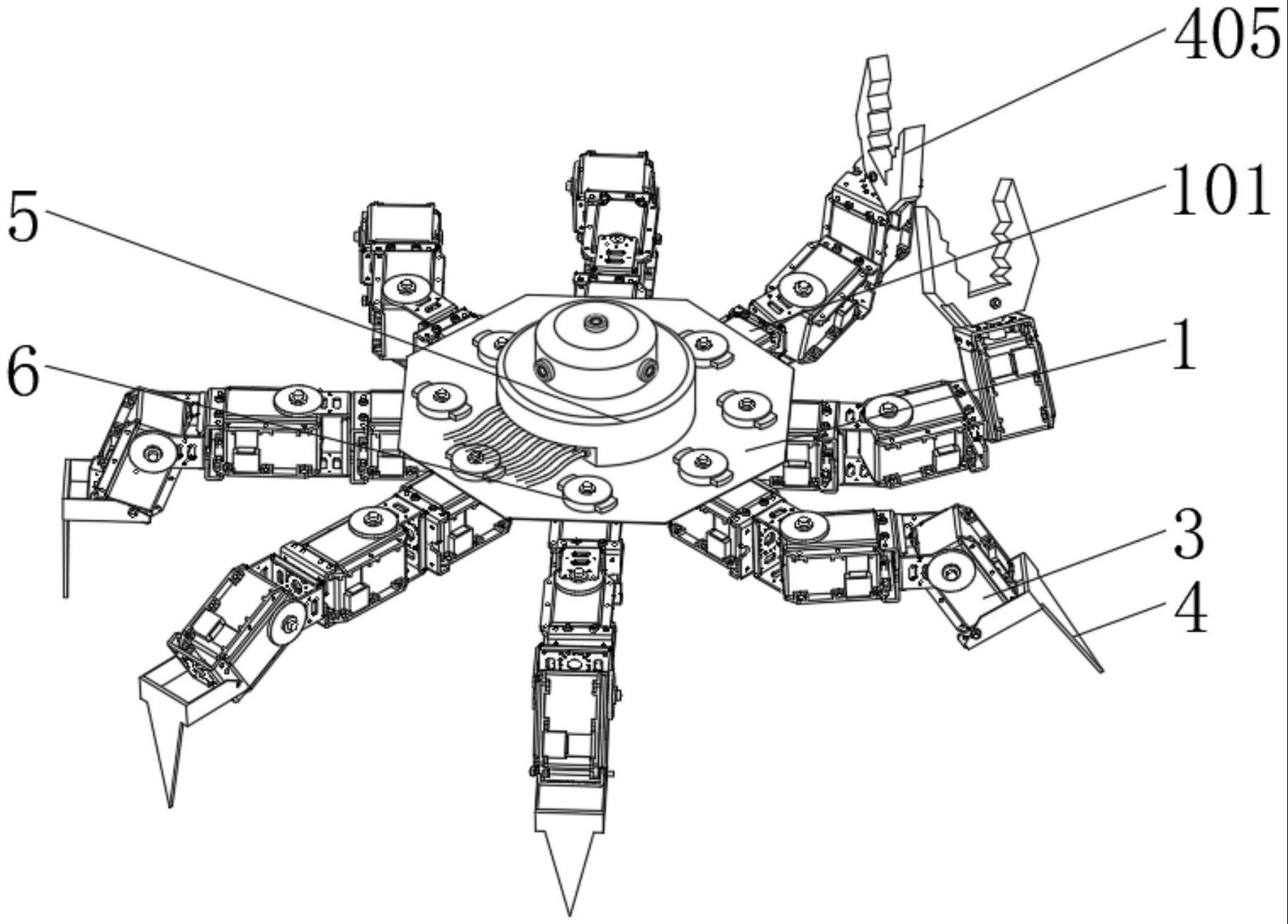
2、为实现上述目的,本实用新型提供如下技术方案:一种便于更换支腿的机械螃蟹,包括承载盘和快拆模组,所述承载盘的顶部设置有八组快拆模组,所述快拆模组用于快速更换支腿;
3、所述快拆模组包括快拆座,所述快拆座的内部设置有两组挤压限位架,所述挤压限位架的正面和背面分布安装有挤压板,所述挤压板的内侧安装有支撑弹簧。
4、优选的,所述承载盘的底部安装有八组支腿电机,支腿电机的顶部设置有嵌合柱,且嵌合柱位于快拆座的内侧,支腿电机的顶部设置有两组限位块,且限位块位于承载盘的底部,支腿电机的内侧安装有调节电机,调节电机的外侧安装有接线盒,支腿电机的外侧安装有安装板,所述承载盘的顶部安装有避障组件,所述避障组件用于监控实现避障,所述支腿电机、所述调节电机均与避障组件电连接。
5、优选的,所述安装板的两侧安装有限位支架,限位支架的顶部和底部安装有侧板,限位支架的正面开设有两组限位槽,限位支架的内侧安装有外爪电机。
6、优选的,所述外爪电机的两侧嵌入安装有旋转轴,外爪电机的底部安装有组合架,外爪电机的外侧安装有安装轴。
7、优选的,所述安装轴的外侧安装有安装框,安装框的底部安装有支撑爪,所述外爪电机的外侧设置有两组辅助爪。
8、优选的,所述避障组件包括控制器,所述控制器的正面安装有若干组数据接口,数据接口的正面安装有连接线,控制器的顶部安装有环境监控器,环境监控器的外侧安装有若干组摄像头,所述环境监控器与控制器电连接。
9、优选的,所述挤压限位架的内侧开设有大组合孔,大组合孔的一侧开设有小限位孔。
10、与现有技术相比,本实用新型的有益效果是:
11、1、本实用新型通过安装有快拆组件,当装置在使用的时候,首先将拆卸组件直接安装在主体承载盘的顶部,保证结构的稳定性,内部的挤压限位架可以通过中部挤压实现调节的效果,挤压限位架的内侧设置有大组合孔与小限位孔,同时利用焊接的方式设置有挤压板,同时内部的支撑弹簧推动两侧挤压限位架外展,挤压将两组大组合孔居中对齐后,将底部的嵌合柱插入内部后,利用支撑弹簧挤压即可利用小限位孔进行限制,并且限位块可以嵌入在承载盘的内侧,能够有效地有效地实现限制的效果,避免在使用的时候出现晃动,利用快拆组件有效地解决了现有的机械螃蟹在使用的时候出现不便于更换的问题。
12、2、本实用新型通过安装有避障组件,现有的装置在使用的时候,通常需要工作人员远程进行控制,但是由于工作人员观察的视角和操作限制,导致机械螃蟹经常会出现撞击的情况,容易造成损坏,通过在承载盘的顶部设置有控制器,利用控制器与环境监控器进行连接,保证装置可以正常通电使用,正面的若干组数据接口通过连接线与各组结构的接线盒进行连接,利用控制器进行驱动控制,顶部的环境监控器利用摄像头对外侧的环境进行检测,合理的计算并且控制支脚结构移动进行避障,利用避障组件有效地解决了现有的机械螃蟹在使用的时候无法进行自主避障的问题。
技术特征:
