一种基于液态金属相变的变刚度绒毛爬行软体机器人及工作方法
本发明涉及软体机器人的变刚度,具体为一种基于液态金属相变的变刚度绒毛爬行软体机器人及工作方法,主要用于多种非结构化表面运动时均可高速机动。
背景技术:
1、传统机器人一般由刚性零件组成,其运动精度高,并且具有极强的承载能力。在控制方面,它具有方便,稳定的特点。但同时刚性机器人的环境适应能力差,当在狭窄空间内运动时常常会受到限制。科学家们从自然界汲取灵感,使用软体材料制作出远比那些传统机器人更加灵活和多功能的软体机器人。软体机器人具有良好的灵活性、环境适应性,具有广阔的应用前景。
2、但值得注意的是,对于低等生物如尺蠖,水蛭,蛇,甚至寄生虫等在复杂环境下都可以进行有效的运动机制,而现有的软体机器人在这些动物生存的环境中几乎无法动弹。由于软体机器人结构和材质的特殊性,软体机械人柔软性高,易于发生变形,正因为这些特点导致软体机器人的输出力有限,难以完成在多种复杂环境中的操作。为了达到预期的工作效果,科学家们对机器人有着更高的要求,软体机器人不但要易于驱动变形,而且要做到刚度适应可控,在既可以保证与机器人接触时的人身安全的同时,又可以通过改变机器人的自身刚度达到预期的效果,完成一系列任务。因此研究变刚度驱动方法就显得尤为重要。
技术实现思路
1、针对现有技术中存在的不足,本发明提供了一种基于液态金属相变的变刚度绒毛爬行软体机器人及工作方法,本发明中的变刚度足部不但可以使机器人作业于刚性坡面,刚性表面,也可运动于各种特定环境下,如软体海绵表面,多坑洞表面等,且在上述表面运动时,机器人均可保证高速运动。
2、本发明是通过以下技术手段实现上述技术目的的。
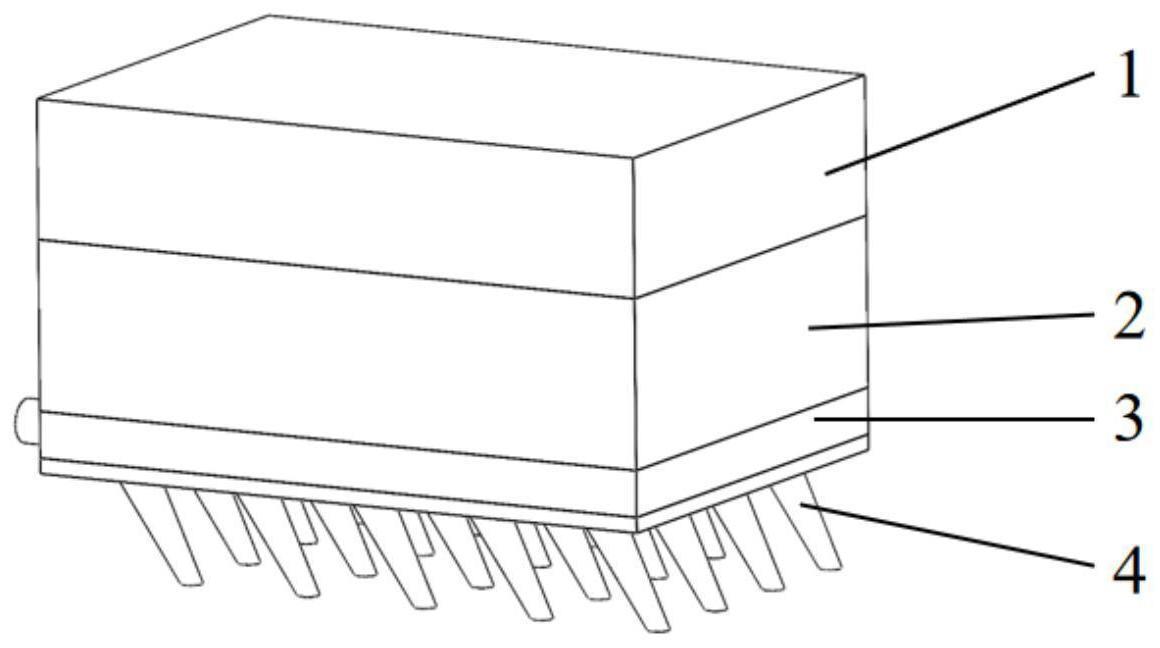
3、一种基于液态金属相变的变刚度绒毛爬行软体机器人,包括控制模块、驱动模块、冷却装置和变刚度足部;所述控制模块用来控制驱动模块的工作及变刚度足部刚度的调控;所述冷却装置用来冷却变刚度足部内部填充物;所述驱动模块用来为变刚度足部提供动能;所述变刚度足部与地面接触并行走。
4、上述方案中,所述驱动模块包括偏心电机和电源;所述控制模块用于控制电源通断、改变电源输出电压的正负极性;所述电源为偏心电机提供电能;所述偏心电机用来为变刚度足部提供动能。
5、上述方案中,所述偏心电机位于机器人质心;所述偏心电机上带有偏心块,偏心电机工作时机器人的运动会发生偏转,通过控制电源输入电压的正负极性改变偏心电机的转向使得运动方向为直行、左转或者右转。
6、上述方案中,所述变刚度足部包括空腔绒毛足部和电阻丝;所述空腔绒毛足部内置电阻丝并填充有镓基液态金属。
7、上述方案中,所述电阻丝呈蛇形布置,电阻丝外侧包裹有硅胶;所述镓基液态金属密封在空腔绒毛足部内部。
8、上述方案中,所述冷却装置设置在变刚度足部上方,所述冷却装置包括冷却管和蠕动泵,所述冷却管外侧包裹有硅胶,蠕动泵将冷却液泵入冷却管内从而冷却变刚度足部。
9、上述方案中,所述冷却管呈蛇形布置。
10、上述方案中,所述控制模块无线接收/发射模块和分压模块;所述分压模块能够对流经的电流进行放大;所述无线接收/发射模块接收信号后用来控制电源的开闭。
11、基于液态金属相变的变刚度绒毛爬行软体机器人的工作方法,无线接收/发射模块接收到开启信号后控制电源开关打开,偏心电机通电工作,带动变刚度足部工作,当机器人运动至刚性坡面时,足部切换至低刚度模式以维持机器人的最佳速度,电流经由分压模块放大后通入电阻丝,电阻丝升温,变刚度足部绒毛内部镓基液态金属由固态转化为液态,变刚度足部绒毛刚度减小,适应爬行机器人在刚性坡面上的爬行;当机器人爬行到较为柔软的软体海绵表面时需要足部调整到高刚度模式,无线发射模块接收到信号后控制电阻丝断电,蠕动泵持续将冷却液注入冷却装置中,变刚度足部绒毛内部镓基液态金属由液态转化为固态;分压模块控制通入电阻丝的电流大小以及足部上表面冷却装置中冷却液的通断,机器人足部便可实现变刚度以匹配不同的运动表面。
