代步车智能控制系统及方法与流程
本发明涉及代步车控制,特别是涉及一种代步车智能控制系统及方法。
背景技术:
1、目前带有变速装置的自行车在骑行爱好者圈子较为普及,用户可按需进行变速以达到在上坡等情形下省力骑行的目的,这类自行车具有一定的操作门槛,因此在大众中较难普及。此外,带有助力电机的代步车也在市场中逐渐普及,带有助力电机的代步车能够在用户骑行过程中,根据用户的骑行力矩使助力电机智能输出助力力矩,使得用户能够在上坡等难以骑行的路段能够轻松骑行。可见,传统的助力车能够实现的助力功能较少,带有变速功能的自行车有较高的操作门槛,带有助力电机的代步车只要是骑行力矩上升,助力电机即会介入,不利于能耗管理。
技术实现思路
1、发明目的:为了克服现有技术中存在的不足,本发明提供一种运行模式更多,有利于省力骑行且操作门槛低的代步车智能控制系统及方法。
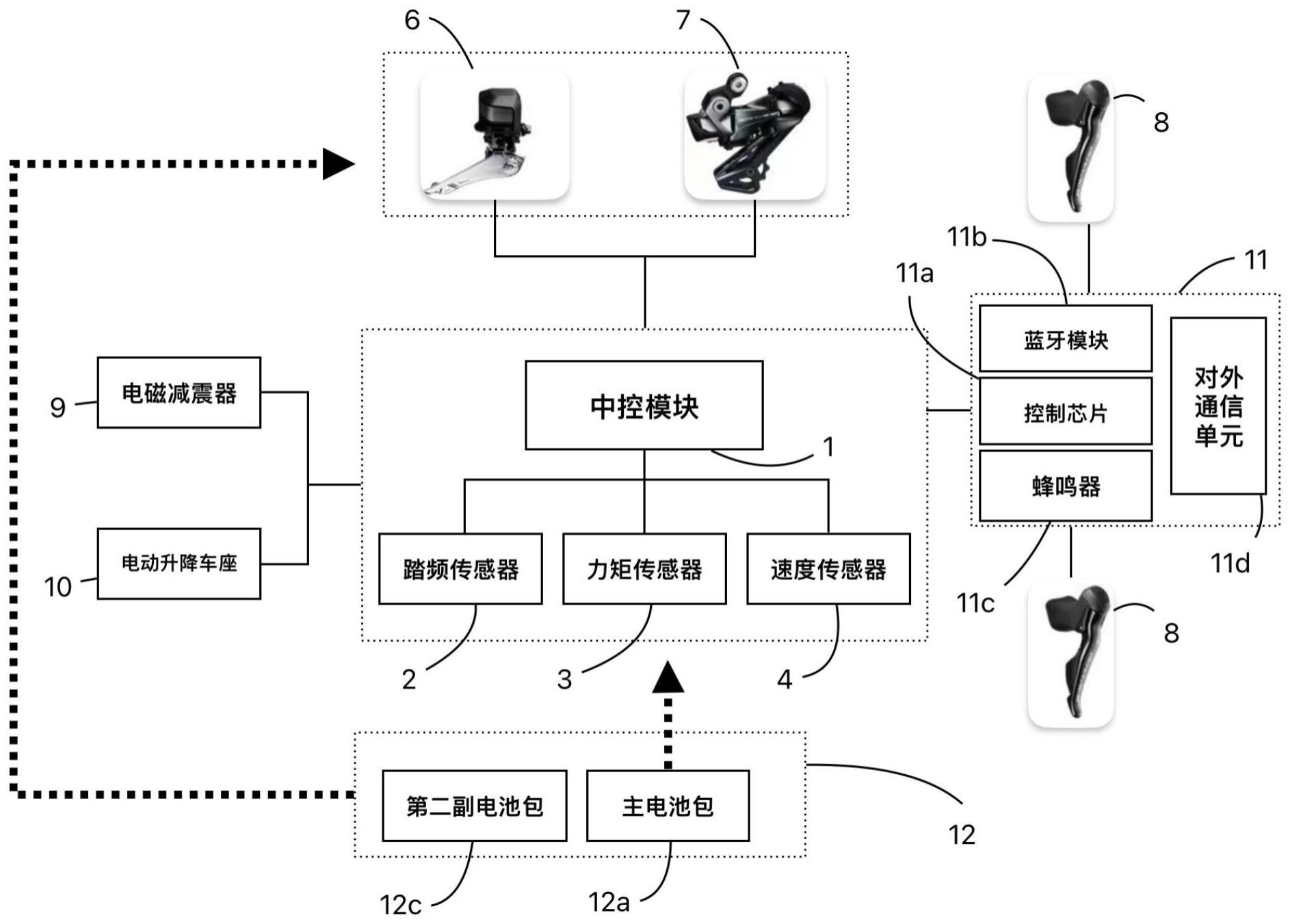
2、技术方案:为实现上述目的,本发明的代步车智能控制系统,其包括主控系统、电池系统以及电变速装置;所述电变速装置连接所述主控系统;所述主控系统包括中控模块,还包括与所述中控模块连接的传感系统;
3、所述传感系统还包括踏频传感器、力矩传感器以及速度传感器;
4、所述电变速装置能够改变连接五通中轴与驱动轮之间的链条的传动比;
5、所述中控模块能够根据所述传感系统采集的行驶数据调节所述电变速装置的传动速比。
6、进一步地,还包括助力电机,所述中控模块能够根据所述传感系统采集的行驶数据调节所述助力电机的运行功率。
7、进一步地,所述电变速装置包括前变速器与后变速器,所述链条跨接在所述前变速器与所述后变速器之间。
8、进一步地,还包括连接所述主控系统的电磁减震器和/或电动升降车座。
9、进一步地,还包括手动控制单元,所述主控系统能够根据所述手动控制单元发出的控制信号调节所述电变速装置的传动速比。
10、进一步地,还包括连接所述主控系统的对外交互系统;所述对外交互系统包括控制芯片以及连接所述控制芯片的蓝牙模块以及蜂鸣器以及对外通信单元。
11、进一步地,所述电池系统包括主电池包与副电池;所述副电池为所述电变速装置供电,所述主电池包为所述主控系统供电。
12、进一步地,所述电池系统仅包含一个电池包,所述电池包为所述主控系统供电;所述电变速装置通过同轴线连接所述主控系统,所述主控系统经由所述同轴线通过电力载波通信方式控制所述电变速装置,且所述主控系统通过所述同轴线为所述电变速装置供电。
13、代步车智能控制方法,其基于上述的代步车智能控制系统,并由所述中控模块实施,所述方法包括:
14、获取所述踏频传感器、力矩传感器以及速度传感器三者采集的踏频数据、力矩数据以及速度数据;
