矿用防爆全地形智能机器人平台的制作方法
本技术属于全地形车,具体涉及矿用防爆全地形智能机器人平台。
背景技术:
1、全地形智能机器人平台具有宽大的轮胎能增加与地面的接触面积,产生更大的摩擦力而且能降低车辆对地面的压强,具有优秀的越野性能,因此在军用和民用领域均具有潜在的应用价值,特别是在一些危险、不方便人力解决的复杂特殊环境,智能机器人平台能够帮助人们远距离探测、侦查、反馈相关环境态势信息。目前应用于矿山井下作业的全地形智能机器人平台结构简单,还没有具备有良好的防爆性能,其核心控制设备的安装结构采用紧固件配合的方式进行固定,这种固定结构不便于拆卸维修,因此针对现有问题,有必要加以改进。
技术实现思路
1、本实用新型针对上述问题,公开了矿用防爆全地形智能机器人平台,解决了现有技术中设备安装结构简单,不便于拆卸维修的问题。
2、具体的技术方案如下:
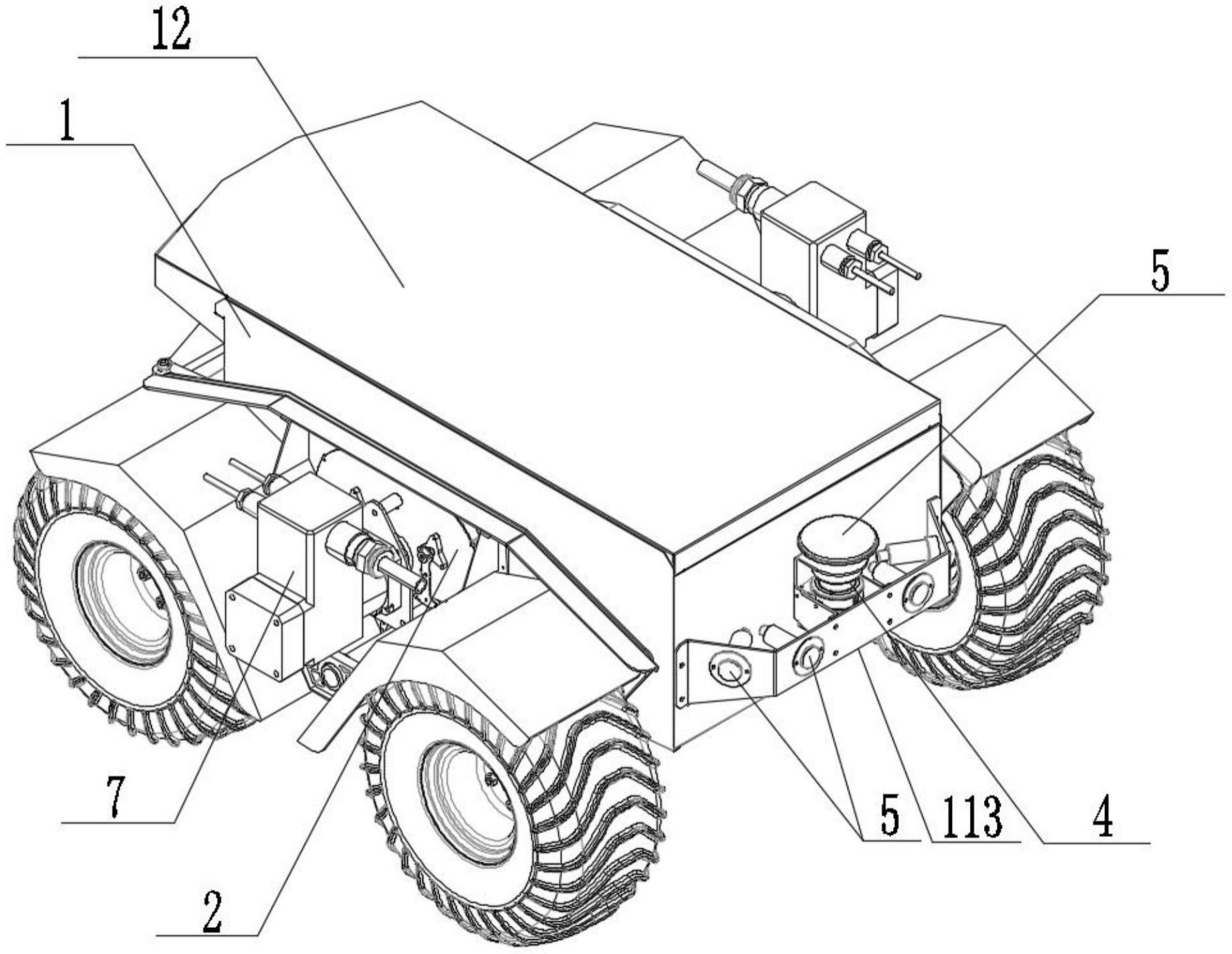
3、矿用防爆全地形智能机器人平台,包括载物平台、驱动桥、全地形轮胎、激光雷达、超声波雷达、rtk天线、隔爆电机、隔爆锂电池以及隔爆控制箱,所述载物平台两侧设置所述驱动桥,两个驱动桥的两端分别设置一个全地形轮胎,且两个驱动桥中部分别设置一个所述隔爆电机并用于驱动全地形轮胎转动;载物平台前端设有安装架,所述安装架上设置所述激光雷达、超声波雷达和rtk天线;所述载物平台包括底座箱和设置于底座箱顶部的平台盖板,所述底座箱内设置所述隔爆锂电池和隔爆控制箱,所述隔爆控制箱四周通过安装在底座箱底端的折叠卡座组件进行定位;
4、所述折叠卡座组件包括底座架、活动架、定位板和折叠支撑架,底座架的截面呈“匚”形结构,底座架靠近隔爆控制箱的一端设有铰接座,所述铰接座上铰接设置活动架的一端,活动架的另一端铰接设置所述定位板,定位板呈l型结构,定位板的一端抵压在活动架一侧表面并对定位板的旋转进行限位,定位板另一端水平按压在隔爆控制箱的一侧顶部并进行定位,所述活动架靠近底座架的一侧设有容置槽,所述容置槽与底座架内侧之间设置所述折叠支撑架,折叠支撑架为倾斜设置,折叠支架一端与底座架两侧内壁铰接,折叠支架另一端与容置槽两侧内壁铰接,实现折叠支撑架对活动架进行支撑定位。
