儿童推车及座舱位置调节方法与流程
本申请涉及推车,具体涉及儿童推车及座舱位置调节方法。
背景技术:
1、儿童推车一般由车架、座舱、遮阳蓬、防霾罩等组成,专用于婴幼儿出行时使用,传统的儿童推车其座舱和车架大都是一体的,推车的重心不能自动调节,经过斜坡和高低坑洼路面时因为推车重心突变,容易前倾或侧翻,造成儿童头部着地,容易给儿童带来危险。不能自适应路况,儿童在经过颠簸路面时乘坐舒适度差、安全性低。
2、并且,随着露营、越野等户外运动的兴起,越来越多的家长选择使用儿童推车带儿童一同进行户外越野、露营,但是儿童的骨骼和身体组织发育尚未完全,在外力的晃动、震动下会受到伤害,部分厂家为座舱设置了减震结构,但是这只能在推车遇到小颠簸时起到缓冲防震,提高儿童舒适度的作用,并不能防止儿童推车前倾或侧翻,为此,需要设计一款座舱位置自适应的智能儿童推车。
技术实现思路
1、本申请的一个目的在于提供一种儿童推车,实现确保儿童乘坐舒适性和安全性。
2、本申请的另一个目的在于提供一种座舱位置调节方法,实现自适应调整座舱位置,稳定推车重心,从而提高儿童乘坐舒适性和安全性。
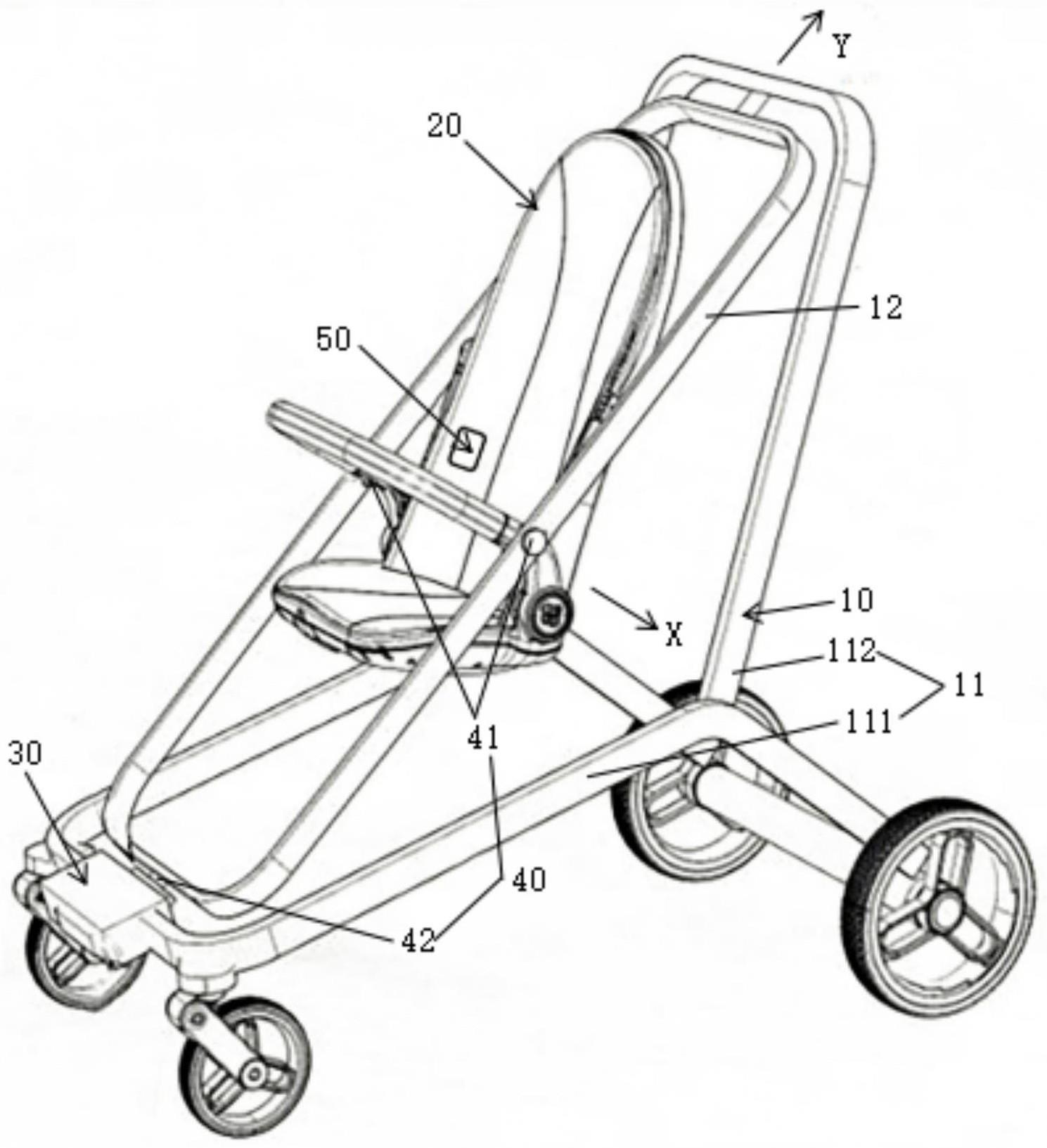
3、为达到本申请的目的之一,本申请采用的技术方案为:一种儿童推车,包括车架和座舱,所述座舱相对所述车架活动设置,所述座舱能够相对所述车架围绕第一转轴及第二转轴转动,所述第一转轴与所述第二转轴相交,所述儿童推车还包括:
4、检测模块,适于采集所述座舱的姿态变化数据;
5、控制模块,与所述检测模块通信连接,适于接收并分析所述座舱的姿态变化数据,并生成控制信号;
6、驱动模块,与所述控制模块通信连接,适于根据所述控制信号驱动所述座舱围绕所述第一转轴和/或所述第二转轴转动。
7、作为一种优选,所述第一转轴沿水平方向设置,所述第二转轴垂直所述第一转轴设置。
8、作为一种优选,所述车架包括第一框架及第二框架,所述第二框架转动设置在所述第一框架上,所述座舱转动设置在所述第二框架上,所述第二框架及其上的所述座舱能够相对所述第一框架围绕所述第二转轴转动,所述座舱能够相对所述第二框架围绕所述第一转轴转动。
9、作为一种优选,所述检测模块安装在所述座舱上,所述姿态变化数据包括所述座舱的加速度和角速度。
10、作为一种优选,所述检测模块包括多轴传感器,所述多轴传感器为6轴运动传感器或9轴运动传感器或10轴运动传感器。
11、作为一种优选,所述控制模块包括微处理器。
12、作为一种优选,所述驱动模块包括适于驱使所述座舱围绕所述第一转轴转动的第一电机装置,及适于驱使所述座舱围绕所述第二转轴转动的第二电机装置,所述第一电机装置、所述第二电机装置分别包括电机及对应的电机驱动器。
13、为达到本申请的另一目的,本申请提供的技术方案为:座舱位置调节方法,应用于上述儿童推车,其包括步骤:
14、座舱姿态检测,检测模块采集所述座舱的姿态变化数据;
15、座舱姿态分析,控制模块接收所述座舱的姿态变化数据,判断所述座舱的位置是否发生大幅变化,如是,则根据所述座舱姿态变化数据,解析出座舱复位需要围绕第一转轴和/或第二转轴转动的运动量,并生成相应的控制信号,如否,则返回座舱姿态检测步骤;
16、座舱姿态调整,驱动模块根据所述控制信号控制所述座舱围绕第一转轴和/或第二转轴转动一定角度,使所述座舱复位,并再次进入座舱姿态检测步骤。
17、作为一种优选,在所述座舱姿态分析步骤中,所述控制模块预设有一关于所述座舱的正常位置区间[-q,q],当所述座舱的姿态变化数据处于该正常位置区间内时,所述控制模块判定所述座舱的位置未发生大幅变化,当所述座舱的姿态变化数据超出该正常位置区间时,所述控制模块判定所述座舱的位置发生大幅变化。
18、作为一种优选,在所述座舱姿态分析步骤中,如所述控制模块判断出所述座舱的位置仅围绕所述第一转轴发生大幅变化,则对第一电机装置下发控制信号,所述第一电机装置驱动所述座舱围绕所述第一转轴转动复位,如所述控制模块判断出所述座舱的位置仅围绕所述第二转轴发生大幅变化,则对第二电机装置下发控制信号,所述第二电机装置驱动所述座舱围绕所述第二转轴转动复位,如所述控制模块判断出所述座舱的位置同时围绕所述第一转轴与所述第二转轴发生大幅变化,则同时对第一电机装置和第二电机装置下发控制信号,以驱动所述座舱围绕所述第一转轴和所述第二转轴转动复位。
19、与现有技术相比,本申请的有益效果在于:(1)相比传统的座舱和车架一体式的推车,本申请座舱与车架分体设置,座舱具有调节位置、不随车架同步颠簸的可能性;(2)通过检测模块、控制模块、驱动模块相互配合实时地调整座舱位置,电动调节方式相较机械避震结构具有响应快速、调节过程稳定的优点,能够智能适应不同路况,确保儿童的乘坐舒适性;(3)推车的重心位置和座舱位置是紧密相关的,在实时调节座舱位置时,自然调整了推车的重心,使得推车重心稳定,大大减少了推车倒地的几率,提高了儿童乘坐的安全性;(4)遇到极端陡峭、剧烈颠簸或其他恶劣条件时,推车可能前倾、侧翻倒地,本申请在推车倒地过程中,座舱位置经由实时复位,座舱重心始终向下,座舱与地面接触的一刻,儿童臀部先行接触地面,相较儿童头部撞击地面能够大大减轻伤害。
技术特征:
1.一种儿童推车,包括车架和座舱,其特征在于,所述座舱相对所述车架活动设置,所述座舱能够相对所述车架围绕第一转轴及第二转轴转动,所述第一转轴与所述第二转轴相交,所述儿童推车还包括:
2.如权利要求1所述的儿童推车,其特征在于:所述第一转轴沿水平方向设置,所述第二转轴垂直所述第一转轴设置。