1.一种便于更换支腿的机械螃蟹,包括承载盘(1)和快拆模组,其特征在于:所述承载盘(1)的顶部设置有八组快拆模组,所述快拆模组用于快速更换支腿;
2.根据权利要求1所述的一种便于更换支腿的机械螃蟹,其特征在于:所述承载盘(1)的底部安装有八组支腿电机(101),支腿电机(101)的顶部设置有嵌合柱(102),且嵌合柱(102)位于快拆座(6)的内侧,支腿电机(101)的顶部设置有两组限位块(103),且限位块(103)位于承载盘(1)的底部,支腿电机(101)的内侧安装有调节电机(104),调节电机(104)的外侧安装有接线盒(105),支腿电机(101)的外侧安装有安装板(201),所述承载盘(1)的顶部安装有避障组件,所述避障组件用于监控实现避障,所述支腿电机(101)、所述调节电机(104)均与避障组件电连接。
3.根据权利要求2所述的一种便于更换支腿的机械螃蟹,其特征在于:所述安装板(201)的两侧安装有限位支架(2),限位支架(2)的顶部和底部安装有侧板(202),限位支架(2)的正面开设有两组限位槽(203),限位支架(2)的内侧安装有外爪电机(3)。
4.根据权利要求3所述的一种便于更换支腿的机械螃蟹,其特征在于:所述外爪电机(3)的两侧嵌入安装有旋转轴(301),外爪电机(3)的底部安装有组合架(302),外爪电机(3)的外侧安装有安装轴(401)。
5.根据权利要求4所述的一种便于更换支腿的机械螃蟹,其特征在于:所述安装轴(401)的外侧安装有安装框(402),安装框(402)的底部安装有支撑爪(4),所述外爪电机(3)的外侧设置有两组辅助爪(405)。
6.根据权利要求2所述的一种便于更换支腿的机械螃蟹,其特征在于:所述避障组件包括控制器(5),所述控制器(5)的正面安装有若干组数据接口(501),数据接口(501)的正面安装有连接线(502),控制器(5)的顶部安装有环境监控器(503),环境监控器(503)的外侧安装有若干组摄像头(504),所述环境监控器(503)与控制器(5)电连接。
7.根据权利要求1所述的一种便于更换支腿的机械螃蟹,其特征在于:所述挤压限位架(601)的内侧开设有大组合孔(602),大组合孔(602)的一侧开设有小限位孔(603)。
技术总结
本技术公开了一种便于更换支腿的机械螃蟹,包括承载盘和快拆模组,所述承载盘的顶部设置有八组快拆模组,所述快拆模组用于快速更换支腿;所述快拆模组包括快拆座,所述快拆座的内部设置有两组挤压限位架,所述挤压限位架的正面和背面分布安装有挤压板,所述挤压板的内侧安装有支撑弹簧。本技术通过安装有快拆组件,利用快拆组件有效地解决了现有的机械螃蟹在使用的时候出现不便于更换的问题。
技术研发人员:胡天文,付祖宇,何圣涵,陈浩洋,蒋林彤,鲁成,黄礼亮
受保护的技术使用者:长江大学
技术研发日:20221128
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!