一种转向机构及四轮驱动机器人
本技术涉及机器人底盘转向,具体而言,涉及一种转向机构及四轮驱动机器人。
背景技术:
1、机器人的应用越来越广泛,几乎渗透所有领域,已应用与商场导购、物品转移、家居服务、展厅保安和大面积清扫等多个服务领域。移动机器人是指地面可移动机器人,是继操作手和步行机之后机器人技术的一个新的研究目标,也是进一步扩展机器人应用领域的重要研究方向。
2、公开号为cn210634628u的中国实用新型专利公开了一种机器人底盘转向结构,包括底盘,底盘后端设置有相互平行对齐的两个后驱动轮,所述后驱动轮分别连接有固定于底盘上的减速电机,所述底盘的前端设置有与后驱动轮轴线平形的丝杠,丝杠中部连接有驱动丝杠转动的驱动装置,丝杠两端均穿设有与丝杠相配合的丝杠螺母,丝杠下方设置有固定于底盘上的滑轨,所述丝杠螺母连接有于滑轨上滑动的滑动装置,滑动装置连接有转向机构,转向机构上固定有前驱动轮;采用蜗轮和蜗杆传动,可以实现较大的传动比。
3、然而,上述的四轮驱动机器人采用后轮组驱动和前轮组转向的方式,在利用前轮组进行转向的同时,后轮组向前驱动,从而导致转弯半径大,所需的转向空间大,难以在狭窄路段进行转弯掉头。
技术实现思路
1、基于此,为了解决上述现有的四轮驱动机器人后轮组向前驱动,导致转弯半径大,所需的转向空间大的问题,本实用新型提供了一种转向机构及四轮驱动机器人,其具体技术方案如下:
2、一种转向机构,包括:
3、底座部件,包括底架;
4、传动部件,包括设置在底架上的转向动力组件;
5、轮部件,包括分别设置在所述底架前后端的前轮体组件和后轮体组件,所述前轮体组件设有铰链连接的前轮组,所述后轮体组件设有铰链连接的后轮组;
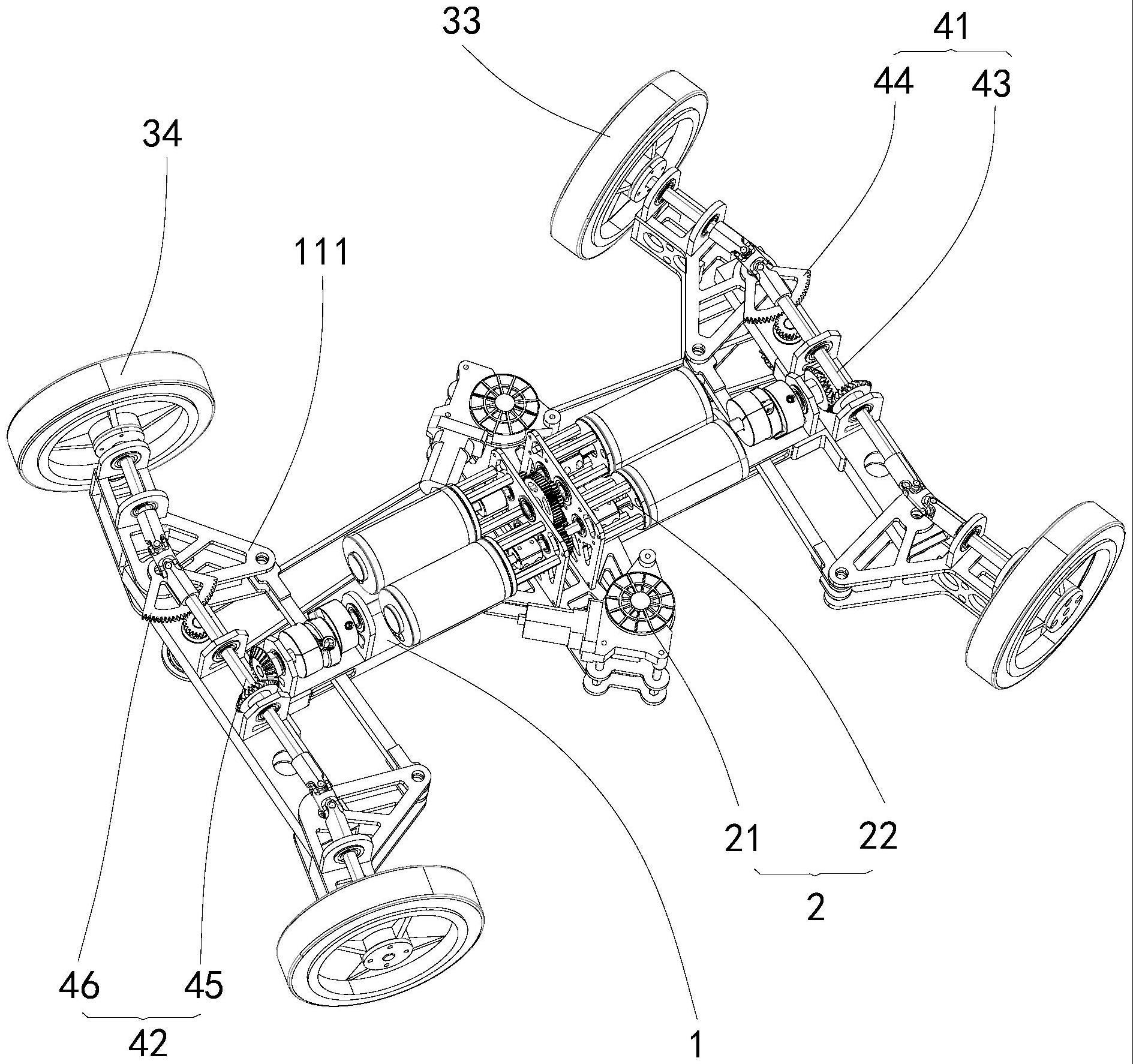
6、转向部件,包括前转向组件和后转向组件,所述前转向组件包括前驱动件和受前驱动件驱动的前齿轮组,所述前齿轮组设置在所述前轮组的铰链连接处;所述后转向组件包括后驱动件和受后驱动件驱动的后齿轮组,所述后齿轮组设置在所述后轮组的铰链连接处,通过传转向动力组件驱动前驱动件和后驱动件进而控制所述前轮体组件和后轮体组件进行转向动作。
7、通过采用前驱动件驱动前齿轮组控制前轮组进行转向,以及后驱动件驱动的后齿轮组控制后轮组进行转向,实现前轮组和后轮组进行同步转向的效果,从而减少四轮驱动机器人的转弯半径,进而减小所需的转向空间,便于四轮驱动机器人在狭窄路段进行转弯掉头。
8、进一步地,所述前轮组包括两组的前铰接座和可相对于前铰接座转动的前驱动轮;所述传动部件包括轮驱动组件;所述底架设有前铰接部,所述前铰接座与所述前铰接部铰链连接,所述轮驱动组件与前驱动轮传动连接。
9、进一步地,所述前齿轮组包括第一齿轮、第二齿轮和转向传动轴,所述第一齿轮设置在所述底架上,所述第二齿轮与所述前铰接座固定连接,所述转向传动轴与所述前驱动件轮毂连接。
10、进一步地,所述第二齿轮为扇形齿轮,扇形齿轮的角度为弧度范围为50°~90°。
11、进一步地,所述前轮体组件包括联动杆,所述联动杆与前铰接座、底架组成平行四边形连杆组,进而实现两侧的轮体组件同步转向。
