一种风电塔筒螺栓维护机器人的行走机构的制作方法
本发明涉及风力发电,尤其涉及一种风电塔筒螺栓维护机器人的行走机构。
背景技术:
1、螺栓连接具有工艺要求较低、结构简单和装拆方便特点,且其结构可靠,强度高,是应用极为广泛的一类机械零件。在各种机械、设备、车辆、船舶、铁路、桥梁、建筑、结构、工具、仪器、仪表和用品等上面都可以看到各式各样的螺栓。对于重大工程及重型机械设备而言,螺栓的检测防松问题已经成为全世界范围内的重大科学瓶颈。特别是对于中大型风力发电机组而言,其所使用的螺栓数量十分巨大,且通常在位置狭小且不易检查的位置,抑或在风险较高的危险处;另外,风力发电机组因为长期工作在野外、暴晒和雷雨等恶劣环境中,其损坏率高达40~50%,同时由于风力发电设备的维护技术跟不上风力发电的发展速度,一旦其关键零部件(如齿轮、轴承、叶片等)发生故障,将会使设备损坏、发电机停机,带来严重的经济损失。因此,为保证风力发电系统可靠稳定运行,降低系统的维护成本,保证风电塔筒的每个螺栓都处在标准扭矩范围内是十分必要的。
2、风电塔筒的侧壁底部一般向外倾斜设置,风电塔筒的内侧壁设置有环绕塔筒的紧固平台,而紧固螺栓则间隔均匀地围绕于紧固平台的顶部。以往,国内的风力发电企业通过人工攀爬来逐一检测紧固螺栓,而人员攀爬检测主要采取简单的扳手检测,检测难度大风险高,效率低。此外,由于是人工检测,其效率和精度都难以保障,且受天气的客观因素影响较大,受环境及工程技术人员水平限制,检测及紧固质量难以保证。
3、为了解决人工检测带来的效率和安全问题,一些风力发电企业研制出用于实现风力发电机组塔筒螺栓快速紧固的作业装置,而现有的螺栓紧固装置一般包括行走机构和紧固机构,其中,行走机构用于令紧固机构能够沿风电塔筒的内侧壁移动,紧固机构用于拧紧位于紧固平台的螺栓。
4、由于风电塔筒的内侧壁倾斜,且紧固平台所能提供的行走空间较窄,因此,现有的螺栓紧固装置容易存在行走不稳和易偏离预定行走轨道的技术问题,为了解决上述问题,现有技术一般会在行走机构中增设磁吸轮,令螺栓紧固装置在行走过程中,磁吸轮始终与风电塔筒的内侧壁相互接触,从而避免上述技术问题的发生。但现有螺栓紧固装置对磁吸轮的吸力等参数要求十分严格,一方面要防止吸力过大,影响螺栓紧固装置的正常行走,另一方面要防止吸力过小,无法有效抵消螺栓紧固装置整体往外偏移的情况。此外,磁吸轮的存在并不能很好地解决螺栓紧固装置往外偏移的问题,若螺栓紧固装置的体积过大、结构过重或结构设计重心偏移等,即使在装置中增设磁吸轮,仍会存在往外偏移,甚至下坠脱离紧固平台的风险。
