一种地面武装侦察机器人、侦察设备
本技术涉及武装侦察设备,具体涉及一种地面武装侦察机器人、侦察设备。
背景技术:
1、战机稍纵即逝,能更先一步发现敌人或者侦查到敌人位置战略目标等都会对局势产生至关重要的影响,当面对复杂,危险,人员难以进入的战场环境时,就催生出来了地面武装侦查机器人,这种装备是用来替代军人完成特殊军事任务的无人车辆,它具备了全地形快速型侦查作战的特点,可以充分减少在实战中侦查人员的伤亡,能高效率提高我军作战能力。
2、在如今的各类别战争之中,无人化武器,智能化武器和高精度武器的发展趋势十分明朗,而且也催生出很多危险的包含核武器,生化武器等对人类可产生致命影响的高技术武器以及各类别复杂环境,当人亲身面对这些复杂环境时,可能会由于种种因素不能完成目标。
3、现有技术中的地面武装侦察机器人在使用的过程汇总,主要以多地形复合侦察任务为主,但是现有的地面武装侦察机器人通过复杂地形时,不能快速通过各类型地形,且适应作业环境能力较差。
技术实现思路
1、因此,本实用新型要解决的技术问题在于克服现有技术中的现有的地面武装侦察机器人通过复杂地形时,不能快速通过各类型地形,且适应作业环境能力较差的问题,从而提供一种地面武装侦察机器人、侦察设备。
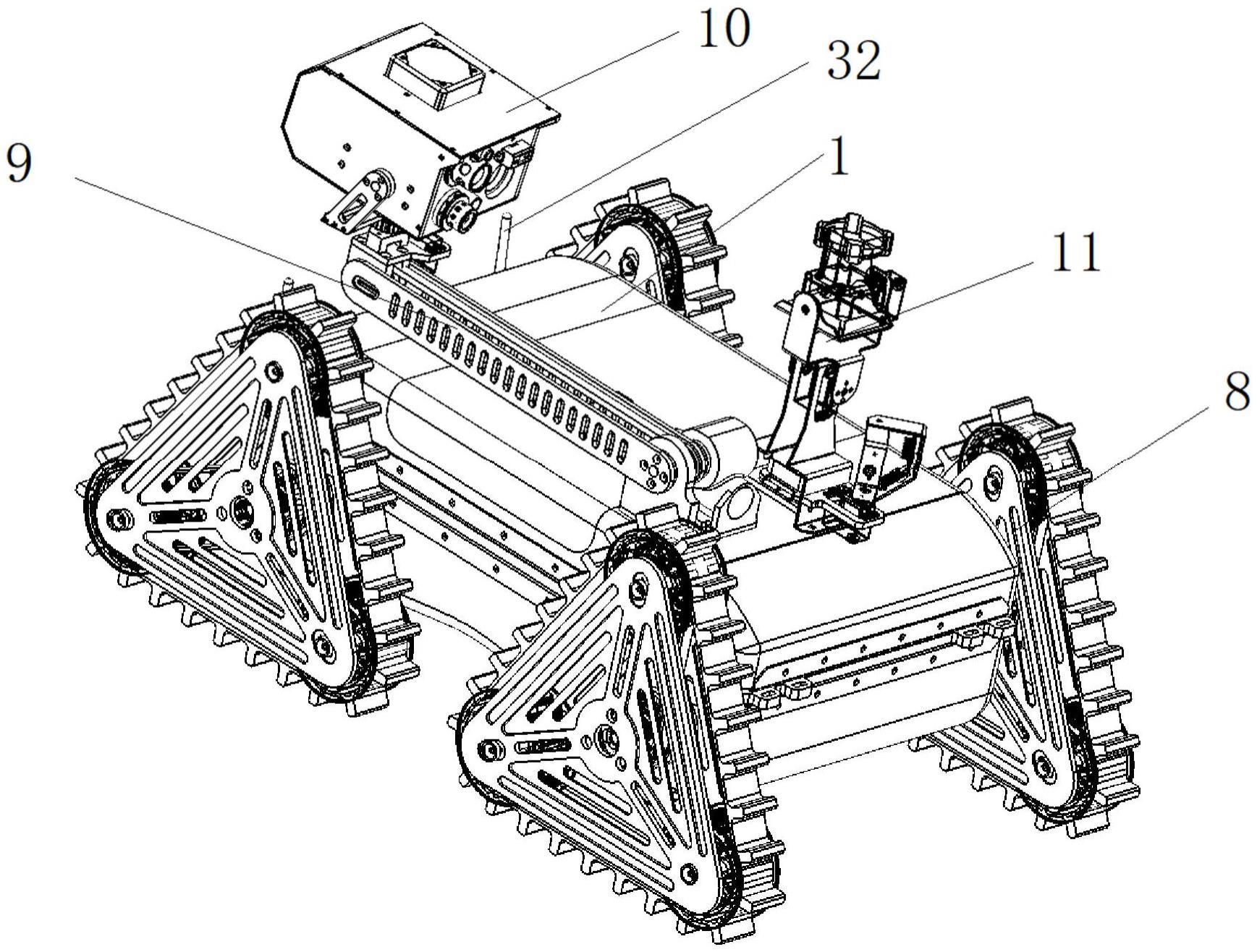
2、为了解决上述技术问题,本实用新型提供了一种地面武装侦察机器人,包括:箱体,所述箱体内设有发电组件和驱动组件;传动装置,设于所述箱体内,且与所述驱动组件连接,所述传动装置包括履带驱动机构和履带传动机构、以及皮带,所述履带驱动机构与所述驱动组件连接,所述履带驱动机构通过皮带与所述履带传动机构连接;三角履带式移动结构,设于所述箱体的外壁上,且所述三角履带式移动结构与所述履带传动机构连接,所述三角履带式移动结构的截面呈三角形;云台臂,设于所述箱体上,且在所述云台臂上设有侦察云台;稳定器,设于所述箱体上。
3、进一步地,所述履带驱动机构包括:第一传动轴,具有两个,两个所述第一传动轴的一端与所述驱动组件连接,两个所述第一传动轴的另一端通过皮带与所述履带传动机构连接;第二传动轴,具有两个,两个所述第二传动轴设于所述第一传动轴的两侧,且所述第二传动轴与所述履带传动机构连接。
4、进一步地,所述履带传动机构包括:第一齿轮箱,具有两个,所述第一齿轮箱通过皮带与所述第一传动轴连接,所述第一齿轮箱与第二传动轴连接;第二齿轮箱,具有两个,所述第二齿轮箱通过皮带与所述第一传动轴连接;所述第一齿轮箱和第二齿轮箱均具有两个,且所述第一齿轮箱和第二齿轮箱沿所述箱体的对角线设于所述箱体内。
5、进一步地,所述第一齿轮箱包括:第一传动齿轮组,一端与皮带传动轮连接,所述第一传动齿轮组通过皮带传动轮和皮带,与第一传动轴连接,且在所述第一传动齿轮组的另一端与梅花键连接,所述三角履带式移动结构设于所述梅花键上;第二传动齿轮组,与所述第二传动轴连接。
6、进一步地,所述第二齿轮箱包括第三传动齿轮组,所述第三传动齿轮组的一端与皮带传动轮连接,另一端与梅花键连接,所述三角履带式移动结构设于所述梅花键上。