12、进一步地,所述轮驱动组件包括驱动电机组和第一锥齿轮、与第一锥齿轮啮合传动的第二锥齿轮、驱动传动轴;所述驱动电机组包括传动杆;所述第一锥齿轮与传动杆轮毂连接,所述第二锥齿轮与驱动传动轴轮毂连接;所述驱动传动轴的两端设有传动臂,所述传动臂与所述前驱动轮轮毂连接。
13、进一步地,所述驱动电机组还包括传动齿轮、减速齿轮组以及至少两个驱动电机;所述传动齿轮与传动杆轮毂连接;所述两个驱动电机通过减速齿轮组与传动齿轮啮合传动实现传动连接。
14、进一步地,所述底架为工字型架体;所述转向动力组件包括减速电机组、传动链轮和转向链轮,所述传动链轮与减速电机组轮毂连接,所述转向链轮与转向传动轴轮毂连接;所述减速电机组设置在包括工字型架体的中间梁上,通过传动链轮带动转向链轮转动,从而带动前轮组进行转向。
15、进一步地,所述减速电机组包括通过链轮链条结构同步传动的两个减速电机。
16、另一方面,一种四轮驱动机器人,包含上述任意一项所述的转向机构。
技术特征:
1.一种转向机构,其特征在于,包括:
2.根据权利要求1所述的一种转向机构,其特征在于,所述前轮组包括两组的前铰接座和可相对于前铰接座转动的前驱动轮;
3.根据权利要求2所述的一种转向机构,其特征在于,所述前齿轮组包括第一齿轮、第二齿轮和转向传动轴,所述第一齿轮设置在所述底架上,所述第二齿轮与所述前铰接座固定连接,所述转向传动轴与所述前驱动件轮毂连接。
4.根据权利要求3所述的一种转向机构,其特征在于,所述第二齿轮为扇形齿轮,扇形齿轮的角度为弧度范围为50°~90°。
5.根据权利要求2所述的一种转向机构,其特征在于,所述前轮体组件包括联动杆,所述联动杆与前铰接座、底架组成平行四边形连杆组,进而实现两侧的轮体组件同步转向。
6.根据权利要求2所述的一种转向机构,其特征在于,所述轮驱动组件包括驱动电机组和第一锥齿轮、与第一锥齿轮啮合传动的第二锥齿轮、驱动传动轴;
7.根据权利要求6所述的一种转向机构,其特征在于,所述驱动电机组还包括传动齿轮、减速齿轮组以及至少两个驱动电机;
8.根据权利要求3所述的一种转向机构,其特征在于,所述底架为工字型架体;
9.根据权利要求8所述的一种转向机构,其特征在于,所述减速电机组包括通过链轮链条结构同步传动的两个减速电机。
10.一种四轮驱动机器人,其特征在于,包含权利要求1-9任意一项所述的转向机构。
技术总结
本技术提供了一种转向机构及四轮驱动机器人,其中转向机构包括底座部件、传动部件、轮部件和转向部件,传动部件包括设置在底座部件的底架上的转向动力组件;轮部件包括分别设置在底架前后端的前轮组和后轮组;转向部件包括前转向组件和后转向组件,前转向组件包括前驱动件和受前驱动件驱动的前齿轮组;后转向组件包括后驱动件和受后驱动件驱动的后齿轮组。通过采用前驱动件驱动前齿轮组控制前轮组进行转向,以及后驱动件驱动的后齿轮组控制后轮组进行转向,实现前轮组和后轮组进行同步转向的效果,从而减少四轮驱动机器人的转弯半径,进而减小所需的转向空间,便于四轮驱动机器人在狭窄路段进行转弯掉头。
技术研发人员:王志锋,范金威,童俊,郑焕楠,王培洲,严浩涛,吴泽涛,操健,文吉昌,赖刘生,陈友鹏
受保护的技术使用者:佛山科学技术学院
技术研发日:20221209
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!