多向高适应性复合关节支撑腿、高空作业机器人及应用的制作方法
本发明属于机械工程机器人,尤其涉及多向高适应性复合关节支撑腿、高空作业机器人及应用。
背景技术:
1、当前,针对高空作业的钢结构喷涂机器人已开展相关研究及示范应用,以解决,高空、高强度、高危作业的问题,有效提高工程施工效率,加快工程进度。通过上述分析,现有技术存在的问题及缺陷为:现有技术大多是针对钢柱等竖向构件进行喷涂,并没有针对高空曲面屋盖钢檩条进行喷涂作业的机器人设备,由于机器人坡屋面上行走时会遇到一个问题:当屋面曲率过大时,机器人平台若过高,导致重心过高,会出现脱轨问题。正因为坡屋面居多,导致通过高空机器人实现在非水平屋面作业是亟待解决的技术难题。
技术实现思路
1、为克服相关技术中存在的问题,本发明公开实施例提供了多向高适应性复合关节支撑腿、高空作业机器人及应用,属于高空作业钢结构喷涂机器人领域,可应用于高空檩条喷涂机器人作业。
2、所述技术方案如下:一种多向高适应性复合关节支撑腿包括:支撑腿部件;
3、所述支撑腿部件的首尾端分别安装有咬合齿轮与轮连接件;通过咬合齿轮与机器人车体咬合连接,轮连接件与带磁动力轮连接。
4、在一个实施例中,所述支撑腿部件还包括:铰合肘关节、上直臂及下曲臂;
5、所述咬合齿轮与铰合肘关节固定焊接;所述铰合肘关节通过上直臂、下曲臂与轮连接件可活动连接,并形成平行四边形机构。
6、在一个实施例中,所述铰合肘关节上还焊接有耳板、底板;所述耳板与底板焊接围成框架结构;耳板上开设有定位孔;
7、底板上开设有容纳调节螺栓穿过的螺栓孔;调节螺栓外套设有弹簧;通过外套的弹簧与调节板上成型的定位块顶紧,用于调节板的减振。
8、在一个实施例中,所述调节板上开设有不规则通孔,环绕不规则通孔开设有第一调节孔、第二调节孔、第三调节孔、第四调节孔;
9、所述第四调节孔通过光轴与定位孔可旋转连接;
10、所述第一调节孔、第二调节孔分别与上直臂的第一直臂孔、第二直臂孔可旋转连接;
11、所述第三调节孔与下曲臂的曲臂上端轴孔可旋转连接。
12、在一个实施例中,第二调节孔为多个,以第一调节孔为圆心分布,实现支撑腿部件形成的平行四边形机构的顺滑限位。
13、在一个实施例中,上直臂的末端开设有第三直臂孔,通过光轴与轮连接件上的轮连接框架开设的上孔可旋转连接;
