一种用于全向移动机器人底盘的舵轮装置
本发明涉及舵轮,具体涉及一种用于全向移动机器人底盘的舵轮装置。
背景技术:
1、舵轮是指集成了驱动电机、转向电机、减速机等一体化的机械结构。随着机器人的不断发展,舵轮被越来越多应用到移动机器人上面,以舵轮为基础的全向移动机器人底盘,拥有高速度,高加速度,全向移动的能力。
2、全向移动机器人底盘首先要能够实现全方位的移动,以保证机器人的灵活性;其次要根据不同情况对最高速度、最大加减速度、跑动精度等参数进行选择。在底盘轮系的选择上,传统正交的全向轮、麦克纳姆轮虽然可以满足全向移动,但在全向移动时,其所有轮子的转动方向无法时刻都与前进方向一致,且其上布置的小滚子与地面的接触面积较小使得摩擦力不足,传动效率较低,导致这两种轮子的最大加速度都较小。相比上述两种传统的全向轮,舵轮不仅能满足机器人底盘全向移动还拥有更高的速度和加速度,在机器人比赛中表现卓越。
3、传统舵轮轮系通常采用舵电机外置,轮电机上置的布置模式,这种布置模式的好处是整体结构十分紧凑,便于整体封装。但是,传统舵轮轮系还存在以下不足:
4、1、结构复杂,在竖直方向上占用空间较大,而且所需的加工件较多,加工成本高且对加工精度的要求较高。
5、2、传统舵轮轮系的车轮驱动方式为轮电机加齿轮组传动,传动过程中会存在虚位。
6、3、轮系绕线情况严重,由于轮电机上置的布置方式,随着机器人位置的移动,其相当于轮电机始终在绕着轮系中心做旋转运动,这会导致轮电机的三相线在转动多圈后发生明显的缠绕现象。若不及时处理,甚至可能会出现卡死轮子的情况。
技术实现思路
1、本发明的目的在于克服上述存在的问题,提供一种用于全向移动机器人底盘的舵轮装置,该舵轮装置结构简单,在竖直方向上占用空间较小,且采用无刷电机直接驱动车轮转动,避免传动过程中存在虚位的情况发生,在舵向转动时,可以避免三相线发生缠绕现象。
2、本发明的目的通过以下技术方案实现:
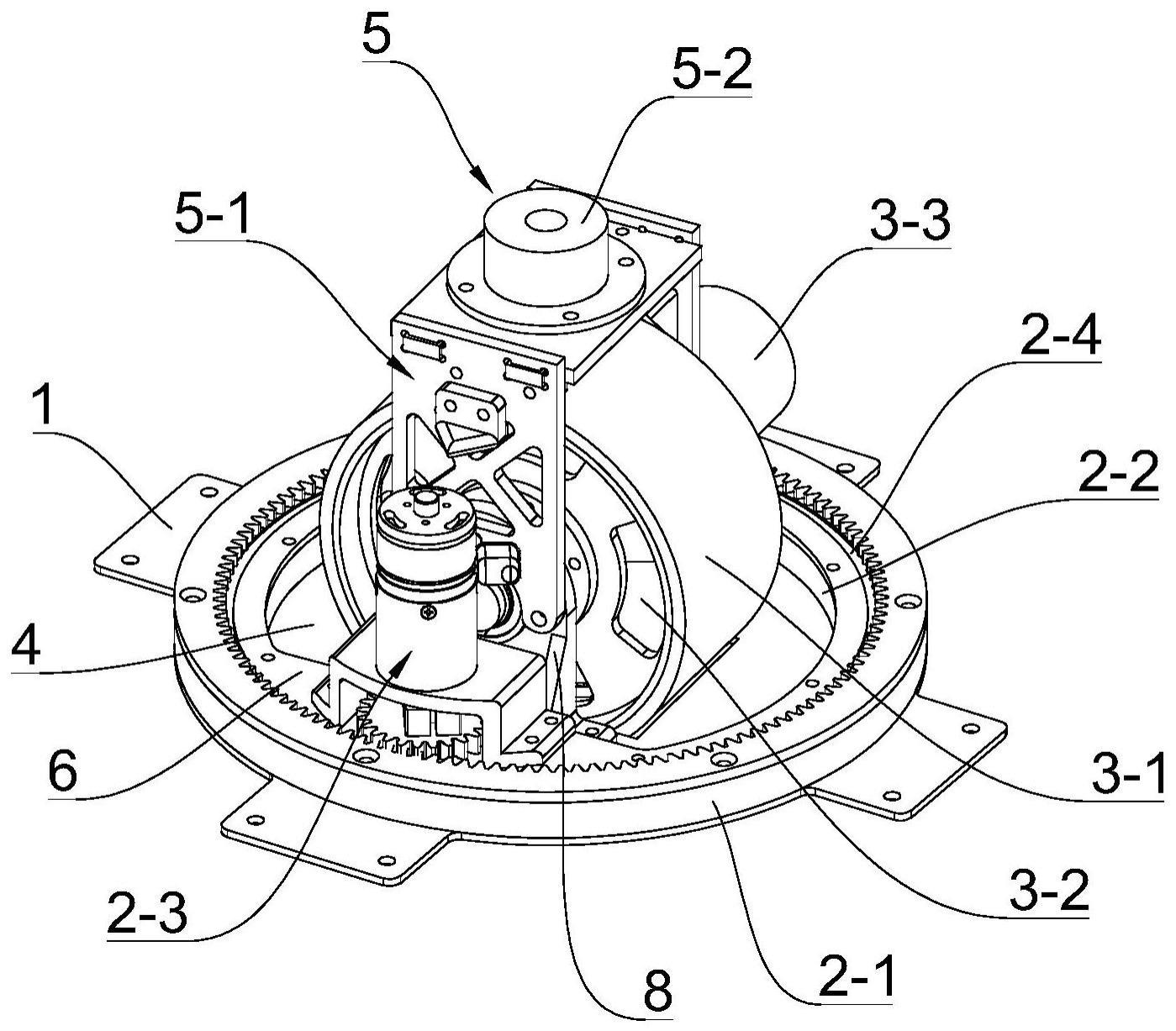
3、一种用于全向移动机器人底盘的舵轮装置,包括安装板、舵向机构、车轮机构、支撑板以及防绕线导电机构;其中,
4、所述舵向机构包括支撑外环、支撑内环以及舵向驱动机构,所述支撑外环与所述支撑内环之间通过轴承连接;所述支撑外环固定在安装板上,所述舵向驱动机构用于驱动支撑内环相对于支撑外环进行转动;所述支撑内环与所述支撑板固定连接;
5、所述车轮机构包括设置在所述支撑板上的车轮以及内置在所述车轮上用于驱动车轮转动的无刷电机;其中,所述车轮机构位于所述舵向机构的中心;
6、所述防绕线导电机构包括设置在支撑板上的固定架以及设置在所述固定架上的导电滑环,所述导电滑环与所述无刷电机以及舵向驱动机构电连接。
7、上述用于全向移动机器人底盘的舵轮装置的工作原理是:
8、工作时,舵向机构可以为舵轮装置提供舵向转动,车轮机构可以为舵轮装置提供车轮转动,实现水平面的全自由移动,具体地,安装板可安装在机器人底盘上,通过舵向驱动机构驱动支撑内环相对于支撑外环进行转动,带动支撑板旋转,从而带动车轮机构跟着旋转,实现了舵向转动;通过无刷电机直接驱动车轮转动,为舵轮装置提供向前运动的动力;通过设置导电滑环,可以避免无刷电机的三相线发生缠绕现象,结构更加简单。
