一种爬柱机器人及工作方法
本发明涉及机器人,具体为一种爬柱机器人及工作方法。
背景技术:
1、本部分的陈述仅仅是提供了与本发明相关的背景技术信息,不必然构成在先技术。
2、高速铁路、公路等设施中存在较多的立柱,在对这些立柱进行维护和检测时,目前需要人工攀爬至立柱的设定高度上完成检测作业,此种方式占用较多的时间成本,并且高空作业环境下存在一定的危险性。现有技术存在一些能够沿柱面攀爬的机器人,虽然能够代替人工作业,但这类机器人受限于自身的结构设计,攀爬期间的稳定性不理想。
技术实现思路
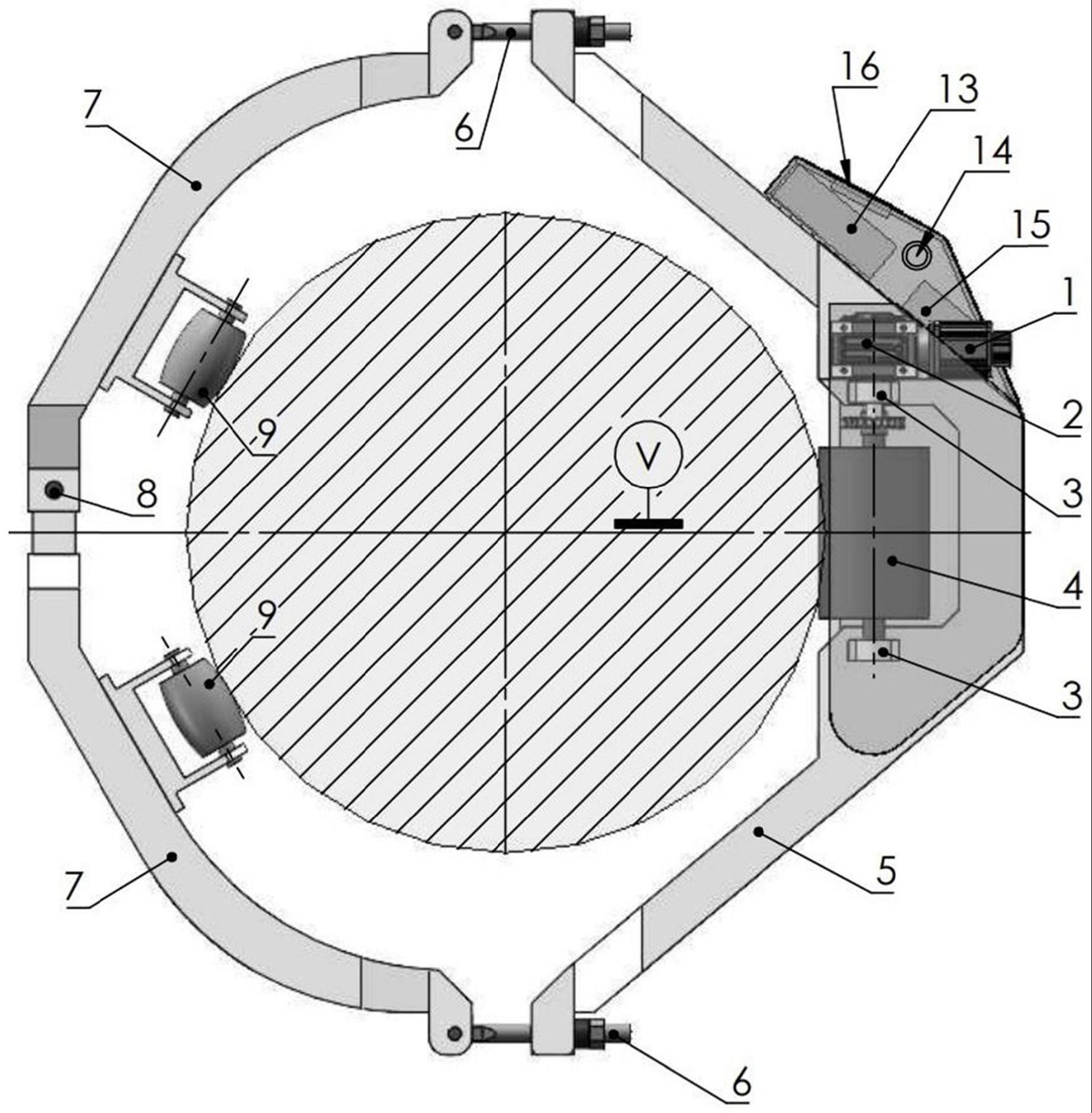
1、为了解决上述背景技术中存在的技术问题,本发明提供一种爬柱机器人及工作方法,利用动力支架和随动支架从环向方向抱紧立柱,配合动力支架上沿垂直方向布置的两组弹性胶轮作为驱动,随动支架上的滚轮跟随运动的方式,使得机器人能够沿着立柱表面上升或下降,在携带作业设备的情况下协助完成立柱的检查和维护作业。
2、为了实现上述目的,本发明采用如下技术方案:
3、本发明的第一个方面提供一种爬柱机器人,包括活动连接形成环状的动力支架和随动支架;
4、动力支架包括对称布置的两支架臂,两支架臂的一端均连接在动力单元上,另一端与随动支架连接;动力单元包括沿垂直方向布置的至少两组弹性胶轮,弹性胶轮与对应的链轮连接,其中一组链轮通过减速单元与驱动单元连接,两组弹性胶轮形成同步驱动结构;
5、随动支架包括两组首尾相接的支架本体,两组支架本体通过轴销关节活动连接,每一组支架本体上设有至少一组弧面滚轮,两弧面滚轮与弹性胶轮的连线相对称。
6、进一步的,随动支架中,每一组支架本体均为弧形,一端设有旋转柱销,旋转柱销通过紧固件与支架臂一端的开口u型槽连接,另一端设有轴销关节。
7、进一步的,链轮包括驱动链轮和从动链轮,位于上部的弹性胶轮与驱动链轮连接且轴线重合,位于下部的弹性胶轮与从动链轮连接且轴线重合,驱动链轮与从动链轮之间通过传动链条连接实现动力传递,驱动链轮通过减速单元与驱动单元连接。
8、进一步的,减速单元为蜗轮蜗杆减速机。
9、进一步的,驱动单元分别与控制器和电池组连接。
10、进一步的,动力单元具有沿垂直方向布置的控制仓和动力仓,每一个仓朝向立柱表面的区域对应一个弹性胶轮,驱动单元、减速单元、控制器以及电池组根据自身重量分布在不同的仓中。