技术实现思路
1、本发明的目的在于提出一种风电塔筒螺栓维护机器人的行走机构,能有效解决现有螺栓紧固装置存在的行走不稳和易脱离预定行走轨道的技术问题,以克服现有技术中的不足之处。
2、为达此目的,本发明采用以下技术方案:
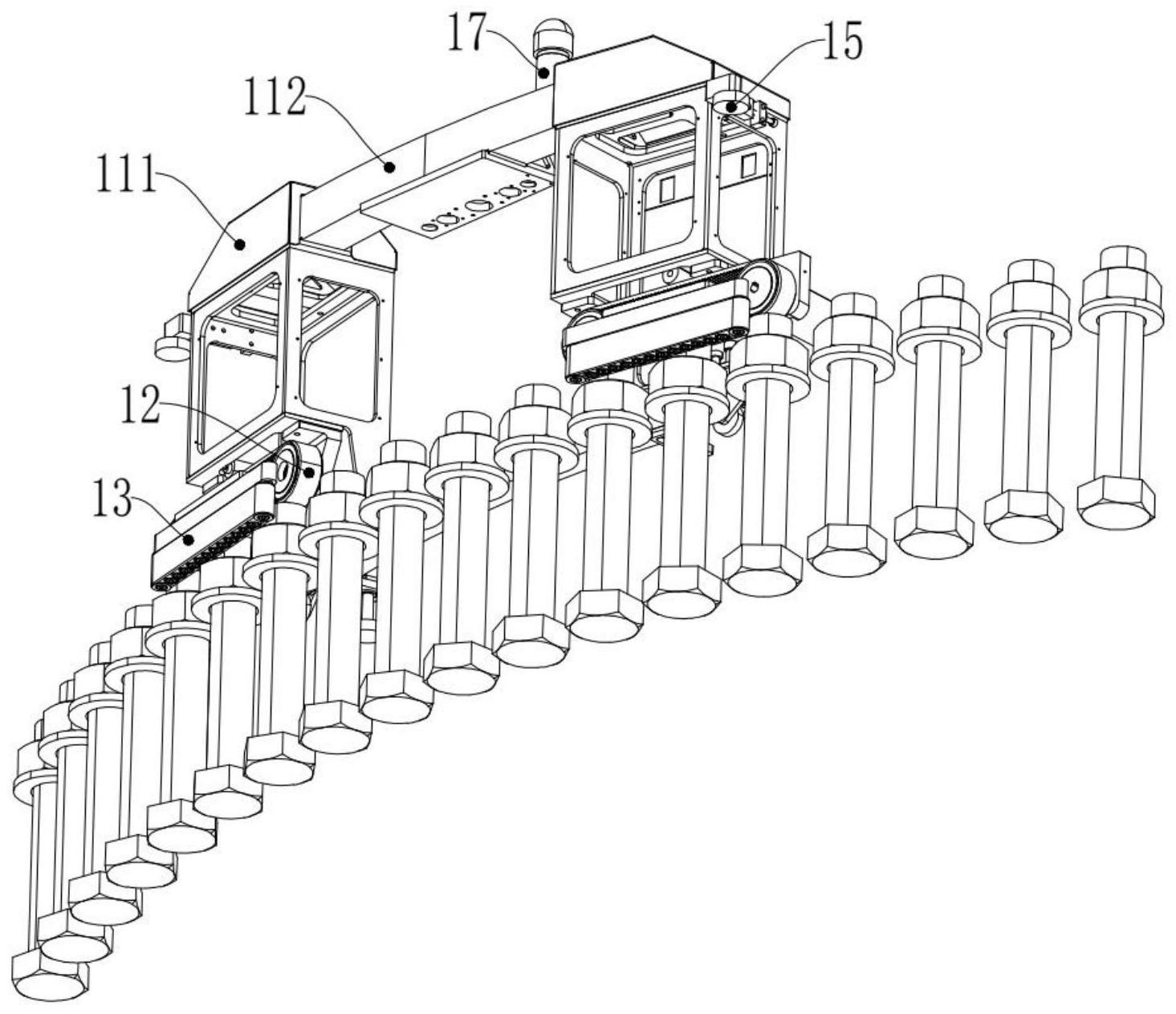
3、一种风电塔筒螺栓维护机器人的行走机构,包括行走座、行走组件和导向组件,所述行走组件和所述导向组件均安装于所述行走座的底部,所述行走组件的行走面与螺栓的螺杆的上表面相抵,所述导向组件位于风电塔筒和所述行走组件之间,且所述导向组件的导向面与螺杆的侧壁相抵。
4、优选的,所述行走组件包括行走轮和行走履带,所述行走轮可转动地安装于所述行走座的底部两侧,且所述行走轮的转动轴水平设置,所述行走履带环绕于两所述行走轮的外侧,且所述行走履带的下行段的底面为行走面,所述行走轮的转动带动所述行走履带的转动;
5、所述行走履带的长度大于相邻两螺杆之间的距离。
6、优选的,所述行走组件还包括行走辅助轮,且所述行走辅助轮的直径小于所述行走轮的直径;
7、所述行走辅助轮设置有多个,多个所述行走辅助轮可转动地安装于所述行走座的底部并排列设置于两所述行走轮之间,所述行走辅助轮的底部与所述行走履带的下行段的顶面相抵。
8、优选的,所述行走组件还包括张紧轮和行走驱动器;
9、所述张紧轮可拆卸地安装于所述行走座的底部,且所述张紧轮可相对于所述行走座上下移动和转动;所述张紧轮位于所述行走履带的顶部,且所述张紧轮的侧壁与所述行走履带的上行段的顶面相抵;
10、所述行走驱动器安装于所述行走座的底部,且所述行走驱动器的输出端与任意一所述行走轮相连,所述行走驱动器用于驱动所述行走轮的转动。
11、优选的,所述导向组件包括连接座、导向轮和导向履带,所述连接座安装于所述行走座,所述导向轮设置有多个,多个所述导向轮可转动地排列安装于所述连接座的底部,且所述导向轮位于螺栓的螺母的上方;所述导向轮的转动轴竖直设置,所述导向履带环绕于所述导向轮的外侧,所述导向履带中靠近所述行走组件的侧面为导向面;
12、所述导向履带的长度大于相邻两螺杆之间的距离。
13、优选的,所述连接座包括限位板和安装条,所述限位板水平设置,且所述限位板架设于所述行走履带之间,所述安装条安装于所述限位板中靠近风电塔筒的一侧,且所述安装条的延伸方向与所述行走履带的延伸方向相互平行。
