线控转向系统及其控制方法和控制装置、存储介质与流程
本发明涉及车辆,尤其涉及一种线控转向系统的控制方法、一种线控转向系统的控制装置、一种计算机可读存储介质和一种线控转向系统。
背景技术:
1、在线控转向系统中,取消机械中间轴,实现了方向盘和车轮的机械硬件完全解耦,取而代之的是通过转向角信号和转向电机控制车轮转向。该技术极大的推进了汽车的集成化、轻量化、网联化和智能化,是车辆智能化,无人驾驶系统等新型热门领域发展的关键技术。
2、传统转向中不存在路感模拟,因为方向盘是直接通过中间轴与下转连接,路感可以通过机械连接传递至驾驶员手中。而对于线控转向系统,由于没有机械连接转向管柱与转向器,因此,驾驶员的路感反馈全部通过手感电机用来产生作用于方向盘的阻力矩以模拟手感。手感是一个比较抽象的定义,像传统的转向系统一样精准的反馈路面的信息或者是满足全自动驾驶的纯模拟手感成了需要平衡的两个方面。
技术实现思路
1、本发明旨在至少在一定程度上解决相关技术中的技术问题之一。为此,本发明的第一个目的在于提出一种线控转向系统的控制方法,通过获取多个场景下方向盘的转向力矩,响应触发指令,并根据触发指令和目标场景下方向盘的转向力矩对方向盘进行控制,从而能够根据驾驶的需求场景对方向盘的转向力矩进行个性化调节,实现可定制的转向手感模拟。
2、本发明的第二个目的在于提出一种线控转向系统的控制装置。
3、本发明的第三个目的在于提出一种计算机可读存储介质。
4、本发明的第四个目的在于提出一种线控转向系统。
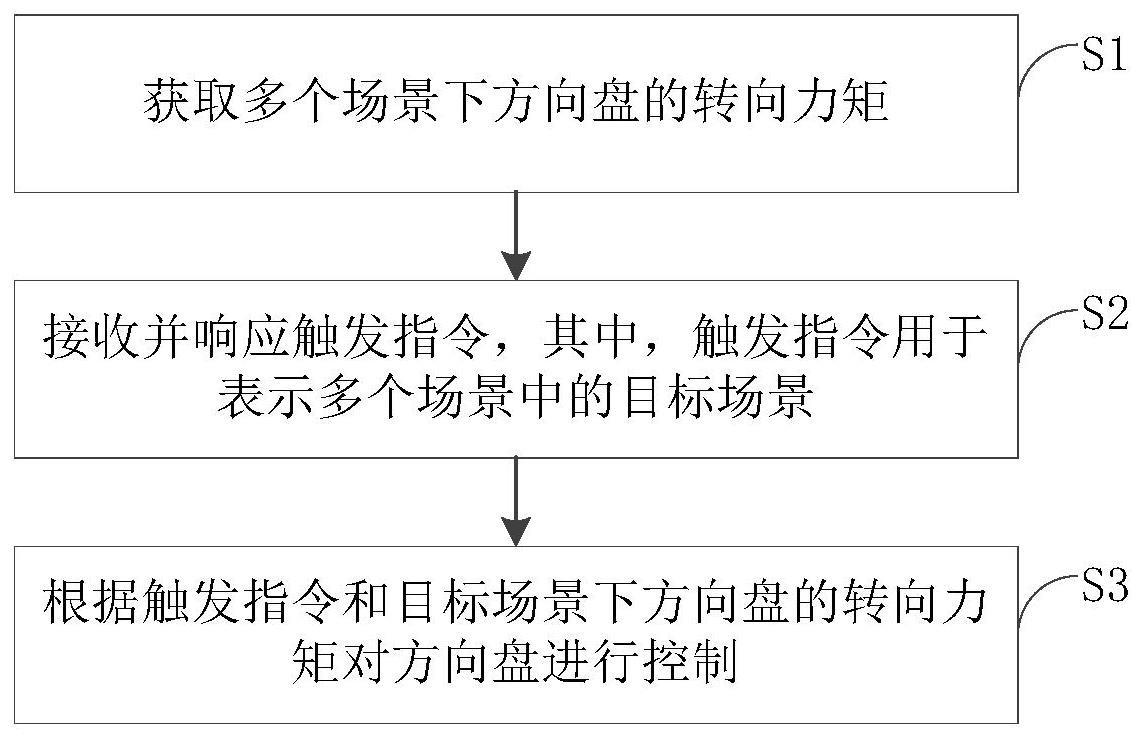
5、为达到上述目的,本发明第一方面实施例提出了一种线控转向系统的控制方法,包括:获取多个场景下方向盘的转向力矩;接收并响应触发指令,其中,触发指令用于表示多个场景中的目标场景;根据触发指令和目标场景下方向盘的转向力矩对方向盘进行控制。
6、根据本发明实施例的线控转向系统的控制方法,首先获取多个场景下方向盘的转向力矩,然后接收并响应触发指令,其中,触发指令用于表示多个场景中的目标场景,最后根据触发指令和目标场景下方向盘的转向力矩对方向盘进行控制。由此,该方法能够根据驾驶的需求场景对方向盘的转向力矩进行个性化调节,实现可定制的转向手感模拟。
7、另外,根据本发明上述实施例的线控转向系统的控制方法还可以具有如下的附加技术特征:
8、根据本发明的一个实施例,多个场景包括路面反馈场景,获取多个场景下方向盘的转向力矩,包括:获取车轮的横向力矩和车轮控制器的状态信号;根据车轮的横向力矩和车轮控制器的状态信号确定方向盘的转向力矩。
9、根据本发明的一个实施例,车轮的横向力矩与方向盘的转向力矩呈正相关关系。
10、根据本发明的一个实施例,多个场景包括路面识别场景,获取多个场景下方向盘的转向力矩,包括:获取路面图像;根据路面图像确定路面附着系数;根据路面附着系数确定方向盘的转向力矩。
11、根据本发明的一个实施例,多个场景包括车机游戏场景,获取多个场景下方向盘的转向力矩,包括:获取车机游戏场景下的驾驶模式;根据驾驶模式确定方向盘的转向力矩。
12、根据本发明的一个实施例,多个场景包括主动回正场景、阻尼控制场景和末端锁止场景中的一种或多种,获取多个场景下方向盘的转向力矩,包括:根据主动回正信号、或者阻尼控制信号、或者末端锁止信号确定方向盘的转向力矩。
13、根据本发明的一个实施例,在接收并响应触发指令之前,线控转向系统的控制方法还包括:确定线控转向系统处于驾驶员在环模式。
14、为达到上述目的,本发明第二方面实施例提出了一种线控转向系统的控制装置,包括:获取模块,用于获取多个场景下方向盘的转向力矩;接收模块,用于接收并响应触发指令,其中,触发指令用于表示多个场景中的目标场景;控制模块,用于根据触发指令和目标场景下方向盘的转向力矩对方向盘进行控制。