15、判断踏频、速度以及力矩三者的适配情况;
16、根据所述适配情况调节所述电变速装置的传动速比。
17、进一步地,所述根据所述适配情况调节所述电变速装置的传动速比包括:
18、当力矩数据与速度数据不适配,且力矩增量超过速度增量,提升所述电变速装置的传动速比;
19、当力矩数据与速度数据不适配,且速度增量超过力矩增量,降低所述电变速装置的传动速比。
20、进一步地,还包括连接所述中控系统的助力电机,所述方法还包括:
21、根据所述适配情况调节所述助力电机的运行功率。
22、进一步地,所述代步车智能控制系统还包括连接所述中控系统的电磁减震器和/或电动升降车座;所述方法还包括:
23、根据所述速度数据或手动控制单元的控制指令调节所述电磁减震器的阻尼和/或电动升降车座。
24、进一步地,所述电变速装置包括前变速器与后变速器这两个变速器,所述链条跨接在所述前变速器与所述后变速器之间;控制所述电变速装置改变传动速比时,所述方法包括:
25、判断需要变档的变速器的目标变档级数是否超过预定级数,得到第一判断结果;
26、当所述第一判断结果为否,直接控制所述变速器变档;
27、当所述第一判断结果为是,执行如下步骤:
28、控制需要变档的变速器执行变档操作的同时,控制另一个所述变速器同向跟随变档,且跟随变档的级数少于所述目标变档级数;
29、在需要变档的变速器变档到位后,控制另一个所述变速器回档复位。
30、有益效果:本发明的代步车智能控制系统及方法,通过设置电变速装置调节链条的传动速比,中控模块可以根据代步车的运行参数通过智能改变传动速比与助力电机的运行功率两者中至少一者以实现省力目的,同时减少能耗,如此可实现更多的助力模式,提升助力里程。
技术特征:
1.代步车智能控制系统,其特征在于,其包括主控系统、电池系统(12)以及电变速装置;所述电变速装置连接所述主控系统;所述主控系统包括中控模块(1),还包括与所述中控模块(1)连接的传感系统;
2.根据权利要求1所述的代步车智能控制系统,其特征在于,还包括助力电机(5),所述中控模块(1)能够根据所述传感系统采集的行驶数据调节所述助力电机(5)的运行功率。
3.根据权利要求1所述的代步车智能控制系统,其特征在于,所述电变速装置包括前变速器(6)与后变速器(7),所述链条跨接在所述前变速器(6)与所述后变速器(7)之间。
4.根据权利要求1所述的代步车智能控制系统,其特征在于,还包括连接所述主控系统的电磁减震器(9)和/或电动升降车座(10)。
5.根据权利要求1所述的代步车智能控制系统,其特征在于,还包括手动控制单元(8),所述主控系统能够根据所述手动控制单元(8)发出的控制信号调节所述电变速装置的传动速比。