7、进一步地,所述第一齿轮箱和第二齿轮箱上均设有联轴器,第一齿轮箱和第二齿轮箱通过联轴器连接。
8、进一步地,所述三角履带式移动结构包括:驱动轮,所述驱动轮与所述梅花键连接;带轮,具有三个,三个所述带轮设于固定板上,且绕所述驱动轮设置,且一所述带轮与所述驱动轮通过皮带连接;履带,设于三个所述带轮上。
9、进一步地,还包括中控装置、工业计算机、视频编码器、板载电源、板载电源模组、以及电控装置,均设于所述箱体内,且所述中控装置、视频编码器、板载电源、板载电源模组、以及电控装置均与所述工业计算机电连接。
10、进一步地,还包括天线,所述天线设于所述箱体上。
11、本发明还提供了一种地面武装侦察设备,包括所述的地面武装侦察机器人。
12、本实用新型技术方案,具有如下优点:
13、1.本实用新型提供的地面武装侦察机器人,包括:箱体,所述箱体内设有发电组件和驱动组件;传动装置,设于所述箱体内,且与所述驱动组件连接,所述传动装置包括履带驱动机构和履带传动机构、以及皮带,所述履带驱动机构与所述驱动组件连接,所述履带驱动机构通过皮带与所述履带传动机构连接;三角履带式移动结构,设于所述箱体的外壁上,且所述三角履带式移动结构与所述履带传动机构连接,所述三角履带式移动结构的截面呈三角形;云台臂,设于所述箱体上,且在所述云台臂上设有侦察云台;稳定器,设于所述箱体上。
14、通过在箱体的内部设置发电组件和驱动组件,即利用发电组件为驱动组件提供了动力来源,实现了地面武装侦察机器人的使用。驱动组件与传动装置连接,该传动装置内的履带驱动机构与所述驱动组件连接,履带驱动机构通过皮带与所述履带传动机构连接,同时,该履带传动机构与三角履带式移动结构连接,即通过驱动组件的驱动,带动履带驱动机构和履带传动机构动作,进而带动三角履带式移动结构移动,从而实现了该地面侦察机器人的行走功能。其中,所述三角履带式移动结构的截面呈三角形,通过将该三角履带式移动结构设置为截面呈三角形的形状,从而便于该地面侦察机器人在复杂地形上的移动,同时快速通过各类型地形。并且,在箱体上设有云台臂和稳定器,在云台臂上设有侦察云台,可以在侦察云台和稳定器上设置摄像机,从而对周围地形进行勘探,提高了该地面侦察机器人的作业环境适应能力。
15、该地面武装侦察机器人集图像侦察,信号接收与发送,位置移动为一体,同时具有良好的稳定性。
16、该地面武装侦察机器人的底盘箱体采用ly12硬质的铝合金材料,其具有轻质量高强度等优点来的组合箱体设计,内部放置金属丝可以对电磁屏蔽。并采用三角履带式移动结构作为移动系统,更好的适应近代各种车辆对高通过性与高机动性等苛刻性能的要求,融合了轮式与履带机构的优点,有效地发挥良好的地形通过性。
17、2.本实用新型提供的地面武装侦察机器人,所述第一齿轮箱包括第一传动齿轮组和第二传动齿轮组;其中,所述第一传动齿轮组的一端与皮带传动轮连接,所述第一传动齿轮组通过皮带传动轮和皮带,与第一传动轴连接,且在所述第一传动齿轮组的另一端与梅花键连接,所述三角履带式移动结构设于所述梅花键上;第二传动齿轮组,与所述第二传动轴连接。从而通过第一传动轴带动第一齿轮箱转动,进而带动三角履带式移动结构转动。
