一种爬壁关节腿及爬壁机器人的制作方法
本技术涉及爬壁机器人,尤其是一种爬壁关节腿及爬壁机器人。
背景技术:
1、高层建筑玻璃幕墙的保温,降噪,美观,舒适等性能不断提高,多种多样的玻璃幕墙油然而生,这也促使玻璃幕墙的清洁环境也越来越复杂,不同造型之间的接缝、高度差等,使得单纯的平面清洁机器人无法满足高层建筑的连续清洗作业,对能自主跨障的清洁机器人的需求也越来越高。现有方案中,如中国专利cn202120054737.7提供了一种可跨障机器人及行进组件,能轻松跨越5厘米以内的障碍,实现跨障功能,可进行连续的爬壁清洁作业。主要缺陷在于:行走结构过于较复杂,导致机器人整机重量太重;在爬壁跨障过程中,受到行走组件结构的限制和整机倾覆力矩的影响,无法实现较高的跨障高度,无法满足目前所有窗框高度的跨障要求,且容易发生跌落,针对上述缺陷,提出了本申请。
技术实现思路
1、本实用新型的目的是提供一种爬壁关节腿及爬壁机器人,以较为简单的结构能够稳定的吸附在幕墙表面,能最高限度的提高机身的高度,具有较好的跨障性能。
2、为解决上述问题,本实用新型提供一种爬壁关节腿,包括抬臂舵机,所述抬臂舵机通过舵机连接臂与关节舵机连接,所述关节舵机与关节支撑架连接,通过所述抬臂舵机和关节舵机实现舵机连接臂和所述关节支撑架的上下摆动,所述关节支撑架上安装有行走组件,所述行走组件包括吸盘组件和驱动轮组件,所述驱动轮组件包括旋转组件和滚轮组件,所述滚轮组件用于实现行走驱动,所述旋转组件用于驱动所述滚轮组件方向调整。
3、根据本实用新型一实施例,所述滚轮组件包括电机安装架、滚轮和轮毂电机,所述滚轮和轮毂电机均安装在所述电机安装架上,所述轮毂电机与所述滚轮连接。
4、根据本实用新型一实施例,所述行走组件还包括行走支架,所述行走支架与所述关节支撑架连接,所述滚轮组件和所述吸盘组件均安装在所述行走支架上。
5、根据本实用新型一实施例,所述旋转组件包括旋转舵机,所述旋转舵机与所述电机安装架连接。
6、根据本实用新型一实施例,所述旋转组件还包括齿轮组件,所述旋转舵机通过所述齿轮组件与所述电机安装架连接。
7、根据本实用新型一实施例,所述旋转舵机和齿轮组件均安装在所述关节支撑架上。
8、根据本实用新型一实施例,所述吸盘组件至少设置两组。
9、根据本实用新型一实施例,所述吸盘组件包括吸盘安装架和真空吸盘,所述吸盘安装架安装在所述行走支架上。
10、根据本实用新型一实施例,所述行走支架与所述吸盘安装架之间设有高度调整结构,用于实现调整所述真空吸盘与所述行走支架之间的高度差,进而对所述滚轮的离地高度实现调整。
11、一种爬壁机器人,所述爬壁机器人上设有若干个上述的爬壁关节腿。
12、本实用新型的有益效果是,通过设置抬臂舵机和关节舵机,通过简单且成本较低的结构实现控制关节腿的上下摆动,多个自由度的关节臂,最大限度的增加抬臂的高度,有效增加了跨越障碍的高度,提高了关节腿运动的灵活性,适用于复杂条件下的幕墙。设置了高度可调的吸盘安装架,使滚轮的离地间隙可根据具体工作情况进行便捷调节,保证真空吸盘工作的有效性,避免掉落问题。
