一种链带式腿部动作机构的制作方法
本发明属于仿生机器人,特别涉及一种链带式腿部动作机构。
背景技术:
1、相对轮式、履带式移动机器人,仿生机器人运动时只需离散的点接触地面,可跨越较大的障碍,对复杂地形适应能力更强,且仿生机器人的腿部可具有多个自由度,使运动灵活性和表演性大大增强,可通过调节支撑腿角度和足部落点位置保持身体平衡,不易倾翻,稳定性高。未来,仿生机器人将在生活服务、管道检修、抗洪救灾、影视表演、安保及军事等方面具有更为广阔的应用前景。
2、申请号为cn202122138157.9的专利公布了一种仿生机器人腿部结构。该结构包括壳体、腿部构件和转轴,壳体设有容纳腔和与其连通的避让口;腿部构件包括小腿杆和位于容纳腔内的大腿杆,小腿杆一端固连有足端,另一端设有第一转轴孔,且穿过避让口伸入容纳腔;转轴贯穿容纳腔,壳体通过转轴与小腿杆铰接,避让口两侧长度方向均与转轴相同,转轴分别与避让口两侧连线的夹角小于第一阈值角度;大腿杆通过第一转轴孔与小腿杆铰接,第一转轴孔与转轴长度方向相同,转轴与足端连线和转轴与第一转轴孔连线夹角小于第二阈值角度。通过对壳体与腿部构件的调整与改进,使大腿杆设于容纳腔内,小腿杆部分伸入容纳腔,从而提高防护效果,降低安全隐患。
3、人体大腿可进行前后摆动和左右摆动,或者前后摆动和左右摆动的复合运动。而上述专利的驱动组件组能驱动大腿前后摆动,无法模拟人体的左右摆动或复合运动,其仿生性较差。
技术实现思路
1、为了解决现有技术存在的上述问题,本发明的目的在于提供一种可进行前后摆动、左右摆动或二者复合运动的链带式腿部动作机构。
2、本发明所采用的技术方案为:
3、一种链带式腿部动作机构,包括左右摆动动力源,左右摆动动力源的输出端连接有腰部固定端,左右摆动动力源的壳体上转动连接有支撑连杆,还包括大腿基体,支撑连杆的另一端与大腿基体固定,大腿基体上安装有前后摆动动力源,前后摆动动力源的输出端设置有输出固定盘,左右摆动动力源的壳体上固定有驱动固定盘,输出固定盘与驱动固定盘之间通过钢带传动连接。
4、本发明的左右摆动动力源动作时,左右摆动动力源的壳体带动整个腿部相对于腰部固定端左右摆动。当前后摆动动力源动作时,钢带驱动驱动固定盘相对于支撑连杆转动,前后摆动动力源的作用力反作用于自身并传递到大腿基体,从而推动大腿基体转动,进而实现腿部的前后摆动。左右摆动动力源和前后摆动动力源同时工作时,大腿做前后摆动和左右摆动的复合运动。本发明能模拟人体大腿真实的前后摆动、左右摆动或二者复合运动,其仿生性较高,且结构简单。
5、作为本发明的优选方案,所述支撑连杆的数量为两根,两根支撑连杆分别与左右摆动动力源的壳体的两侧转动连接。两根支撑连杆分别支撑左右摆动动力源的两侧,减小单侧支撑力,从而大腿的支撑更加平稳。
6、作为本发明的优选方案,所述大腿基体与其中一根支撑连杆之间固定有支撑板,支撑板的一侧将钢带压紧,支撑板压紧钢带的一侧的形状为弧形。支撑板能将钢带往一侧压紧,可节省一侧的空间,大腿基体外部包裹模拟皮肤后,其外形更接近于真人。支撑板将钢带压紧,可钢带张紧,保证传动可靠。
7、作为本发明的优选方案,所述驱动固定盘的中心与支撑连杆的转动中心共线。钢带对驱动固定盘的力矩中心位于支撑连杆的转动中心,可使力臂最大,方便对大腿基体进行可靠驱动。
8、作为本发明的优选方案,所述钢带分别与输出固定盘和驱动固定盘固定。钢带分别与输出固定盘和驱动固定盘固定,避免钢带打滑,保证传动精度。
