双足机器人、人形机器人,机器人的制作方法
本申请属于机器人,涉及一种双足机器人、人形机器人,机器人。
背景技术:
1、在机器人技术中,仿人形的双足机器人是机器人领域重要的类型。在双足机器人中,腿结构均包括大腿、小腿、足,以及相应的关节模组或者推杆等致动装置,通过关节模组或者推杆相互配合,驱动大腿、小腿、足转动或者摆动,完成和人动作相仿的行走运动。
2、在现有相关技术中,如公开号为cn114030537a、公开日为2022.02.11、专利名称为一种双足机器人的专利申请,其包括腿结构的大腿、小腿、足及包括大腿关节、摆腿关节以及为双电动推杆机构的膝关节驱动模组和踝关节驱动模组。可见,其虽能实现双足行走,但为采用关节模组和电动推杆机构配合作为机器人行走致动部分,以至于该机器人产品结构复杂,仿生程度不高,拆装维护较为困难。
3、如公开号为cn116001945a、公开日为2023.04.25、专利名称为腿结构及双足机器人的专利申请,其包括腿结构的大腿、小腿、足以及包括大腿关节、小腿关节、摆腿关节、转腿关节和足关节在内共六个关节模组。其虽能实现双足行走,但关节模组较多,控制难度较大,行走能耗较高。并且,其为搭载六个关节模组,其也存在构造复杂,仿生程度不高,拆装维护困难的问题。
4、由此可知,相关技术中的双足机器人由于如关节模组、电动推杆机构设置较多,存在控制难度大、能耗高,且结构复杂不易拆装维护的问题。
技术实现思路
1、本申请提供了一种双足机器人、人形机器人,机器人,旨在解决现有技术中的双足机器人控制难度大、能耗高,且结构复杂不易拆装维护的问题。
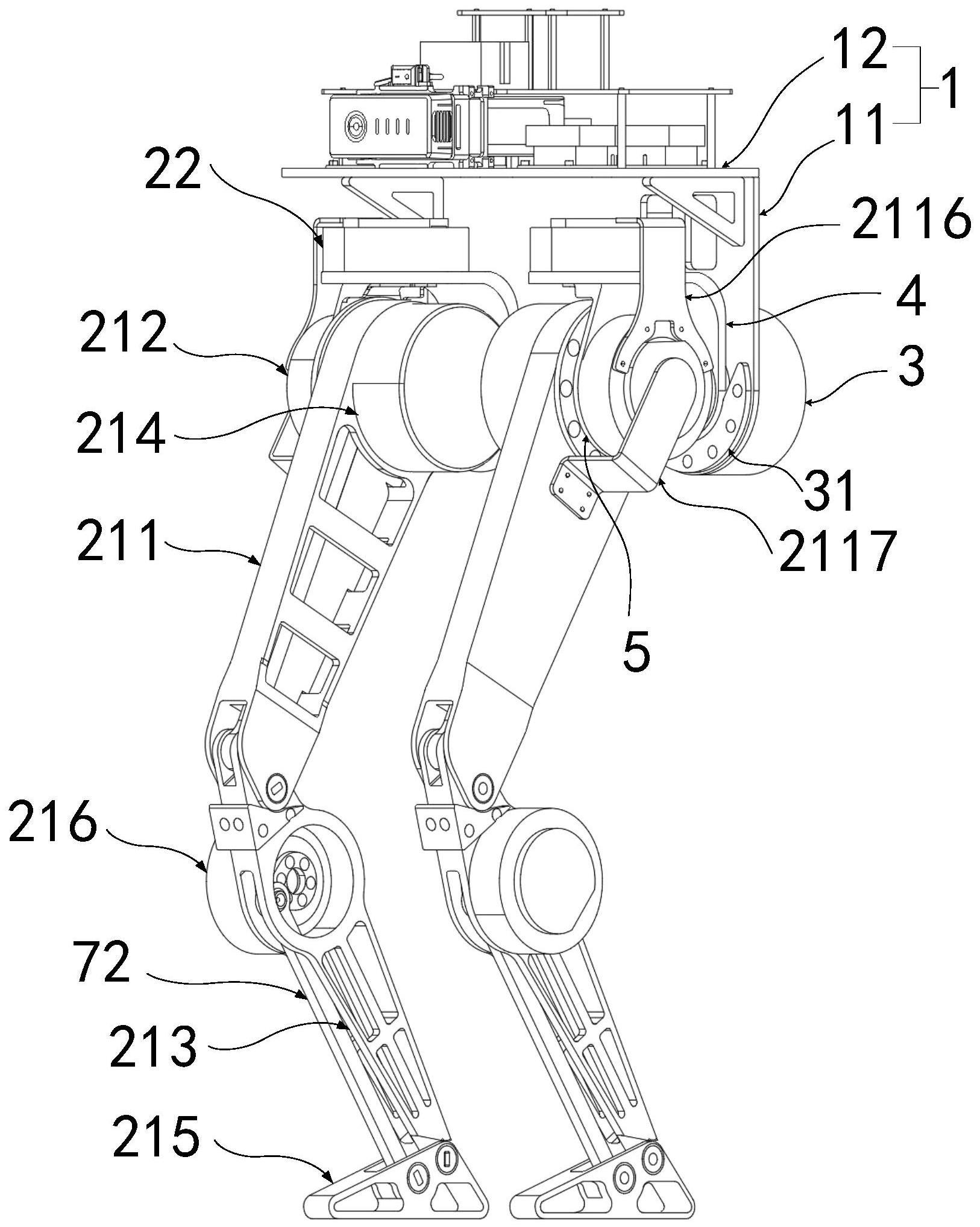
2、在一个方案中,本申请提供了一种双足机器人,包括机身、镜像对称布置在所述机身一侧两个腿组件,及固定设置在所述机身相对于所述腿组件的另一侧的摆腿关节;所述摆腿关节具有一沿水平方向的摆腿转动轴,所述摆腿关节用于驱动所述腿组件绕所述摆腿转动轴摆动;所述腿组件包括腿结构和转腿关节;所述转腿关节一沿竖直方向的转腿转动轴,所述转腿关节用于驱动所述腿结构绕所述转腿转动轴转动;所述腿结构包括大腿及驱动所述大腿转动的大腿关节、小腿及驱动所述小腿转动的小腿关节,以及足和一个用于驱动所述足、改变所述足与所述小腿之间夹角的足关节。
3、在一个方案中,将所述腿组件以所述摆腿转动轴所在水平面为界,划分为具有上质点的上质量部分和具有下质点的下质量部分,所述上质点的质量大于零,且小于或等于所述下质点的质量;所述摆腿转动轴到所述上质点的距离为上力臂,所述摆腿转动轴到所述下质点的距离为下力臂,所述上力臂的长度大于零,且小于或等于所述下力臂的长度;所述上质量部分与所述下质量部分以所述摆腿转动轴为轴同步反向摆动,摆动过程中至少部分所述上质量部分位于所述摆腿转动轴所在水平面之上。
4、在一个方案中,所述大腿关节设置于所述大腿相对于所述小腿的一端的一侧;所述小腿关节设置于所述大腿相对于所述小腿的一端,且相对于所述大腿关节的另一侧,所述的小腿关节与所述大腿关节在竖直方向上的高度一致;所述足关节设置于所述小腿靠近所述大腿的一端上,且与所述大腿关节同侧;其中,所述大腿关节与所述足关节的质量之和不小于所述小腿关节的质量的60%,且不大于所述小腿关节的质量的140%。