技术特征:
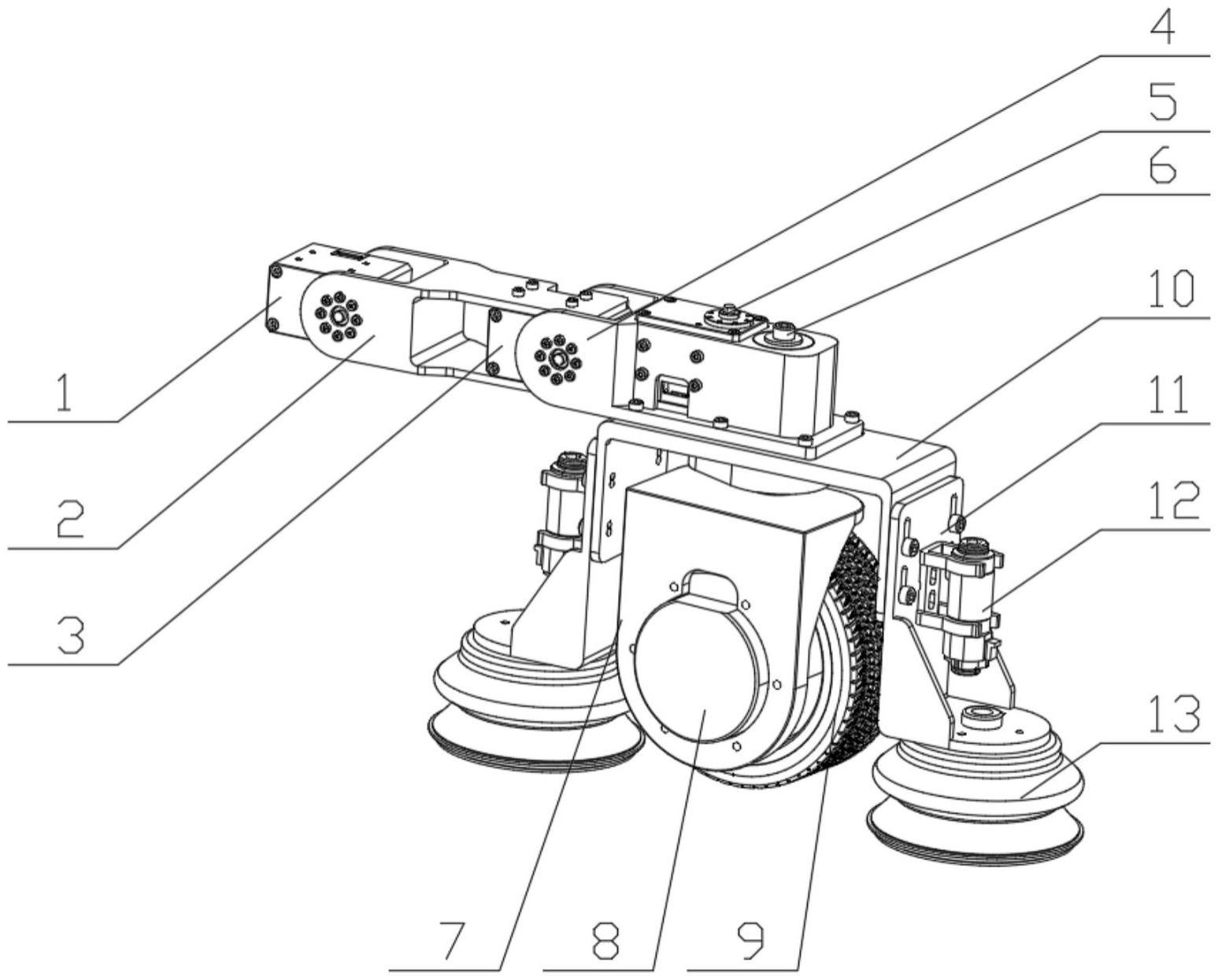
1.一种爬壁关节腿,其特征在于:包括抬臂舵机(1),所述抬臂舵机(1)通过舵机连接臂(2)与关节舵机(3)连接,所述关节舵机(3)与关节支撑架(4)连接,通过所述抬臂舵机(1)和关节舵机(3)实现舵机连接臂(2)和所述关节支撑架(4)的上下摆动,所述关节支撑架(4)上安装有行走组件,所述行走组件包括吸盘组件和驱动轮组件,所述驱动轮组件包括旋转组件和滚轮组件,所述滚轮组件用于实现行走驱动,所述旋转组件用于驱动所述滚轮组件方向调整。
2.根据权利要求1所述的一种爬壁关节腿,其特征在于:所述滚轮组件包括电机安装架(7)、滚轮(9)和轮毂电机(8),所述滚轮(9)和轮毂电机(8)均安装在所述电机安装架(7)上,所述轮毂电机(8)与所述滚轮(9)连接。
3.根据权利要求2所述的一种爬壁关节腿,其特征在于:所述行走组件还包括行走支架(10),所述行走支架(10)与所述关节支撑架(4)连接,所述滚轮组件和所述吸盘组件均安装在所述行走支架(10)上。
4.根据权利要求3所述的一种爬壁关节腿,其特征在于:所述旋转组件包括旋转舵机(5),所述旋转舵机(5)与所述电机安装架(7)连接。
5.根据权利要求4所述的一种爬壁关节腿,其特征在于:所述旋转组件还包括齿轮组件(6),所述旋转舵机(5)通过所述齿轮组件(6)与所述电机安装架(7)连接。
6.根据权利要求5所述的一种爬壁关节腿,其特征在于:所述旋转舵机(5)和齿轮组件(6)均安装在所述关节支撑架(4)上。
7.根据权利要求3至6中任意一项所述的一种爬壁关节腿,其特征在于:所述吸盘组件至少设置两组。
8.根据权利要求7所述的一种爬壁关节腿,其特征在于:所述吸盘组件包括吸盘安装架(11)和真空吸盘(13),所述吸盘安装架(11)安装在所述行走支架(10)上。
9.根据权利要求8所述的一种爬壁关节腿,其特征在于:所述行走支架(10)与所述吸盘安装架(11)之间设有高度调整结构,用于实现调整所述真空吸盘(13)与所述行走支架(10)之间的高度差,进而对所述滚轮(9)的离地高度实现调整。
10.一种爬壁机器人,其特征在于:所述爬壁机器人上设有若干个权利要求1-9中任意一项所述的爬壁关节腿。
技术总结
本技术提供一种爬壁关节腿及爬壁机器人,涉及爬壁机器人技术领域,爬壁关节腿包括抬臂舵机,抬臂舵机通过舵机连接臂与关节舵机连接,关节舵机与关节支撑架连接,关节支撑架上安装有行走组件,行走组件包括吸盘组件和驱动轮组件,驱动轮组件包括旋转组件和滚轮组件。通过设置抬臂舵机和关节舵机,通过简单且成本较低的结构实现控制关节腿的上下摆动,多个自由度的关节臂,最大限度的增加抬臂的高度,有效增加了跨越障碍的高度,提高了关节腿运动的灵活性,适用于复杂条件下的幕墙。
技术研发人员:姚冬暐,迟明
受保护的技术使用者:无锡轻捷智能科技有限公司
技术研发日:20221202
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!