11、进一步的,弹性胶轮包括轮体和连接在轮体圆周外侧的弹性层,在动力支架和随动支架连接后,弹性胶轮的弹性层受到柱面的压迫发生弹性形变,产生的形变效应区与立柱表面紧贴。
12、进一步的,紧固件一端与旋转柱销活动连接,另一端卡入开口u形槽中。
13、进一步的,随动支架中,相邻两组支架本体通过轴销关节活动连接。
14、本发明的第二个方面提供一种爬柱机器人的工作方法,包括以下步骤:
15、动力支架与随动支架连接形成环状,通过拧入紧固件的螺母,缩短动力支架和随动支架之间的直线距离,立柱表面压迫弹性胶轮产生形变效应区,动力支架与随动支架从环向方向抱紧立柱;
16、动力单元动作,通过链轮带动对应的弹性胶轮转动,带动动力支架沿立柱表面上升或下降,随动支架根据动力支架的动作同步执行上升或下降。
17、与现有技术相比,以上一个或多个技术方案存在以下有益效果:
18、1、通过动力支架上的开口u型槽和随动支架上的旋转柱销将机器人由立柱的环向抱紧,通过动力单元带动弹性胶轮转动使整个机器人能够沿立柱上升或下降,其中两个弹性胶轮在垂直方向并列布置,并且两个弹性胶轮相对于两个弧面滚轮中心线所在平面在高度方向上下对称,两个弧面滚轮又相对于弹性胶轮附着点和立柱中心线构成的立面对称,从而形成了双重对称的稳定受力结构,在实现沿柱面自动爬行时能够确保运动过程的稳定性。
19、2、爬柱机器人采用组合式框架式结构,机器人本体分成动力支架和随动支架两部分,两者之间通过开口u型槽和旋转柱销以及配合的紧固件,形成快速对接结构完成便捷组合,能够在现场快速组装动力支架和随动支架。
20、3、随动支架中,相邻两支架本体之间通过轴销关节活动连接,轴销关节能够提高随动支架的灵活保持能力。
21、4、动力支架和随动支架相连接的部分对称布置,配合弹性胶轮形成带有一定弹性的框架结构,实现环抱爬柱结构的预紧夹持力和动态附着稳定性。
22、5、动力单元中,通过蜗轮蜗杆减速机配合链条传动驱动两个弹性胶轮作为爬行动力,无需刹车装置即可实现停止即时自锁及其在柱面的附着功能,该驱动结构可实现双向行走,结构简单、行走可靠。
23、6、两个弹性胶轮沿垂直方向并列布置,利用链轮、链条联动使两个弹性胶轮并行驱动,实现柱面爬行附着稳定和可靠。
技术特征:
1.一种爬柱机器人,其特征在于:包括活动连接形成环状的动力支架和随动支架;