6.根据权利要求1所述的代步车智能控制系统,其特征在于,还包括连接所述主控系统的对外交互系统(11);所述对外交互系统(11)包括控制芯片(11a)以及连接所述控制芯片(11a)的蓝牙模块(11b)以及蜂鸣器(11c)以及对外通信单元(11d)。
7.根据权利要求1所述的代步车智能控制系统,其特征在于,所述电池系统(12)包括主电池包(12a)与副电池(12b);所述副电池(12b)为所述电变速装置供电,所述主电池包(12a)为所述主控系统供电。
8.根据权利要求1所述的代步车智能控制系统,其特征在于,所述电池系统(12)仅包含一个电池包,所述电池包为所述主控系统供电;所述电变速装置通过同轴线连接所述主控系统,所述主控系统经由所述同轴线通过电力载波通信方式控制所述电变速装置,且所述主控系统通过所述同轴线为所述电变速装置供电。
9.代步车智能控制方法,其基于权利要求1所述的代步车智能控制系统,并由所述中控模块(1)实施,其特征在于,所述方法包括:
10.根据权利要求8所述的代步车智能控制方法,其特征在于,所述根据所述适配情况调节所述电变速装置的传动速比包括:
11.根据权利要求9所述的代步车智能控制方法,其特征在于,还包括连接所述中控系统的助力电机(5),所述方法还包括:
12.根据权利要求9所述的代步车智能控制方法,其特征在于,所述代步车智能控制系统还包括连接所述中控系统的电磁减震器(9)和/或电动升降车座(10);所述方法还包括:
13.根据权利要求9所述的代步车智能控制方法,其特征在于,所述电变速装置包括前变速器(6)与后变速器(7)这两个变速器,所述链条跨接在所述前变速器(6)与所述后变速器(7)之间;控制所述电变速装置改变传动速比时,所述方法包括:
技术总结
本发明公开了一种代步车智能控制系统及方法,其中智能控制系统代步车智能控制系统,其包括主控系统、电池系统以及电变速装置;电变速装置连接主控系统;主控系统包括中控模块,还包括与中控模块连接的传感系统;传感系统还包括踏频传感器、力矩传感器以及速度传感器;电变速装置能够改变连接五通中轴与驱动轮之间的链条的传动比;中控模块能够根据传感系统采集的行驶数据调节电变速装置的传动速比。本发明通过设置电变速装置调节链条的传动速比,中控模块可以根据代步车的运行参数通过智能改变传动速比以实现省力目的,在优选方案中,还可以结合调节助力电机的运行功率达到省力目的,同时减少能耗,如此可实现更多的助力模式,提升助力里程。
技术研发人员:曹宇宁
受保护的技术使用者:德威(苏州)新能源有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!