5、在另一方案中,本申请提供了一种人形机器人,包括上述的双足机器人,作为下肢。
6、在另一方案中,本申请提供了一种机器人,包括上述的人形机器人。
7、本申请的有益效果:
8、本申请的双足机器人通过合理布置机身、腿组件及各关节模组,整体结构简洁轻便,行走时易于控制、能耗低,也利于拆装和后期的维护保养。
技术特征:
1.一种双足机器人,其特征在于,包括:
2.根据权利要求1所述的双足机器人,其特征在于:
3.根据权利要求2所述的双足机器人,其特征在于,
4.根据权利要求3所述的双足机器人,其特征在于,
5.根据权利要求4所述的双足机器人,其特征在于,还包括:
6.根据权利要求5所述的双足机器人,其特征在于,
7.根据权利要求6所述的双足机器人,其特征在于,
8.根据权利要求7所述的双足机器人,其特征在于,
9.根据权利要求8所述的双足机器人,其特征在于,还包括:
10.根据权利要求9所述的双足机器人,其特征在于,
11.根据权利要求10所述的双足机器人,其特征在于,
12.根据权利要求5所述的双足机器人,其特征在于,所述摆腿关节连接部相对所述摆腿关节的一端上设置有插接座,所述插接座上构造有插接槽,所述第一承板相对于所述第二承板的一端插设在所述插接槽内,从而使所述第一承板与所述插接座通过插接连接。
13.根据权利要求4所述的双足机器人,其特征在于,
14.根据权利要求13所述的双足机器人,其特征在于,
15.根据权利要求2-14任一项所述的双足机器人,其特征在于,
16.根据权利要求15所述的双足机器人,其特征在于,
17.根据权利要求16所述的双足机器人,其特征在于,所述两个腿组件分为左腿组件和右腿组件;
18.根据权利要求17所述的双足机器人,其特征在于,
19.根据权利要求17所述的双足机器人,其特征在于,
20.根据权利要求17所述的双足机器人,其特征在于,
21.根据权利要求5所述的双足机器人,其特征在于,所述机身包括:
22.根据权利要求21所述的双足机器人,其特征在于,所述机身还包括:
23.根据权利要求21所述的双足机器人,其特征在于,
24.根据权利要求23所述的双足机器人,其特征在于,所述摆腿避让槽的内侧壁在所述摆腿转动轴轴向上的投影呈与所述摆腿关节连接部端面同心的半圆弧形。
25.根据权利要求24所述的双足机器人,其特征在于,两个所述第一摆腿限位面和两个所述第二摆腿限位面均相对于所述摆腿转动轴所在竖直平面对称设置。
26.根据权利要求9所述的双足机器人,其特征在于,所述第二过孔为对应所述转腿关节的输出端法兰的位置设置的圆形通孔,所述第二过孔的孔壁位于环绕所述转腿转动轴的一个圆周面上,所述第二过孔的孔壁上设置有沿所述第二过孔的径向凹陷的转腿限位槽;
27.根据权利要求26所述的双足机器人,其特征在于,通过所述转腿限位槽限定有第一配合面和分别位于所述第一配合面两端处的两个第一转腿限位面,所述第一配合面在所述转腿转动轴轴向上的投影呈与所述第二过孔同心的圆弧状,两个所述第一转腿限位面分别构造在所述第一配合面的两端上且沿所述第一配合面的径向延伸;