14、优选的,还包括导向辅助轮,所述导向辅助轮可转动地安装于所述行走座的底部,所述导向辅助轮的转动轴竖直设置,且所述导向辅助轮的转动面与紧固平台的侧壁相抵。
15、优选的,还包括第一支撑轮和第二支撑轮;
16、所述第一支撑轮可转动地安装于所述行走座的上部,所述第一支撑轮的转动轴竖直设置,且所述第一支撑轮的转动面与风电塔筒的侧壁相抵;
17、所述第二支撑轮可转动地安装于所述行走座的底部,所述第二支撑轮的转动轴水平设置,且所述第二支撑轮的转动面与紧固平台的上表面相抵。
18、优选的,所述行走座包括安装座和连接支架,所述连接支架突出安装于所述安装座的侧壁;
19、所述行走机构设置有两组,一所述行走机构的连接支架与另一所述行走机构的连接支架相互连接,且两所述行走机构之间留有用于容纳紧固机构的容纳空间。
20、优选的,还包括定位传感器和指示器;
21、所述定位传感器安装于所述行走座,且所述定位传感器电联接于所述行走驱动器;
22、所述指示器安装于所述连接支架,且所述指示器电联接于所述行走驱动器。
23、本发明实施例提供的技术方案可以包括以下有益效果:
24、本方案设计了一种以螺栓中螺杆的顶端作为行走轨道的行走机构,以解决现有螺栓紧固装置行走不稳和易偏离预定行走轨道的技术问题;同时,为避免行走机构在螺杆的顶端行走时发生偏离,还特别在行走机构中增设了导向组件,以实现螺栓维护机器人的防偏、防脱作用。通过行走机构中行走组件和导向组件的配合,不仅能有效解决现有螺栓紧固装置行走不稳和易偏离预定行走轨道的技术问题,而且还充分利用紧固平台上的窄小空间,创新地以螺杆的顶端作为行走轨道,使螺栓维护机器人的行走重点往风电塔筒的内侧壁偏移,从而更进一步地避免作业机器在行走过程中偏离行走轨道,极大地降低了螺栓维护机器人的下坠风险。
技术特征:
1.一种风电塔筒螺栓维护机器人的行走机构,其特征在于:包括行走座、行走组件和导向组件,所述行走组件和所述导向组件均安装于所述行走座的底部,所述行走组件的行走面与螺栓的螺杆的上表面相抵,所述导向组件位于风电塔筒和所述行走组件之间,且所述导向组件的导向面与螺杆的侧壁相抵。
2.根据权利要求1所述的一种风电塔筒螺栓维护机器人的行走机构,其特征在于:所述行走组件包括行走轮和行走履带,所述行走轮可转动地安装于所述行走座的底部两侧,且所述行走轮的转动轴水平设置,所述行走履带环绕于两所述行走轮的外侧,且所述行走履带的下行段的底面为行走面,所述行走轮的转动带动所述行走履带的转动;