5、进一步的,所述折叠支撑架包括上支杆和下支杆,所述上支杆和下支杆相远离一端分别与容置槽内壁和底座架内壁铰接相连,上支杆和下支杆的相邻一端铰接相连,其中,上支杆靠近下支杆的一端内部设有活动腔,所述活动腔中设有杠杆和弹簧,所述杠杆呈z形结构,杠杆中部与活动腔两侧相铰接,杠杆一端设有按压块,所述按压块贯穿上支杆的上端侧壁,杠杆另一端设有限位杆,所述限位杆贯穿上支杆的下端侧壁,所述弹簧对按压块底部进行支撑,所述上支杆的上端内侧壁上设有定位卡板,所述定位卡板的上端设有与所述限位杆相适配的卡孔,通过定位卡板与上支杆贴合设置并利用限位杆进行限位,实现上支杆与下支杆之间定位。
6、进一步的,所述活动架靠近隔爆控制箱的一侧侧壁上设有减震垫。
7、进一步的,所述底座箱上端横向设置有加强杆。
8、进一步的,所述底座箱底端开设有多个安装槽,每个所述安装槽中分别设置一个所述折叠卡座组件。
9、进一步的,所述折叠卡座组件的数量至少为八个。
10、本实用新型的有益效果体现在:
11、(1)本实用新型中智能机器人平台采用隔爆型结构的电机、控制箱以及锂电池,能够完全适用于矿山井下的恶劣环境,提高智能机器人平台运行的稳定性和安全性,同时智能机器人平台通过激光雷达建立井下地图,利用激光雷达和超声波雷达感知周围环境,保证了机器人安全、智能的执行任务。
12、(2)本实用新型中底座箱内部通过折叠卡座组件对隔爆控制箱进行定位,并且通过下压按压块,使得折叠支撑架进行折叠,实现折叠卡座组件的快速折叠收纳,从而便于对核心设备的快速安装和拆卸。
技术特征:
1.矿用防爆全地形智能机器人平台,其特征在于,包括载物平台(1)、驱动桥(2)、全地形轮胎(3)、激光雷达(4)、超声波雷达(5)、rtk天线(6)、隔爆电机(7)、隔爆锂电池(8)以及隔爆控制箱(9),所述载物平台(1)两侧设置所述驱动桥(2),两个驱动桥(2)的两端分别设置一个全地形轮胎(3),且两个驱动桥(2)中部分别设置一个所述隔爆电机(7)并用于驱动全地形轮胎(3)转动;载物平台(1)前端设有安装架(113),所述安装架(113)上设置所述激光雷达(4)、超声波雷达(5)和rtk天线(6);所述载物平台(1)包括底座箱(11)和设置于底座箱(11)顶部的平台盖板(12),所述底座箱(11)内设置所述隔爆锂电池(8)和隔爆控制箱(9),所述隔爆控制箱(9)四周通过安装在底座箱(11)底端的折叠卡座组件(10)进行定位;