3.如权利要求2所述的儿童推车,其特征在于:所述车架包括第一框架及第二框架,所述第二框架转动设置在所述第一框架上,所述座舱转动设置在所述第二框架上,所述第二框架及其上的所述座舱能够相对所述第一框架围绕所述第二转轴转动,所述座舱能够相对所述第二框架围绕所述第一转轴转动。
4.如权利要求1-3任一所述的儿童推车,其特征在于:所述检测模块安装在所述座舱上,所述姿态变化数据包括所述座舱的加速度和角速度。
5.如权利要求4所述的儿童推车,其特征在于:所述检测模块包括多轴传感器,所述多轴传感器为6轴运动传感器或9轴运动传感器或10轴运动传感器。
6.如权利要求1-3任一所述的儿童推车,其特征在于:所述控制模块包括微处理器。
7.如权利要求1-3任一所述的儿童推车,其特征在于:所述驱动模块包括适于驱使所述座舱围绕所述第一转轴转动的第一电机装置,及适于驱使所述座舱围绕所述第二转轴转动的第二电机装置,所述第一电机装置、所述第二电机装置分别包括电机及对应的电机驱动器。
8.座舱位置调节方法,应用于权利要求1-7任一所述儿童推车,其特征在于,包括步骤:
9.如权利要求8所述的座舱位置调节方法,其特征在于:在所述座舱姿态分析步骤中,所述控制模块预设有一关于所述座舱的正常位置区间[-q,q],当所述座舱的姿态变化数据处于该正常位置区间内时,所述控制模块判定所述座舱的位置未发生大幅变化,当所述座舱的姿态变化数据超出该正常位置区间时,所述控制模块判定所述座舱的位置发生大幅变化。
10.如权利要求8所述的座舱位置调节方法,其特征在于:在所述座舱姿态分析步骤中,如所述控制模块判断出所述座舱的位置仅围绕所述第一转轴发生大幅变化,则对第一电机装置下发控制信号,所述第一电机装置驱动所述座舱围绕所述第一转轴转动复位,如所述控制模块判断出所述座舱的位置仅围绕所述第二转轴发生大幅变化,则对第二电机装置下发控制信号,所述第二电机装置驱动所述座舱围绕所述第二转轴转动复位,如所述控制模块判断出所述座舱的位置同时围绕所述第一转轴与所述第二转轴发生大幅变化,则同时对第一电机装置和第二电机装置下发控制信号,以驱动所述座舱围绕所述第一转轴和所述第二转轴转动复位。
技术总结
本申请公开了儿童推车及座舱位置调节方法,属推车技术领域,推车包括车架、与车架活动连接并能够相对车架围绕两个方向转动设置的座舱、适于采集座舱的姿态变化数据的检测模块、与检测模块通信连接的控制模块及与控制模块通信连接的驱动模块,控制模块分析座舱姿态变化数据并通过驱动模块驱动座舱转动复位,对应的座舱位置调节方法包括步骤座舱姿态检测、座舱姿态分析、座舱姿态调整。具有座舱根据路况自适应旋转,推车重心稳定,不易前倾、侧翻,儿童乘坐的舒适度及安全性高的特点。
技术研发人员:陈柳侃,陈文欣,陈聪,王友平
受保护的技术使用者:宁波宝贝第一母婴用品有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!