一种翻滚爬行双运动方式的软体气动机器人
本发明涉及软体机器人,尤其涉及一种翻滚爬行双运动方式的软体气动机器人。
背景技术:
1、传统机器人通常都由不可形变的刚性材料制作而成,这种机器人的形状在规定好之后就不可改变,通常适应于特定的场所和环境下,能够呈现出高度精准性的特点。但这种机器人很难表现出对不同情况的适应性,对环境的适应能力差,运动灵活性有限。随着机器人运用领域的扩大,在医疗保健、复杂环境的勘探等特殊领域,传统刚性机器人难以适应非结构化的复杂环境。为了应对复杂的环境,软体机器人便由此而生。软体机器人采用柔软的材料构成,如硅胶,流体等。这些材料具有很好的弹性和可形变性,可以通过拉伸和压缩改变自身原有形状以适应复杂多变的外界环境。
2、软体机器人在平面上的运动方式主要分为爬行和翻滚两种方式。爬行更适应于有坡度的平面运动,对复杂环境的适应性更强,但这种运动方式的缺点是运动速度较慢、运动效率较低。翻滚的优点是这种运动方式的运动速度较快,但这种方式的机器人的运动稳定性,抗干扰能力会降低。
3、现阶段,虽然对软体机器人有一定的研究,但是,大多只具备单一的运动功能,要么只具有爬行功能,要么只具有翻滚功能,而同时具备两种运动功能的较为匮乏,而为了适应更加复杂的环境和表现出更高的运动效率,未来的软体机器人的运动势必会将多种运动方式结合在一起。因此,基于以上问题,本发明提供一种能够将爬行运动和翻滚运动有机结合的双运动方式气动软体机器人,是具有极其重要的创新性和探索意义的。
技术实现思路
1、有鉴于此,本发明的实施例提供了一种翻滚爬行双运动方式的软体气动机器人。
2、本发明的实施例提供的一种翻滚爬行双运动方式的软体气动机器人,包括:
3、第一驱动体,其外形为波纹管;
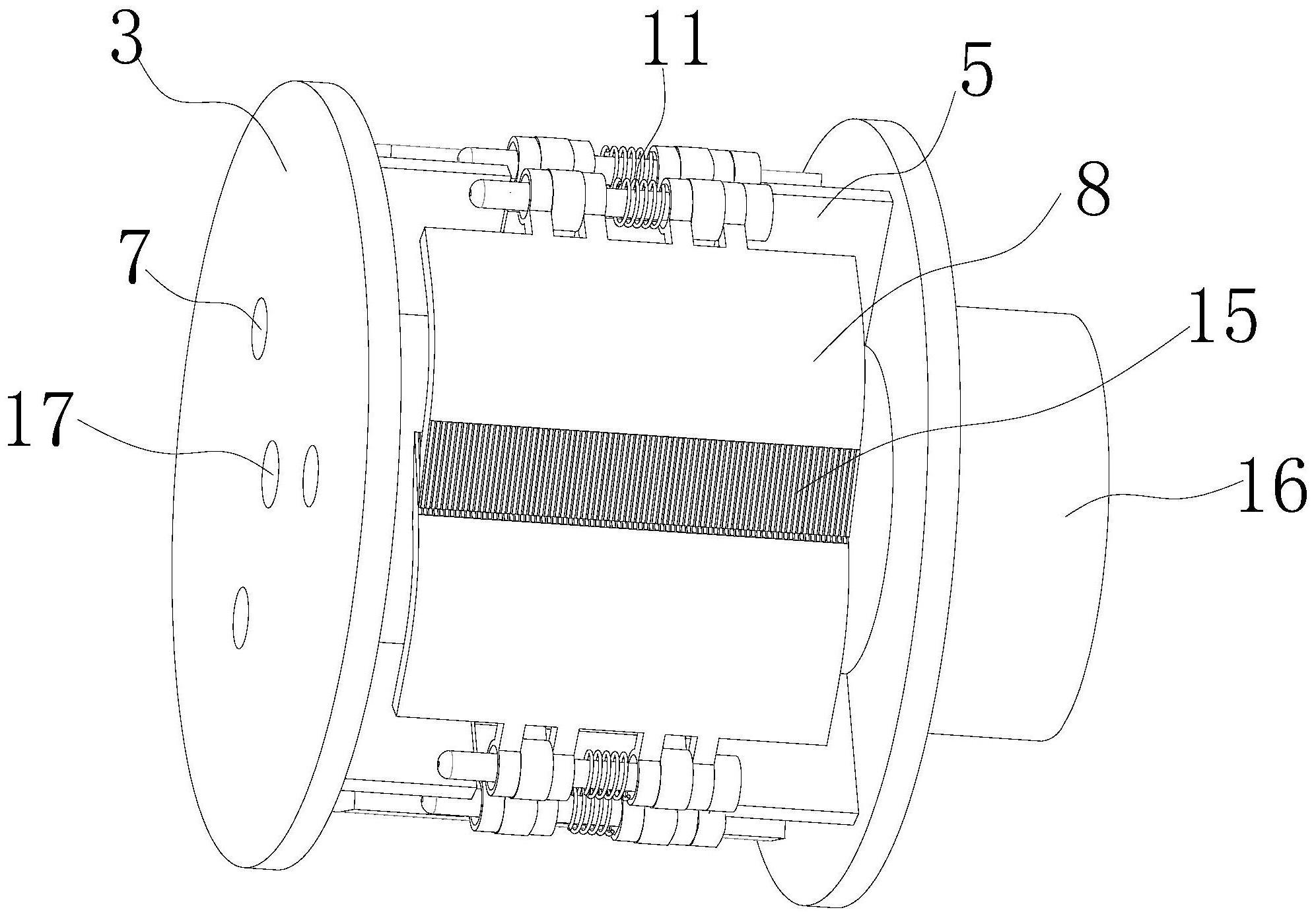
4、以及分别设置在所述第一驱动体两端的第二驱动体,每一所述第二驱动体包括柱状框架和至少三个气囊。其中所述柱状框架的外壁面上设有与各所述气囊一一对应的空腔,每一所述气囊容置在对应的所述空腔内且与该所述空腔的底面连接,所述柱状框架一端与所述第一驱动体连接、另一端设有与每一所述气囊连通的第一导气孔,任意相邻的两所述空腔之间形成设有隔板,每一所述空腔配备设有两弧挡板,每一所述弧挡板一端通过扭簧与对应的所述空腔一边的所述隔板可转动连接,且该所述弧挡板内凹面朝向对应的所述空腔中的所述气囊,以使每一所述气囊充气膨胀时对应的两所述弧挡板向外展开,每一所述弧挡板远离对应的所述隔板的一端延伸设有配重块,且每一所述弧挡板外凸面设有防滑纹。