9、作为本发明的优选方案,所述左右摆动动力源和前后摆动动力源均包括谐波减速电机,谐波减速电机包括中心轴,中心轴上连接有电机定子,电机定子上套设有电机转子,电机转子连接有谐波减速单元,谐波减速单元的输出端与中心轴转动连接,谐波减速单元的输出端齿啮合有谐波刚轮;所述支撑连杆与左右摆动动力源的谐波刚轮转动连接,驱动固定盘固定于左右摆动动力源的谐波刚轮上,左右摆动动力源的谐波刚轮和左右摆动动力源的中心轴相对固定;所述前后摆动动力源的谐波刚轮和前后摆动动力源的中心轴均固定于大腿基体上。
10、谐波减速单元的输出端的转速相对于凸轮的转速大幅降低,使得谐波减速电机的输出端稳定且低速输出。谐波减速单元与谐波刚轮齿啮合,从而谐波减速电机的输出端相对于凸轮具有较高的传动精度。谐波减速单元的输出端与中心轴转动连接,使得谐波减速单元的输出端得到稳定支撑。
11、作为本发明的优选方案,所述谐波减速单元包括凸轮,凸轮固定于电机转子上,凸轮上安装有柔性轴承,柔性轴承的外圈套设有柔轮,柔轮与谐波刚轮齿啮合,柔轮的齿数小于谐波刚轮的齿数,柔轮上固定有输出法兰,柔轮与中心轴固定;所述左右摆动动力源的输出法兰与腰部固定端固定连接,输出固定盘设置于前后摆动动力源的输出法兰上。
12、当电机通电后,电机转子相对于电机定子转动,电机转子带动凸轮转动,凸轮通过柔性轴承推动柔轮与谐波刚轮啮合传动。若柔轮的齿数比谐波刚轮的齿数少n,则凸轮转动一圈时,柔轮相对于谐波刚轮转动n个齿,从而连接于柔轮上的输出法兰得到较大减速,保证稳定的输出力,且通过齿传动以保证传动精度。
13、作为本发明的优选方案,所述左右摆动动力源的中心轴上远离输出法兰的一侧还固定有旋转套轴,左右摆动动力源的谐波刚轮与旋转套轴固定,旋转套轴与腰部固定端转动连接。输出法兰和旋转套轴分别与腰部固定端的两侧连接,从而从两侧对腰部固定端进行支撑,保证腰部固定端与左右摆动动力源之间的相对转动更加平稳。
14、作为本发明的优选方案,所述谐波减速电机还包括交叉滚子轴承,交叉滚子轴承的内圈与输出法兰一体成型或固定连接,交叉滚子轴承的外圈与谐波刚轮一体成型或固定连接。交叉滚子轴承的外圈对谐波刚轮进行稳定支撑。
15、作为本发明的优选方案,所述凸轮的内侧与中心轴之间通过滚动轴承连接。中心轴对凸轮进行可靠支撑,且中心轴与凸轮能相对转动。
16、本发明的有益效果为:
17、本发明的左右摆动动力源动作时,左右摆动动力源的壳体带动整个腿部相对于腰部固定端左右摆动。当前后摆动动力源动作时,钢带驱动驱动固定盘相对于支撑连杆转动,前后摆动动力源的作用力反作用于自身并传递到大腿基体,从而推动大腿基体转动,进而实现腿部的前后摆动。左右摆动动力源和前后摆动动力源同时工作时,大腿做前后摆动和左右摆动的复合运动。本发明能模拟人体大腿真实的前后摆动、左右摆动或二者复合运动,其仿生性较高,且结构简单。
技术特征:
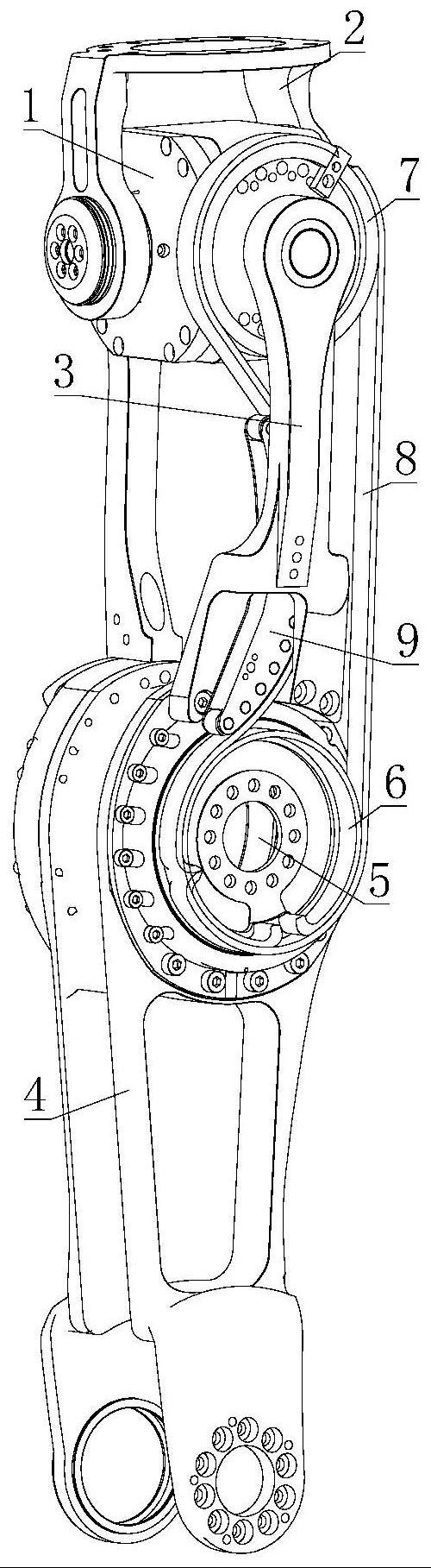
1.一种链带式腿部动作机构,其特征在于:包括左右摆动动力源(1),左右摆动动力源(1)的输出端连接有腰部固定端(2),左右摆动动力源(1)的壳体上转动连接有支撑连杆(3),还包括大腿基体(4),支撑连杆(3)的另一端与大腿基体(4)固定,大腿基体(4)上安装有前后摆动动力源(5),前后摆动动力源(5)的输出端设置有输出固定盘(6),左右摆动动力源(1)的壳体上固定有驱动固定盘(7),输出固定盘(6)与驱动固定盘(7)之间通过钢带(8)传动连接。
2.根据权利要求1所述的一种链带式腿部动作机构,其特征在于:所述支撑连杆(3)的数量为两根,两根支撑连杆(3)分别与左右摆动动力源(1)的壳体的两侧转动连接。