18、3.本实用新型提供的地面武装侦察机器人,所述第一齿轮箱和第二齿轮箱上均设有联轴器,第一齿轮箱和第二齿轮箱通过联轴器连接。联轴器连接第三传动齿轮组与梅花键,在传递运动和动力过程中一同回转,起到了在正常情况下不脱开作用。有时也作为一种安全装置用来防止被联接机件承受过大的载荷,起到过载保护的作用。
19、提供
技术实现要素:
部分是为了以简化的形式来介绍对概念的选择,它们在下文的具体实施方式中将被进一步描述。发明内容部分无意标识本公开的重要特征或必要特征,也无意限制本公开的范围。
技术特征:
1.一种地面武装侦察机器人,其特征在于,包括:
2.根据权利要求1所述的地面武装侦察机器人,其特征在于,履带驱动机构(5)包括:
3.根据权利要求2所述的地面武装侦察机器人,其特征在于,履带(25)传动机构包括:
4.根据权利要求3所述的地面武装侦察机器人,其特征在于,第一齿轮箱(14)包括:
5.根据权利要求4所述的地面武装侦察机器人,其特征在于,第二齿轮箱(15)包括第三传动齿轮组(20),第三传动齿轮组(20)的一端与皮带传动轮(17)连接,另一端与梅花键(18)连接,三角履带式移动结构(8)设于梅花键(18)上。
6.根据权利要求3-5中任一项所述的地面武装侦察机器人,其特征在于,第一齿轮箱(14)和第二齿轮箱(15)上均设有联轴器(21),第一齿轮箱(14)和第二齿轮箱(15)通过联轴器(21)连接。
7.根据权利要求6所述的地面武装侦察机器人,其特征在于,三角履带式移动结构(8)包括:
8.根据权利要求7所述的地面武装侦察机器人,其特征在于,还包括中控装置(26)、工业计算机(27)、视频编码器(28)、板载电源(29)、板载电源模组(30)、以及电控装置,均设于箱体(1)内,且中控装置(26)、视频编码器(28)、板载电源(29)、板载电源模组(30)、以及电控装置均与工业计算机(27)电连接。
9.根据权利要求1所述的地面武装侦察机器人,其特征在于,还包括天线,天线(32)设于箱体(1)上。
10.一种地面武装侦察设备,其特征在于,包括权利要求1-9中任一项所述的地面武装侦察机器人。
技术总结
本技术涉及武装侦察设备技术领域,具体涉及一种地面武装侦察机器人、侦察设备;地面武装侦察机器人,包括:箱体,所述箱体内设有发电组件和驱动组件;传动装置,设于所述箱体内,且与所述驱动组件连接,所述传动装置包括履带驱动机构和履带传动机构、以及皮带,所述履带驱动机构与所述驱动组件连接,所述履带驱动机构通过皮带与所述履带传动机构连接;三角履带式移动结构,设于所述箱体的外壁上,且所述三角履带式移动结构与所述履带传动机构连接,所述三角履带式移动结构的截面呈三角形;通过将该三角履带式移动结构设置为截面呈三角形的形状,从而便于该地面侦察机器人在复杂地形上的移动,同时快速通过各类型地形。
技术研发人员:李政泽,郭健,杨卓,李佑辰,沈志峰
受保护的技术使用者:哈尔滨工程大学
技术研发日:20221214
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!