电力铁塔攀爬设备和攀爬作业机器人的制作方法
本发明属于电力辅助设备,具体涉及一种电力铁塔攀爬设备和攀爬作业机器人。
背景技术:
1、电力铁塔是输电线路架设最常见的基础设施之一,目前在电力铁塔上进行作业操作通常采用人工作业方式,例如负重攀登运送设备、线路安装、高空检修等作业操作。但是,由于人工作业劳动强度大,作业效率低,且存在安全隐患。现有技术中提供了一些可以实现攀爬的机械设备,例如电磁吸附式攀爬机构、步进式攀爬机构等,但上述机械设备要求环境比较规则(例如梁柱结构),或者仅能够在较为平坦的表面上移动,识别和跨越障碍物的能力相对较差,不适于在电力铁塔上复杂的三维立体空间结构中应用,而且难以与电力铁塔的角钢结构相配合,因而难以实现在电力铁塔上的正常行走和作业操作。
技术实现思路
1、有鉴于此,为改善现有技术中存在的上述问题,本发明提供了一种电力铁塔攀爬设备和攀爬作业机器人。
2、本发明提供了一种电力铁塔攀爬设备,包括:运动组件,包括具有多个转动自由度的转动臂机构,转动臂机构的两端均设有适于夹紧电力铁塔的夹爪机构,转动臂机构适于带动夹爪机构沿水平方向和竖直方向转动以进行攀爬行走,且转动臂机构上设有适于装配作业机构的安装接口;控制系统,与运动组件通信连接,控制系统适于控制运动组件进行攀爬动作并越过障碍物。
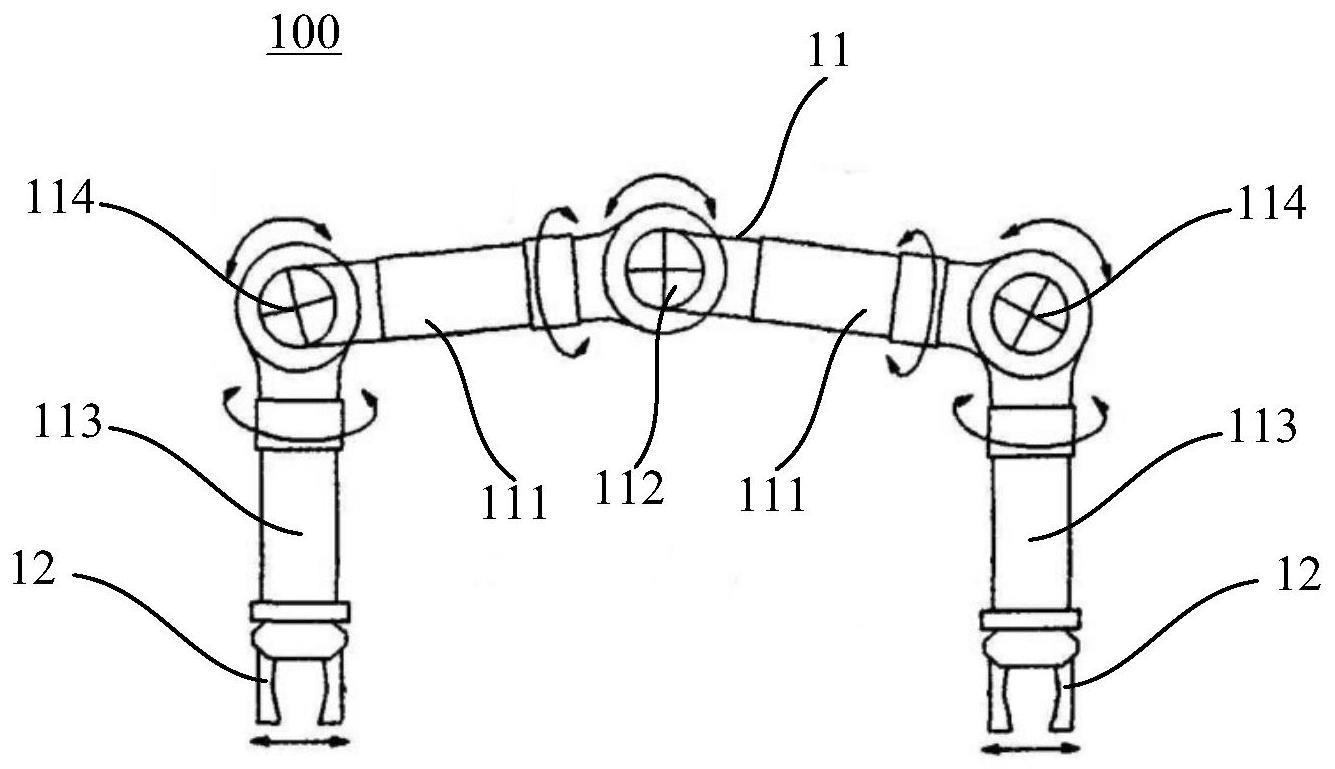
3、在一种可行的实现方式中,转动臂机构包括:可转动连接的两个第一转动臂,且每个第一转动臂自身均可扭转;第一转动驱动件,与两个第一转动臂传动连接,用于驱动两个第一转动臂相对转动;两个第二转动臂,分别与两个第一转动臂转动连接,且每个第二转动臂自身均可扭转;两个第二转动驱动件,分别与两个第二转动臂传动连接,以分别驱动两个第二转动臂转动;其中,每个第二转动臂远离对应的第一转动臂的一端连接有一个夹爪机构。
4、在一种可行的实现方式中,第一转动臂包括:第一转动内筒,一端与另一个第一转动臂的第一转动内筒铰接;第一转动外筒,与对应的第一转动内筒同轴设置,并与第一转动内筒转动连接,第一转动外筒适于相对于第一转动内筒进行扭转运动,且第一转动外筒的扭转轴线与第一转动内筒的转动轴线相互垂直;第一扭转驱动件,与第一转动外筒传动连接,用于驱动第一转动外筒扭转。
5、在一种可行的实现方式中,第二转动臂包括:第二转动内筒,一端与对应的第一转动外筒远离第一转动内筒的一端铰接,且与第二转动驱动件传动连接;第二转动外筒,与对应的第二转动内筒同轴设置,并与第二转动内筒远离第一转动外筒的一端转动连接,第二转动外筒适于相对于第二转动内筒进行扭转运动,且第二转动外筒的扭转轴线与第二转动内筒的转动轴线相互垂直,第二转动外筒远离第二转动内筒的一端与夹爪机构连接;第二扭转驱动件,与第二转动外筒传动连接,用于驱动第二扭转驱动件相对于第二转动内筒扭转。
6、在一种可行的实现方式中,夹爪机构包括:夹爪本体,与第二转动外筒连接,且夹爪本体与电力铁塔相适配;夹爪驱动件,与夹爪本体传动连接,用于驱动夹爪本体张开或夹紧电力铁塔。