15、根据本发明实施例的线控转向系统的控制装置,获取模块用于获取多个场景下方向盘的转向力矩,接收模块用于接收并响应触发指令,其中,触发指令用于表示多个场景中的目标场景,控制模块用于根据触发指令和目标场景下方向盘的转向力矩对方向盘进行控制。由此,该装置能够根据驾驶的需求场景对方向盘的转向力矩进行个性化调节,实现可定制的转向手感模拟。
16、为达到上述目的,本发明第三方面实施例提出了一种计算机可读存储介质,其上存储有线控转向系统的控制程序,该线控转向系统的控制程序被处理器执行时实现上述的线控转向系统的控制方法。
17、根据本发明实施例的计算机可读存储介质,通过执行时实现上述的线控转向系统的控制方法,能够根据驾驶的需求场景对方向盘的转向力矩进行个性化调节,实现可定制的转向手感模拟。
18、为达到上述目的,本发明第四方面实施例提出的一种线控转向系统,包括存储器、处理器及存储在存储器上并可在处理器上运行的线控转向系统的控制程序,处理器执行程序时,实现上述的线控转向系统的控制方法。
19、根据本发明实施例的线控转向系统,通过执行上述的线控转向系统的控制方法,能够根据驾驶的需求场景对方向盘的转向力矩进行个性化调节,实现可定制的转向手感模拟。
20、本发明附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:
1.一种线控转向系统的控制方法,其特征在于,所述方法包括:
2.根据权利要求1所述的线控转向系统的控制方法,其特征在于,所述多个场景包括路面反馈场景,获取多个场景下方向盘的转向力矩,包括:
3.根据权利要求2所述的线控转向系统的控制方法,其特征在于,所述车轮的横向力矩与所述方向盘的转向力矩呈正相关关系。
4.根据权利要求1所述的线控转向系统的控制方法,其特征在于,所述多个场景包括路面识别场景,获取多个场景下方向盘的转向力矩,包括:
5.根据权利要求1所述的线控转向系统的控制方法,其特征在于,所述多个场景包括车机游戏场景,获取多个场景下方向盘的转向力矩,包括:
6.根据权利要求1所述的线控转向系统的控制方法,其特征在于,所述多个场景包括主动回正场景、阻尼控制场景和末端锁止场景中的一种或多种,获取多个场景下方向盘的转向力矩,包括:
7.根据权利要求1-6中任一项所述的线控转向系统的控制方法,其特征在于,在接收并响应触发指令之前,所述方法还包括:
8.一种线控转向系统的控制装置,其特征在于,包括:
9.一种计算机可读存储介质,其特征在于,其上存储有线控转向系统的控制程序,该线控转向系统的控制程序被处理器执行时实现根据权利要求1-7中任一项所述的线控转向系统的控制方法。
10.一种线控转向系统,其特征在于,包括存储器、处理器及存储在存储器上并可在处理器上运行的线控转向系统的控制程序,所述处理器执行所述线控转向系统的控制程序时,实现根据权利要求1-7中任一项所述的线控转向系统的控制方法。
技术总结
本发明公开了一种线控转向系统及其控制方法和控制装置、存储介质,所述方法包括:获取多个场景下方向盘的转向力矩;接收并响应触发指令,其中,触发指令用于表示多个场景中的目标场景;根据触发指令和目标场景下方向盘的转向力矩对方向盘进行控制。本发明的控制方法,能够根据驾驶的需求场景对方向盘的转向力矩进行个性化调节,实现可定制的转向手感模拟。
技术研发人员:宋怀文,梁建平,屠苏,许挺,徐海龙,黄斯亭,杨鹏飞,范宏超,孟凡坡
受保护的技术使用者:浙江吉利控股集团有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!