12、上述方案中,需要调整机器人运动方向时,控制模块改变电源输出电压的正负极性改变偏心电机的转向,具体为:当无线发射模块控制电源输入电压为正极时,偏心电机上偏心块沿顺时针方向旋转,此时爬行机器人会在前进过程中向右偏转;电源输入电压为负极时,偏心电机上偏心块逆时针方向旋转,此时机器人会向左偏转;当电源输入正负交替的电压时,偏心电机将在顺时针与逆时针之间交替转换,机器人将呈现直线向前爬行运动。
13、有益效果:
14、1.本发明一种基于液态金属相变的变刚度绒毛爬行软体机器人可以通过调节外部电源提供的电流大小来控制镓基液态金属的固、液及中间状态。且当通入的电流值不同时,电阻丝最终稳定的温度值也有所变化,可以以此来控制机器人绒毛足部的刚度。
15、2.本发明软体爬行机器人自身携带动力源,能在相对较小的驱动电压下实现爬行运动。
16、3.本发明软体爬行机器人采用超弹性材料,可以在一定的情况下弯曲和伸展,且可以承受极大的压挤力。
17、4.本发明软体爬行机器人体积小、质量轻,体现了整体结构运动的灵活性和可靠性。
18、5.本发明通过单一执行器实现对机器人运动的控制,且安装了无线收发模块实现远程控制。
19、6.本发明采用锂电池供能,不但可以装备在机器人上,保证自身携带动力源,而且满足机器人在相对较小的驱动电压下实现爬行运动,这极大地降低了该软体机器人的使用局限性。
20、7.本发明机器人拥有可变刚度足部,不仅能够进入狭窄空间,而且还能在相对较小的驱动电压下实现爬行运动,具有体积小、质量轻、控制方便等优势。绒毛足部的刚度是影响该机器人地形适应性的关键因素,通过对可变刚度足部的设计,使得该软体机器人能适应更多复杂工作表面,增强环境适应性。本发明具有重大的应用价值,将在急救机器人技术,工业上的管道检测,日常生活服务,军事侦察,极限作业环境的勘探等领域大放异彩。
21、8.本发明的爬行机器人采用硅胶材料制成具有内部腔体的结构,利用硅胶材料本身具有的变形能力及恢复特性来实现软致动,空腔内部填充镓基液态金属,利用该液态金属自身特性,常温下为固态,加热后相变为液态,有效实现变刚度控制。此爬行机器人不但可以适应多种环境,同时满足在诸多非结构化表面运动时均可高速机动,有效实现环境探索等功能。
技术特征:
1.一种基于液态金属相变的变刚度绒毛爬行软体机器人,其特征在于,包括控制模块(1)、驱动模块(2)、冷却装置(3)和变刚度足部(4);所述控制模块(1)用来控制驱动模块(2)的工作及变刚度足部(4)刚度的调控;所述冷却装置(3)用来冷却变刚度足部(4)内部填充物;所述驱动模块(2)用来为变刚度足部(4)提供动能;所述变刚度足部(4)与地面接触并行走。
2.根据权利要求1所述的基于液态金属相变的变刚度绒毛爬行软体机器人,其特征在于,所述驱动模块(2)包括偏心电机(6)和电源(7);所述控制模块(1)用于控制电源(7)通断、改变电源(7)输出电压的正负极性;所述电源(7)为偏心电机(6)提供电能;所述偏心电机(6)用来为变刚度足部(4)提供动能。
3.根据权利要求2所述的基于液态金属相变的变刚度绒毛爬行软体机器人,其特征在于,所述偏心电机(6)位于机器人质心;所述偏心电机(6)上带有偏心块,偏心电机(6)工作时机器人的运动会发生偏转,通过控制电源(7)输入电压的正负极性改变偏心电机(6)的转向使得运动方向为直行、左转或者右转。