3.根据权利要求2所述的一种风电塔筒螺栓维护机器人的行走机构,其特征在于:所述行走组件还包括行走辅助轮,且所述行走辅助轮的直径小于所述行走轮的直径;
4.根据权利要求3所述的一种风电塔筒螺栓维护机器人的行走机构,其特征在于:所述行走组件还包括张紧轮和行走驱动器;
5.根据权利要求1所述的一种风电塔筒螺栓维护机器人的行走机构,其特征在于:所述导向组件包括连接座、导向轮和导向履带,所述连接座安装于所述行走座,所述导向轮设置有多个,多个所述导向轮可转动地排列安装于所述连接座的底部,且所述导向轮位于螺栓的螺母的上方;所述导向轮的转动轴竖直设置,所述导向履带环绕于所述导向轮的外侧,所述导向履带中靠近所述行走组件的侧面为导向面;
6.根据权利要求5所述的一种风电塔筒螺栓维护机器人的行走机构,其特征在于:所述连接座包括限位板和安装条,所述限位板水平设置,且所述限位板架设于所述行走履带之间,所述安装条安装于所述限位板中靠近风电塔筒的一侧,且所述安装条的延伸方向与所述行走履带的延伸方向相互平行。
7.根据权利要求1所述的一种风电塔筒螺栓维护机器人的行走机构,其特征在于:还包括导向辅助轮,所述导向辅助轮可转动地安装于所述行走座的底部,所述导向辅助轮的转动轴竖直设置,且所述导向辅助轮的转动面与紧固平台的侧壁相抵。
8.根据权利要求1所述的一种风电塔筒螺栓维护机器人的行走机构,其特征在于:还包括第一支撑轮和第二支撑轮;
9.根据权利要求4所述的一种风电塔筒螺栓维护机器人的行走机构,其特征在于:所述行走座包括安装座和连接支架,所述连接支架突出安装于所述安装座的侧壁;
10.根据权利要求9所述的一种风电塔筒螺栓维护机器人的行走机构,其特征在于:还包括定位传感器和指示器;
技术总结
本发明涉及风力发电技术领域,公开了一种风电塔筒螺栓维护机器人的行走机构,包括行走座、行走组件和导向组件,所述行走组件和所述导向组件均安装于所述行走座的底部,所述行走组件的行走面与螺栓的螺杆的上表面相抵,所述导向组件位于风电塔筒和所述行走组件之间,且所述导向组件的导向面与螺杆的侧壁相抵。本方案提出的一种风电塔筒螺栓维护机器人的行走机构,能有效解决现有螺栓紧固装置存在的行走不稳和易脱离预定行走轨道的技术问题,以克服现有技术中的不足之处。
技术研发人员:黄斌斌,梁浩铭,陈云峰,史锋
受保护的技术使用者:广东科凯达智能机器人有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!