28.根据权利要求27所述的双足机器人,其特征在于,在所述转腿转动轴轴向的投影上所述第二配合面的弧长小于所述第一配合面的弧长,在所述转腿限位部嵌入所述转腿限位槽内之后所述第一配合与所述第二配合面同心,所述第一转腿限位面与所述第二转腿限位面在所述转腿关节转动方向上至少部分重叠。
29.根据权利要求28所述的双足机器人,其特征在于,在沿所述第二过孔轴向的投影上两个所述第一转腿限位面之间的夹角为60度~90度。
30.根据权利要求29所述的双足机器人,其特征在于,所述第二过孔的孔壁上构造有相对设置的两个所述转腿限位槽。
31.根据权利要求1所述的双足机器人,其特征在于,
32.根据权利要求31所述的双足机器人,其特征在于,
33.根据权利要求32所述的双足机器人,其特征在于,还包括:
34.根据权利要求33所述的双足机器人,其特征在于,还包括:
35.根据权利要求34所述的双足机器人,其特征在于,所述小腿与所述大腿具有一铰接点,所述小腿摇杆与所述小腿的铰接点位于所述小腿与所述大腿的铰接点在竖直方向上的上方。
36.根据权利要求35所述的双足机器人,其特征在于,
37.根据权利要求36所述的双足机器人,其特征在于,
38.根据权利要求37所述的双足机器人,其特征在于,所述小腿连接部在所述第一小腿连接孔的两侧分别构造有两个平行于所述第一小腿连接孔轴向的第二小腿限位面,两个所述第二小腿限位面之间设置大致呈圆弧形的过渡弧面;
39.根据权利要求38所述的双足机器人,其特征在于,所述大腿避让槽和所述过渡弧面在所述第一小腿连接孔轴向上的投影相同心,且所述过渡弧面的径向尺寸小于所述大腿避让槽的径向尺寸。
40.根据权利要求39所述的双足机器人,其特征在于,所述小腿限位件本体及两个小腿限位部上分别构造有若干个小腿限位部安装孔,所述小腿限位件通过所述若干个小腿限位部安装孔固定在所述大腿连接部上。
41.根据权利要求40所述的双足机器人,其特征在于,所述足传动组件包括第二曲柄和足摇杆;
42.根据权利要求41所述的双足机器人,其特征在于,
43.根据权利要求42所述的双足机器人,其特征在于,
44.根据权利要求43所述的双足机器人,其特征在于,
45.根据权利要求41所述的双足机器人,其特征在于,
46.根据权利要求45所述的双足机器人,其特征在于,在竖直方向上的投影上所述足跟面的面积小于所述足尖面的面积。
47.根据权利要求46所述的双足机器人,其特征在于,所述足的顶部构造有足安装槽,所述足安装槽在竖直方向上的投影分别与所述足跟面和所述足尖面部分重叠,所述第二小腿连接孔与所述足摇杆连接孔对应布置在构造有所述足安装槽的区域上;
48.根据权利要求47所述的双足机器人,其特征在于,所述小腿在靠近所述足连接部的一端上构造有限位凸缘,所述限位凸缘上构造有足限位面,所述足限位面在竖直方向上的投影与所述足尖面至少部分重叠。
49.根据权利要求48所述的双足机器人,其特征在于,所述机身、所述大腿、所述小腿及所述足上分别构造有若干个减重通孔。
50.根据权利要求21所述的双足机器人,其特征在于,所述第一过孔内设有轴承,所述摆腿关节连接部呈圆柱轴状,所述摆腿关节连接部穿过所述轴承的内圈,进而通过所述轴承使所述摆腿关节连接部与所述固定架可转动的连接。