9、本发明的一个优选方案,其中,所述支撑内环上设有连接板,所述连接板上设有电机座;所述舵向驱动机构包括设置在所述支撑外环上且与支撑外环同轴设置的环形齿轮、设置在所述电机座上的舵向电机以及设置在所述舵向电机的动力端的主动齿轮;所述主动齿轮与所述环形齿轮相互啮合。上述结构中,由于环形齿轮设置在支撑外环上,在舵向转动时,环形齿轮固定不动,主动齿轮在舵向电机的驱动下,会使得舵向电机、主动齿轮、电机座、连接板、支撑板、车轮机构一起随着支撑内环转动。
10、优选地,所述支撑板上设有第一支座和第二支座,所述车轮转动连接在第一支座和第二支座之间,所述固定架连接在第一支座和第二支座上。通过设置上述结构,方便了车轮与防绕线导电机构的安装。
11、优选地,所述车轮为pu包胶轮,所述无刷电机的电机轴转动连接在所述第一支座上,所述无刷电机设置在车轮的轮毂内。通过设置上述结构,可以使得结构变得更加简单紧凑,使得舵轮装置在竖直方向上占用空间较小。
12、优选地,所述车轮机构还包括转动反馈组件,所述转动反馈组件包括编码器以及联轴器;所述编码器设置在所述第二支座上,所述编码器的一端通过联轴器与所述无刷电机相连接,所述编码器用于检测无刷电机的转角,对无刷电机进行闭环控制。
13、优选地,所述固定架包括两个竖板和一个横板,其中,两个竖板的下端分别固定在第一支座与第二支座上;所述横板的一端与其中一个竖板的上端榫接,另一端与另一个竖板的上端榫接;所述导电滑环安装在所述横板上。通过设置上述结构,方便了导电滑环的安装,使得舵轮装置也变得十分紧凑。
14、优选地,所述导电滑环的轴线与所述轴承的轴线相互重合。其目的在于,结构更加紧凑,使得舵向机构在工作时更加方便运动,且运动时更加省力,保证了车轮可以实现舵向旋转。
15、优选地,所述导电滑环的定子与机器人底盘上的电源电连接,所述导电滑环的转子与所述无刷电机、舵向电机电连接。上述结构中,转子能绕定子随意转动任意角度,通过导电滑环实现舵轮装置与机器人底盘的电源电连接,解决了舵轮装置在旋转过程,电源线拧成麻花状或扭断的问题。
16、优选地,所述支撑板上设有第一避让槽,其目的在于,设置第一避让槽可以防止支撑板与车轮发生干涉,便于车轮的运动。
17、优选地,所述连接板上设有第二避让槽,其目的在于,通过设置第二避让槽,可以防止连接板与车轮机构发生干涉,便于舵向机构的运动。
18、所述连接板安装在支撑内环的上端,所述支撑板安装在支撑内环的下端。
19、本发明与现有技术相比具有以下有益效果:
20、1、本发明中的用于全向移动机器人底盘的舵轮装置,车轮机构位于舵向机构的中心;无需对舵轮机构的运动进行坐标系的转化,简化控制方案;且无刷电机位于车轮内部,使得舵轮装置结构简单、紧凑,便于封装,加工的零件也较少,加工成本以及加工精度要求低,整个舵轮装置在竖直方向上占用空间也较小。
21、2、本发明中的用于全向移动机器人底盘的舵轮装置,无刷电机位于车轮内部,通过无刷电机直接驱动车轮转动,为舵轮装置提供向前运动的动力,加快车轮向前进的响应速度,无需传动装置,从而避免传动过程中存在虚位影响了车轮响应。