2.如权利要求1所述的矿用防爆全地形智能机器人平台,其特征在于,所述折叠支撑架(104)包括上支杆(1041)和下支杆(1042),所述上支杆(1041)和下支杆(1042)相远离一端分别与容置槽(1021)内壁和底座架(101)内壁铰接相连,上支杆(1041)和下支杆(1042)的相邻一端铰接相连,其中,上支杆(1041)靠近下支杆(1042)的一端内部设有活动腔(1043),所述活动腔(1043)中设有杠杆(1044)和弹簧(1045),所述杠杆(1044)呈z形结构,杠杆(1044)中部与活动腔(1043)两侧相铰接,杠杆(1044)一端设有按压块(1046),所述按压块(1046)贯穿上支杆(1041)的上端侧壁,杠杆(1044)另一端设有限位杆(1047),所述限位杆(1047)贯穿上支杆(1041)的下端侧壁,所述弹簧(1045)对按压块(1046)底部进行支撑,所述上支杆(1041)的上端内侧壁上设有定位卡板(1048),所述定位卡板(1048)的上端设有与所述限位杆(1047)相适配的卡孔(1049),通过定位卡板(1048)与上支杆(1041)贴合设置并利用限位杆(1047)进行限位,实现上支杆(1041)与下支杆(1042)之间定位。
3.如权利要求1所述的矿用防爆全地形智能机器人平台,其特征在于,所述活动架(102)靠近隔爆控制箱(9)的一侧侧壁上设有减震垫(1022)。
4.如权利要求1所述的矿用防爆全地形智能机器人平台,其特征在于,所述底座箱(11)上端横向设置有加强杆(112)。
5.如权利要求4所述的矿用防爆全地形智能机器人平台,其特征在于,所述底座箱(11)底端开设有多个安装槽(111),每个所述安装槽(111)中分别设置一个所述折叠卡座组件(10)。
6.如权利要求5所述的矿用防爆全地形智能机器人平台,其特征在于,所述折叠卡座组件(10)的数量至少为八个。
技术总结
本技术涉及矿用防爆全地形智能机器人平台,包括载物平台、驱动桥、全地形轮胎、激光雷达、超声波雷达、RTK天线、隔爆电机、隔爆锂电池以及隔爆控制箱,载物平台两侧设置驱动桥,两个驱动桥两端分别设置一个全地形轮胎,且两个驱动桥中部分别设置一个隔爆电机并用于驱动全地形轮胎转动;载物平台前端设有安装架,安装架上设置激光雷达、超声波雷达和RTK天线;载物平台包括底座箱和平台盖板,底座箱内设置隔爆锂电池和隔爆控制箱,隔爆控制箱四周通过安装在底座箱底端的折叠卡座组件进行定位,通过折叠卡座组件的快速折叠收纳,从而便于对核心设备的快速安装和拆卸。
技术研发人员:孙长春,史浩,刘云峰,刘大源,曹衡,刘启龙,马飞,张海阳
受保护的技术使用者:北京华电力拓能源科技有限公司
技术研发日:20221130
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!