7、在一种可行的实现方式中,控制系统包括:信息采集装置,设于运动组件上,用于采集运动组件周围的物体信息;控制器,与信息采集装置和运动组件通信连接,控制器能够根据物体信息判断运动组件的周围的电力铁塔以及障碍物的位置,并控制运动组件进行相应攀爬动作,以越过障碍物。
8、在一种可行的实现方式中,信息采集装置包括:超声波传感装置,设于运动组件上,用于输出和接收超声波信号,以获取运动组件周围的物体信息;和/或光电传感装置,设于运动组件上,用于输出和接收光电信号,以获取运动组件周围的物体信息。
9、在一种可行的实现方式中,信息采集装置包括:摄像装置,设于运动组件上,用于获取运动组件周围的物体影像信息,摄像装置与控制器通信连接;控制系统还包括:远程控制终端,与控制器通信连接,远程控制终端设有显示器和操作界面,显示器适于显示运动组件周围的物体影像信息,操作界面适于输入相对于运动组件的控制指令。
10、在一种可行的实现方式中,控制系统还包括:电源装置,与运动组件、信息采集装置和控制器电连接,电源装置设有充电接口。
11、本发明第二方面的技术方案中提供了一种攀爬作业机器人,上述第一方面任一项的电力铁塔攀爬设备;作业机构,连接于电力铁塔攀爬设备的运动组件上,作业机构适于在电力铁塔上进行作业操作。
12、本发明的上述技术方案的有益效果:
13、能够适应电力铁塔上复杂的环境,适于在三维空间结构中进行攀爬行走,并能够有效识别电力铁塔上的障碍物,并对攀爬行走操作进行相应的调整,实现越障行走,从而适应各种复杂的环境;当装配有作业机构时能够代替人工进行高空攀爬作业操作,并可大幅提高作业操作的效率,降低安全隐患。
技术特征:
1.一种电力铁塔攀爬设备,其特征在于,包括:
2.根据权利要求1所述的电力铁塔攀爬设备,其特征在于,
3.根据权利要求2所述的电力铁塔攀爬设备,其特征在于,
4.根据权利要求3所述的电力铁塔攀爬设备,其特征在于,
5.根据权利要求4所述的电力铁塔攀爬设备,其特征在于,
6.根据权利要求1至5中任一项所述的电力铁塔攀爬设备,其特征在于,
7.根据权利要求6所述的电力铁塔攀爬设备,其特征在于,
8.根据权利要求6所述的电力铁塔攀爬设备,其特征在于,
9.根据权利要求6所述的电力铁塔攀爬设备,其特征在于,
10.一种攀爬作业机器人,其特征在于,包括:
技术总结
本发明属于电力辅助设备技术领域,具体涉及一种电力铁塔攀爬设备和攀爬作业机器人。电力铁塔攀爬设备包括:运动组件,包括具有多个转动自由度的转动臂机构,转动臂机构的两端均设有适于夹紧电力铁塔的夹爪机构,转动臂机构适于带动夹爪机构沿水平方向和竖直方向转动以进行攀爬行走,且转动臂机构上设有适于装配作业机构的安装接口;控制系统,与运动组件通信连接,控制系统适于控制运动组件进行攀爬动作并越过障碍物。通过本发明的技术方案,能够适应电力铁塔上复杂的结构环境,并在三维空间中进行攀爬行走,并能够有效识别和跨越障碍物,实现越障行走;适于代替人工进行高空攀爬以及相应的作业操作,可大幅提高作业效率,降低安全隐患。
技术研发人员:张霄龙,马利群,韩强,刘宇,赵燃,魏明,田志杰,马靖涵
受保护的技术使用者:国网河北省电力有限公司邯郸供电分公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!