5、进一步地,每一所述弧挡板与对应的所述隔板连接的一端一体成型设有转接杆,每一所述转接杆配备设有连接块,每一所述连接块的一端可转动套设在对应的所述转接杆上、另一端与对应的所述隔板固定连接,与每一所述弧挡板相适配的所述扭簧套设在对应的所述转接杆上,且该扭簧的两端分别与对应的所述连接块和对应的所述弧挡板相抵,以使在对应的所述气囊没有充气时,与该所述气囊相对的两所述弧挡板均向内收紧。
6、进一步地,每一所述连接块上设有两限位孔,每一所述隔板与对应的所述弧挡板连接的部位设有两限位柱,每一所述弧挡板上的所述连接块中的两所述限位孔分别套设在对应的两所述限位柱上。
7、进一步地,所述空腔的数量为三个,各所述空腔环绕所述柱状框架的中心线均匀布设。
8、进一步地,所述气囊的数量为三个,每一所述气囊的形状与对应的所述空腔的形状相适配。
9、进一步地,每一所述气囊通过对应的所述第一导气孔与外部的控气设备连接。
10、进一步地,一所述柱状框架上设有第二导气孔,且所述第二导气孔与所述第一驱动体连通,所述第一驱动体通过所述第二导气孔与外部的控气设备连接。
11、进一步地,任一所述柱状框架与所述第一驱动体的一端设有转接筒,每一所述柱状框架通过其上的所述转接筒与所述第一驱动体对应端密封固定连接。
12、进一步地,所述第一驱动体是由硅胶制成。
13、进一步地,所述配重块是由金属钨制成。
14、本发明的实施例提供的技术方案带来的有益效果是:本发明的一种翻滚爬行双运动方式的软体气动机器人,是同时具备爬行和翻滚功能的;并且在需要的时候可以实现两种运动功能中的一种,当进行单一爬行功能时,可以使一第二驱动体中的一气囊充气,进而使与该气囊相配备的防滑纹触地,增大摩擦,随后对第一驱动体内充气,此时由于两第二驱动体的摩擦一大一小,故此充气后的第一驱动体向摩擦小的一端伸长,待第一驱动体伸长后,对另一第二驱动体充气增大摩擦,原先的第二驱动体放气减小摩擦,且对第一驱动体放气,此时第一驱动体两端的摩擦还是一大一小,只不过大小端互换,待第一驱动体放气时,会向摩擦大的一端收缩,以此往复实现爬行;当进行单一翻滚功能时,两第二驱动体同步工作,现以一第二驱动体为例,当需要翻滚时,对一第二驱动体内的一气囊充气至完全状态,使该气囊配备的防滑纹触地,随后将该第二驱动体中另外两气囊处于排气收缩和充气半膨胀状态,使该两气囊配备的配重块位置发生改变,从而改变整个第二驱动体的重心,以此往复,实现翻滚;当本发明的软体机器人需要连续爬行和翻滚时,只需将上述两种动作同时进行即可。
技术特征:
1.一种翻滚爬行双运动方式的软体气动机器人,其特征在于,包括:
2.如权利要求1所述的一种翻滚爬行双运动方式的软体气动机器人,其特征在于:每一所述弧挡板与对应的所述隔板连接的一端一体成型设有转接杆,每一所述转接杆配备设有连接块,每一所述连接块的一端可转动套设在对应的所述转接杆上、另一端与对应的所述隔板固定连接,与每一所述弧挡板相适配的所述扭簧套设在对应的所述转接杆上,且该扭簧的两端分别与对应的所述连接块和对应的所述弧挡板相抵,以使在对应的所述气囊没有充气时,与该所述气囊相对的两所述弧挡板均向内收紧。
3.如权利要求2所述的一种翻滚爬行双运动方式的软体气动机器人,其特征在于:每一所述连接块上设有两限位孔,每一所述隔板与对应的所述弧挡板连接的部位设有两限位柱,每一所述弧挡板上的所述连接块中的两所述限位孔分别套设在对应的两所述限位柱上。
4.如权利要求1所述的一种翻滚爬行双运动方式的软体气动机器人,其特征在于:所述空腔的数量为三个,各所述空腔环绕所述柱状框架的中心线均匀布设。
5.如权利要求1所述的一种翻滚爬行双运动方式的软体气动机器人,其特征在于:所述气囊的数量为三个,每一所述气囊的形状与对应的所述空腔的形状相适配。
6.如权利要求1所述的一种翻滚爬行双运动方式的软体气动机器人,其特征在于:每一所述气囊通过对应的所述第一导气孔与外部的控气设备连接。
7.如权利要求1所述的一种翻滚爬行双运动方式的软体气动机器人,其特征在于:一所述柱状框架上设有第二导气孔,且所述第二导气孔与所述第一驱动体连通,所述第一驱动体通过所述第二导气孔与外部的控气设备连接。
8.如权利要求1所述的一种翻滚爬行双运动方式的软体气动机器人,其特征在于:任一所述柱状框架与所述第一驱动体的一端设有转接筒,每一所述柱状框架通过其上的所述转接筒与所述第一驱动体对应端密封固定连接。
9.如权利要求1所述的一种翻滚爬行双运动方式的软体气动机器人,其特征在于:所述第一驱动体是由硅胶制成。
10.如权利要求1所述的一种翻滚爬行双运动方式的软体气动机器人,其特征在于:所述配重块是由金属钨制成。
技术总结
本发明提供一种翻滚爬行双运动方式的软体气动机器人,包括第一驱动体以及分别设置在第一驱动体两端的第二驱动体,每一第二驱动体包括柱状框架和至少三个气囊,其中柱状框架的外壁面上设有与各气囊一一对应的空腔,每一气囊容置在对应的空腔内且与该空腔的底面连接,任意相邻的两空腔之间形成设有隔板,每一空腔配备设有两弧挡板,每一弧挡板一端通过扭簧与对应的空腔一边的隔板可转动连接,且该弧挡板内凹面朝向对应的空腔中的气囊,以使每一所述气囊充气膨胀时对应的两弧挡板向外展开,每一弧挡板远离对应的隔板的一端延伸设有配重块,且每一配重块外侧设有防滑纹。本发明结构简单,可以实现软体机器人的爬行和翻滚两种运动。
技术研发人员:孟庆鑫,孙学枫,赖旭芝,肖怀,王亚午,朱明亮
受保护的技术使用者:中国地质大学(武汉)
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!