51.根据权利要求50所述的双足机器人,其特征在于,所述摆腿关节连接部外周面上构造有一阶台,所述阶台的侧面抵住所述轴承的内圈的背离所述摆腿关节的一侧;
52.根据权利要求50所述的双足机器人,其特征在于,还包括:
53.根据权利要求50所述的双足机器人,其特征在于,还包括:花键轴,所述花键轴与所述摆腿关节的输出法兰固定连接;
54.根据权利要求53所述的双足机器人,其特征在于,
55.根据权利要求54所述的双足机器人,其特征在于,所述上布线支撑部在垂直于所述大腿关节径向的竖直面上的投影与所述第一架体相垂直;所述上布线支撑部远离所述第一架体的一端向所述转腿关节的上侧延伸;
56.根据权利要求55所述的双足机器人,其特征在于,所述上布线支撑部在相对于所述第一架体的另一端上设置有第一布线避让面,所述转腿关节还具有转腿关节后盖,所述第一布线避让面呈与所述转腿关节后盖外周面相同心的圆弧面,且所述第一布线避让面的内径尺寸大于所述转腿关节后盖的外径尺寸,从而在所述第一布线架跟随所述腿结构转动时,所述第一布线避让面不与所述转腿关节后盖的外周面接触。
57.根据权利要求56所述的双足机器人,其特征在于,所述第一布线固定部包括镜像对称构造在所述第一布线架上的两个第一布线固定块,所述第一布线固定块上构造有第二布线避让面;
58.根据权利要求57所述的双足机器人,其特征在于,所述第二布线固定部安装在所述大腿关节下侧的所述大腿上,所述布线避让部自所述第二布线固定部沿所述大腿关节的轴向朝远离所述大腿的方向延伸,所述布线避让部与所述第二架体在垂直于所述大腿关节径向的竖直面上的投影相垂直,所述第二架体朝靠近所述第一布线架的方向延伸,所述布线避让部与所述第二架体分别与所述大腿关节外壳之间留有间隙,从而在所述第二布线架跟随所述大腿转动时,所述固定部与所述第二架体均不与所述大腿关节外壳接触。
59.根据权利要求58所述的双足机器人,其特征在于,所述第一布线架上的所述第一布线固定部、所述第一架体、及所述上布线支撑部一体成型,所述第二布线架上的所述第二布线固定部、所述布线避让部、及所述第二布线架一体成型。
60.根据权利要求59所述的双足机器人,其特征在于,所述双足机器人的部分电缆依次沿所述布线避让部、所述第二架体、所述第一架体、以及所述上布线支撑部的外表面布置并固定。
61.一种人形机器人,其特征在于,包括权利要求1-60任一项所述的双足机器人,作为下肢。
62.一种机器人,其特征在于,包括权利要求61所述的人形机器人。
技术总结
本申请涉及机器人技术领域,属于机器人技术领域,其包括机身、布置在机身一侧两个腿组件,及固定在另一侧的摆腿关节,摆腿关节具有一沿水平方向的摆腿转动轴,摆腿关节用于驱动腿组件绕摆腿转动轴摆动,腿组件包括腿结构和转腿关节,转腿关节一沿竖直方向的转腿转动轴,转腿关节用于驱动腿结构绕转腿转动轴转动;腿结构包括大腿及驱动大腿转动的大腿关节、小腿及驱动小腿转动的小腿关节,以及足和足关节。本申请的双足机器人通过合理布置机身、腿组件及各关节模组,整体结构简洁轻便,行走时易于控制、能耗低,也利于拆装和后期的维护保养。
技术研发人员:赵国增,陈健,沈悰
受保护的技术使用者:深圳逐际动力科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!