4.根据权利要求1所述的基于液态金属相变的变刚度绒毛爬行软体机器人,其特征在于,所述变刚度足部(4)包括空腔绒毛足部和电阻丝(8);所述空腔绒毛足部内置电阻丝(8)并填充有镓基液态金属。
5.根据权利要求4所述的基于液态金属相变的变刚度绒毛爬行软体机器人,其特征在于,所述电阻丝(8)呈蛇形布置,电阻丝(8)外侧包裹有硅胶;所述镓基液态金属密封在空腔绒毛足部内部。
6.根据权利要求1所述的基于液态金属相变的变刚度绒毛爬行软体机器人,其特征在于,所述冷却装置(3)设置在变刚度足部(4)上方,所述冷却装置(3)包括冷却管和蠕动泵,所述冷却管外侧包裹有硅胶,蠕动泵将冷却液泵入冷却管内从而冷却变刚度足部(4)。
7.根据权利要求6所述的基于液态金属相变的变刚度绒毛爬行软体机器人,其特征在于,所述冷却管呈蛇形布置。
8.根据权利要求1所述的基于液态金属相变的变刚度绒毛爬行软体机器人,其特征在于,所述控制模块(1)无线接收/发射模块和分压模块(5);所述分压模块(5)能够对流经的电流进行放大;所述无线接收/发射模块接收信号后用来控制电源(7)的开闭。
9.根据权利要求1所述的基于液态金属相变的变刚度绒毛爬行软体机器人的工作方法,其特征在于,无线接收/发射模块接收到开启信号后控制电源(7)开关打开,偏心电机(6)通电工作,带动变刚度足部(4)工作,当机器人运动至刚性坡面时,足部切换至低刚度模式以维持机器人的最佳速度,电流经由分压模块(5)放大后通入电阻丝(8),电阻丝(8)升温,变刚度足部(4)绒毛内部镓基液态金属由固态转化为液态,变刚度足部(4)绒毛刚度减小,适应爬行机器人在刚性坡面上的爬行;当机器人爬行到较为柔软的软体海绵表面时需要足部调整到高刚度模式,无线发射模块接收到信号后控制电阻丝(8)断电,蠕动泵持续将冷却液注入冷却装置(3)中,变刚度足部(4)绒毛内部镓基液态金属由液态转化为固态;分压模块(5)控制通入电阻丝(8)的电流大小以及足部上表面冷却装置(3)中冷却液的通断,机器人足部便可实现变刚度以匹配不同的运动表面。
10.根据权利要求9所述的基于液态金属相变的变刚度绒毛爬行软体机器人的工作方法,其特征在于,需要调整机器人运动方向时,控制模块(1)改变电源(7)输出电压的正负极性改变偏心电机(6)的转向,具体为:当无线发射模块控制电源(7)输入电压为正极时,偏心电机(6)上偏心块沿顺时针方向旋转,此时爬行机器人会在前进过程中向右偏转;电源(7)输入电压为负极时,偏心电机(6)上偏心块逆时针方向旋转,此时机器人会向左偏转;当电源(7)输入正负交替的电压时,偏心电机(6)将在顺时针与逆时针之间交替转换,机器人将呈现直线向前爬行运动。
技术总结
本发明公开了一种基于液态金属相变的变刚度绒毛爬行软体机器人及工作方法,涉及软体机器人的变刚度技术领域,包括控制模块、驱动模块、冷却装置和变刚度足部;所述控制模块用来控制驱动模块的工作及变刚度足部刚度的调控;所述冷却装置用来冷却变刚度足部内部填充物;所述驱动模块用来为变刚度足部提供动能;所述变刚度足部与地面接触并行走。本发明中的变刚度足部不但可以使机器人作业于刚性坡面,刚性表面,也可运动于各种特定环境下,如软体海绵表面,多坑洞表面等,且在上述表面运动时,机器人均可保证高速运动。
技术研发人员:张忠强,杨冰莹,董步升,丁建宁,张福建,程广贵
受保护的技术使用者:江苏大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!