22、3、本发明中的用于全向移动机器人底盘的舵轮装置,通过设置导电滑环,在舵向转动时,可以避免三相线发生缠绕现象。
技术特征:
1.一种用于全向移动机器人底盘的舵轮装置,其特征在于,包括安装板、舵向机构、车轮机构、支撑板以及防绕线导电机构;其中,
2.根据权利要求1所述的一种用于全向移动机器人底盘的舵轮装置,其特征在于,所述支撑内环上设有连接板,所述连接板上设有电机座;所述舵向驱动机构包括设置在所述支撑外环上且与支撑外环同轴设置的环形齿轮、设置在所述电机座上的舵向电机以及设置在所述舵向电机的动力端的主动齿轮;所述主动齿轮与所述环形齿轮相互啮合。
3.根据权利要求1所述的一种用于全向移动机器人底盘的舵轮装置,其特征在于,所述支撑板上设有第一支座和第二支座,所述车轮转动连接在第一支座和第二支座之间,所述固定架连接在第一支座和第二支座上。
4.根据权利要求3所述的一种用于全向移动机器人底盘的舵轮装置,其特征在于,所述车轮为pu包胶轮,所述无刷电机的电机轴转动连接在所述第一支座上,所述无刷电机设置在车轮的轮毂内。
5.根据权利要求3所述的一种用于全向移动机器人底盘的舵轮装置,其特征在于,所述车轮机构还包括转动反馈组件,所述转动反馈组件包括编码器以及联轴器;所述编码器设置在所述第二支座上,所述编码器的一端通过联轴器与所述无刷电机相连接,所述编码器用于检测无刷电机的转角,对无刷电机进行闭环控制。
6.根据权利要求3所述的一种用于全向移动机器人底盘的舵轮装置,其特征在于,所述固定架包括两个竖板和一个横板,其中,两个竖板的下端分别固定在第一支座与第二支座上;所述横板的一端与其中一个竖板的上端榫接,另一端与另一个竖板的上端榫接;所述导电滑环安装在所述横板上。
7.根据权利要求1所述的一种用于全向移动机器人底盘的舵轮装置,其特征在于,所述导电滑环的轴线与所述轴承的轴线相互重合。
8.根据权利要求2所述的一种用于全向移动机器人底盘的舵轮装置,其特征在于,所述导电滑环的定子与机器人底盘上的电源电连接,所述导电滑环的转子与所述无刷电机、舵向电机电连接。
9.根据权利要求1所述的一种用于全向移动机器人底盘的舵轮装置,其特征在于,所述支撑板上设有第一避让槽。
10.根据权利要求2所述的一种用于全向移动机器人底盘的舵轮装置,其特征在于,所述连接板上设有第二避让槽。
技术总结
本发明公开一种用于全向移动机器人底盘的舵轮装置,包括安装板、舵向机构、车轮机构、支撑板以及防绕线导电机构;所述舵向机构包括支撑外环、支撑内环以及舵向驱动机构,所述支撑外环固定在安装板上,所述舵向驱动机构用于驱动支撑内环相对于支撑外环进行转动;所述支撑内环与所述支撑板固定连接;所述车轮机构包括设置在所述支撑板上的车轮以及内置在所述车轮上的无刷电机;所述防绕线导电机构包括设置在支撑板上的固定架以及设置在所述固定架上的导电滑环。该舵轮装置结构简单,在竖直方向上占用空间较小,且采用无刷电机直接驱动车轮转动,避免传动过程中存在虚位的情况发生,在舵向转动时,可以避免三相线发生缠绕现象。
技术研发人员:陈俊伟,林杰坚,王华柯,江志鹏,杨明晖
受保护的技术使用者:广东工业大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!