2.如权利要求1所述的一种爬柱机器人,其特征在于:所述随动支架中,每一组支架本体均为弧形,一端设有旋转柱销,旋转柱销通过紧固件与支架臂一端的开口u型槽连接,另一端设有轴销关节。
3.如权利要求1所述的一种爬柱机器人,其特征在于:所述链轮包括驱动链轮和从动链轮,位于上部的弹性胶轮与驱动链轮连接且轴线重合,位于下部的弹性胶轮与从动链轮连接且轴线重合,驱动链轮与从动链轮之间通过传动链条连接实现动力传递,驱动链轮通过减速单元与驱动单元连接。
4.如权利要求1所述的一种爬柱机器人,其特征在于:所述减速单元为蜗轮蜗杆减速机。
5.如权利要求1所述的一种爬柱机器人,其特征在于:所述驱动单元分别与控制器和电池组连接。
6.如权利要求1所述的一种爬柱机器人,其特征在于:所述动力单元具有沿垂直方向布置的控制仓和动力仓,每一个仓朝向立柱表面的区域对应一个弹性胶轮,驱动单元、减速单元、控制器以及电池组根据自身重量分布在不同的仓中。
7.如权利要求1所述的一种爬柱机器人,其特征在于:所述弹性胶轮包括轮体和连接在轮体圆周外侧的弹性层,在动力支架和随动支架连接后,弹性胶轮的弹性层受到柱面的压迫发生弹性形变,产生的形变效应区与立柱表面紧贴。
8.如权利要求2所述的一种爬柱机器人,其特征在于:所述紧固件一端与旋转柱销活动连接,另一端卡入开口u形槽中。
9.如权利要求2所述的一种爬柱机器人,其特征在于:所述随动支架中,相邻两组支架本体通过轴销关节活动连接。
10.如权利要求1-9任一项所述爬柱机器人的工作方法,其特征在于,包括以下步骤:
技术总结
本发明涉及一种爬柱机器人及工作方法,包括活动连接形成环状的动力支架和随动支架;动力支架包括两组倾斜布置的支架臂,两支架臂的一端均连接在动力单元上,另一端设有开口U型槽;动力单元包括沿垂直方向布置的至少两组弹性胶轮,弹性胶轮与对应的链轮连接,其中一组链轮通过减速单元与驱动单元连接;随动支架包括两组首尾相接的支架本体,每一组支架本体均为弧形,一端设有旋转柱销,旋转柱销通过紧固件与开口U型槽连接,另一端设有轴销关节,每一组支架本体上设有至少一组弧面滚轮,两弧面滚轮与弹性胶轮的连线相对称。
技术研发人员:王国锋,张广渊,谢振华,张怀亮,王一鸣
受保护的技术使用者:山东交通学院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!