14、下曲臂的末端开设有曲臂下端轴孔,并通过光轴与与轮连接件上的轮连接框架开设的下孔可旋转连接。
15、在一个实施例中,铰合肘关节与机器人本体通过竖轴连接,用于实现轮腿绕竖轴的水平转动;
16、弹簧与定位块保持一定间隙,用于减震。
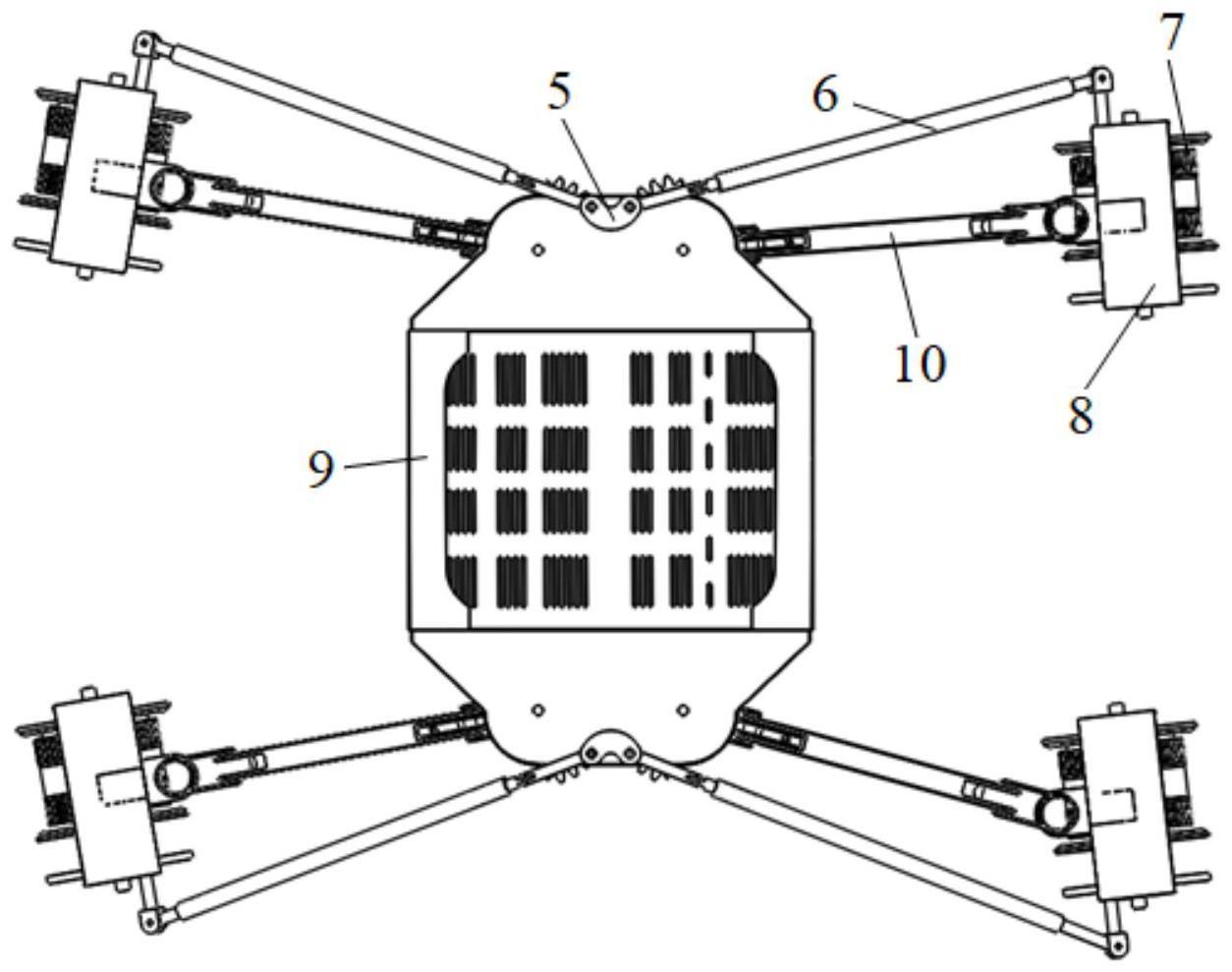
17、本发明的另一目的在于提供一种高空作业机器人,所述高空作业机器人包括所述的四条支撑腿部件,一端装配在一个机器人车体上,另一端通过轮架与磁动力轮连接;
18、机器人车体前后两端均安装有纠偏调节杆定位板;纠偏调节杆定位板左右两侧分别连接轮腿纠偏调节杆的首段;轮腿纠偏调节杆的尾端通过可活动架连接轮架。
19、本发明的另一目的在于提供一种所述高空作业机器人在水平屋面喷涂作业上的应用。
20、本发明的另一目的在于提供一种所述高空作业机器人在非水平屋面喷涂作业上的应用。
21、结合上述的所有技术方案,本发明所具备的优点及积极效果为:
22、第一、针对上述现有技术存在的技术问题以及解决该问题的难度,紧密结合本发明的所要保护的技术方案以及研发过程中结果和数据等,详细、深刻地分析本发明技术方案如何解决的技术问题,解决问题之后带来的一些具备创造性的技术效果,具体描述如下:本发明提供一种多向高适应性复合关节支撑腿,支撑整机姿态能够适应屋面坡度变化,方便机器人在坡屋面上稳定行走并进行后续的作业。
23、第二、把技术方案看作一个整体或者从产品的角度,本发明所要保护的技术方案具备的技术效果和优点,具体描述如下:本发明通过带定位孔的铰肘关节调节板的不同角度定位孔设计能够适应屋顶坡度的变化,支撑机身姿态能够适应屋面坡度的变化,方便机器人在非水平屋面上稳定行走,避免脱轨的问题,方便后续进行作业。
技术特征:
1.一种多向高适应性复合关节支撑腿,其特征在于,包括:支撑腿部件(10)所述支撑腿部件(10)的首尾端分别安装有咬合齿轮(15)和轮连接件(3);通过咬合齿轮(15)与机器人车体(9)咬合连接,通过轮连接件(3)与带磁动力轮(7)连接。
2.根据权利要求1所述的多向高适应性复合关节支撑腿,其特征在于,所述支撑腿部件(10)还包括:铰合肘关节(1)、上直臂(2)及下曲臂(4);