3.根据权利要求2所述的一种链带式腿部动作机构,其特征在于:所述大腿基体(4)与其中一根支撑连杆(3)之间固定有支撑板(9),支撑板(9)的一侧将钢带(8)压紧,支撑板(9)压紧钢带(8)的一侧的形状为弧形。
4.根据权利要求1所述的一种链带式腿部动作机构,其特征在于:所述驱动固定盘(7)的中心与支撑连杆(3)的转动中心共线。
5.根据权利要求1所述的一种链带式腿部动作机构,其特征在于:所述钢带(8)分别与输出固定盘(6)和驱动固定盘(7)固定。
6.根据权利要求1所述的一种链带式腿部动作机构,其特征在于:所述左右摆动动力源(1)和前后摆动动力源(5)均包括谐波减速电机,谐波减速电机包括中心轴(a1),中心轴(a1)上连接有电机定子(a2),电机定子(a2)上套设有电机转子(a3),电机转子(a3)连接有谐波减速单元(a4),谐波减速单元(a4)的输出端齿啮合有谐波刚轮(a5);所述支撑连杆(3)与左右摆动动力源(1)的谐波刚轮(a5)转动连接,驱动固定盘(7)固定于左右摆动动力源(1)的谐波刚轮(a5)上,左右摆动动力源(1)的谐波刚轮(a5)和左右摆动动力源(1)的中心轴(a1)相对固定;所述前后摆动动力源(5)的谐波刚轮(a5)和前后摆动动力源(5)的中心轴(a1)均固定于大腿基体(4)上。
7.根据权利要求6所述的一种链带式腿部动作机构,其特征在于:所述谐波减速单元(a4)包括凸轮(a41),凸轮(a41)固定于电机转子(a3)上,凸轮(a41)上安装有柔性轴承(a42),柔性轴承(a42)的外圈套设有柔轮(a43),柔轮(a43)与谐波刚轮(a5)齿啮合,柔轮(a43)的齿数小于谐波刚轮(a5)的齿数,柔轮(a43)上固定有输出法兰(a44);所述左右摆动动力源(1)的输出法兰(a44)与腰部固定端(2)固定连接,输出固定盘(6)设置于前后摆动动力源(5)的输出法兰(a44)上。
8.根据权利要求7所述的一种链带式腿部动作机构,其特征在于:所述左右摆动动力源(1)的中心轴(a1)上远离输出法兰(a44)的一侧还固定有旋转套轴(a7),左右摆动动力源(1)的谐波刚轮(a5)与旋转套轴(a7)固定,旋转套轴(a7)与腰部固定端(2)转动连接。
9.根据权利要求7所述的一种链带式腿部动作机构,其特征在于:所述谐波减速电机还包括交叉滚子轴承(a6),交叉滚子轴承(a6)的内圈与输出法兰(a44)一体成型或固定连接,交叉滚子轴承(a6)的外圈与谐波刚轮(a5)一体成型或固定连接。
10.根据权利要求7所述的一种链带式腿部动作机构,其特征在于:所述凸轮(a41)的内侧与中心轴(a1)之间通过滚动轴承(a11)连接。
技术总结
本发明属于仿生机器人技术领域,特别涉及一种链带式腿部动作机构。其技术方案为:一种链带式腿部动作机构,包括左右摆动动力源,左右摆动动力源的输出端连接有腰部固定端,左右摆动动力源的壳体上转动连接有支撑连杆,还包括大腿基体,支撑连杆的另一端与大腿基体固定,大腿基体上安装有前后摆动动力源,前后摆动动力源的输出端设置有输出固定盘,左右摆动动力源的壳体上固定有驱动固定盘,输出固定盘与驱动固定盘之间通过钢带传动连接。本发明提供了一种可进行前后摆动、左右摆动或二者复合运动的链带式腿部动作机构。
技术研发人员:胡天链
受保护的技术使用者:四川福德机器人股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!