3.根据权利要求2所述的多向高适应性复合关节支撑腿,其特征在于,所述铰合肘关节(1)上焊接有耳板(12)、底板(16);所述耳板(12)与底板(16)焊接围成框架结构,耳板(12)上开设有定位孔(121);
4.根据权利要求3所述的多向高适应性复合关节支撑腿,其特征在于,所述调节板(11)上开设有不规则通孔,环绕不规则通孔开设有第一调节孔(110)、第二调节孔(111)、第三调节孔(112)、第四调节孔(113);
5.根据权利要4所述的多向高适应性复合关节支撑腿,其特征在于,上述第二调节孔(111)为多个,以第一调节孔(110)为圆心分布。
6.根据权利要求2所述的多向高适应性复合关节支撑腿,其特征在于,上直臂(2)的末端开设有第三直臂孔(23),通过光轴与轮连接件(3)上的轮连接框架开设的上孔旋转连接;下曲臂(4)的末端开设有曲臂下端轴孔(42),并通过光轴与与轮连接件(3)上的轮连接框架开设的下孔旋转连接。
7.根据权利要3所述的多向高适应性复合关节支撑腿,其特征在于,铰合肘关节(1)与机器人本体(9)通过竖轴连接,用于实现轮腿绕竖轴的水平转动;
8.一种高空作业机器人,其特征在于,所述高空作业机器人包括权利要求1-7任意一项所述的四条支撑腿部件(10),一端装配在一个机器人车体(9)上,另一端通过轮架(8)与磁动力轮(7)连接;
9.一种如权利要求8所述高空作业机器人在水平屋面喷涂作业上的应用。
10.一种如权利要求8所述高空作业机器人在非水平屋面喷涂作业上的应用。
技术总结
本发明属于机械工程机器人技术领域,公开了多向高适应性复合关节支撑腿、高空作业机器人及应用。多向高适应性复合关节支撑腿包括:支撑腿部件;所述支撑腿部件的首尾端分别安装有咬合齿轮与轮连接件;通过咬合齿轮与机器人车体咬合连接,轮连接件与带磁动力轮连接。支撑整机姿态能够适应屋面坡度变化,方便机器人在坡屋面上稳定行走并进行后续的作业。本发明通过带定位孔的铰肘关节调节板的不同角度定位孔设计能够适应屋顶坡度的变化,支撑机身姿态能够适应屋面坡度的变化,方便机器人在非水平屋面上稳定行走,避免脱轨的问题,方便后续进行作业。
技术研发人员:田承昊,陶然,李俊生,赵光伟,张鹏,周宇涛
受保护的技术使用者:中国铁路设计集团有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!